CIP-2021 : H02P 21/00 : Disposiciones o métodos de control de máquinas eléctricas mediante control por vector,
p. ej., por control de la orientación del campo.
CIP-2021 › H › H02 › H02P › H02P 21/00[m] › Disposiciones o métodos de control de máquinas eléctricas mediante control por vector, p. ej., por control de la orientación del campo.
Notas[n] de H02P 21/00: - Cuando se clasifique en este grupo, deberá clasificarse también en los grupos H02P 25/00 cuando el método de control se caracterice por el tipo de motor que se controla.
- Cuando se clasifique en este grupo, deberá también clasificarse en el grupo H02P 27/00 cuando el método de control se caracterice por el tipo de tensión de alimentación del motor que se controla.
H02P 21/02 · especialmente adaptados para la optimización del rendimiento a baja carga.
H02P 21/04 · especialmente adaptados para velocidades muy bajas.
H02P 21/05 · especialmente adaptados para la amortiguación de las oscilaciones del motor, p. ej. para la reducción del penduleo.
H02P 21/06 · CControl basado en el flujo del rotor implicando la utilización de sensores de posición del rotor o sensores de velocidad del rotor.
H02P 21/08 · · Control indirecto de orientación del campo; Control predictivo del flujo del rotor.
H02P 21/09 · · · Cálculo del ángulo de fase del campo basado en la ecuación de tensión del rotor mediante la adición de frecuencia de deslizamiento y frecuencia proporcional a la velocidad.
H02P 21/10 · · Control de orientación del campo directo; Control de retroalimentación del flujo del rotor.
H02P 21/12 · Control basado en el flujo del estátor implicando la utilización de sensores de posición de rotor o sensores de velocidad del rotor.
H02P 21/13 · Control por observador, p. ej. utilizando observadores de Luenberger o filtros de Kalman.
H02P 21/14 · Estimación o adaptación de parámetros de la máquina, p. ej., flujo, corriente o voltaje.
H02P 21/16 · · Estimación de constantes, p. ej. la constante de tiempo del rotor.
H02P 21/18 · · Estimación de la posición o la velocidad.
H02P 21/20 · · Estimación del par.
H02P 21/22 · Control de corriente, p. ej. utilizando un bucle de control de corriente.
H02P 21/24 · Control de vectores que no implique la utilización de sensores de posición del rotor o velocidad del rotor.
H02P 21/26 · · Control basado en el flujo del rotor.
H02P 21/28 · · Control basado en el flujo del estátor.
H02P 21/30 · · · Control directo del par [DTC] o método de aceleración de campo [FAM].
H02P 21/32 · · Determinación de la posición inicial del rotor (H02P 21/34 tiene prioridad).
H02P 21/34 · Disposiciones para el arranque.
H02P 21/36 · Disposiciones para frenar o ralentizar; Control de cuatro cuadrantes.
CIP2021: Invenciones publicadas en esta sección.
PROCEDIMIENTO Y SISTEMA DE CONTROL PARA GENERADORES DE TURBINAS DE VIENTO.
(21/06/2012) Procedimiento y sistema de control para un generador en una turbina de viento que tiene una pluralidad de bobinas de estator que tienen acoplamiento magnético mutuo. El procedimiento y el sistema del mismo calculan corrientes continua y de cuadratura basadas en la corriente de fase determinada y un primer ángulo del rotor. Éste genera entonces una señal de control continua y de cuadratura. Éste determina un voltaje inducido resultante en sistema de coordenadas continuo-cuadratura causado por el acoplamiento magnético de las bobinas y por el movimiento del rotor. Éste calcula entonces el ángulo del voltaje inducido resultante.…
Dispositivo de accionamiento de motor eléctrico, y dispositivo de accionamiento de compresor.
(28/03/2012) Un activador de motor que comprende:
una unidad de rectificación para rectificar un voltaje de CA procedente de una fuente de CA en unvoltaje de CC;
una unidad de conversión de potencia para convertir la salida de voltaje de CC de la unidad derectificación en el voltaje de CC para ser aplicado a un motor ; y
una unidad de control 10 para controlar el voltaje aplicado al motor procedente de la unidad deconversión de potencia, en el que:
la unidad de control incluye una unidad de limitación de voltaje de salida que ejecuta un control detal manera que un valor escalar del voltaje aplicado al motor resulta igual o menor que un voltaje de salidamáximo definido por la salida de voltaje de CC de la unidad de rectificación ;
una magnitud de un voltaje limitado por la unidad de limitación…
Controlador de vehículo eléctrico.
(07/03/2012) Controlador de vehículo eléctrico que incluye un motor de C.A. , el controlador de vehículo eléctrico comprendiendo: un circuito principal configurado para convertir una electricidad de C.C: suministrada por una fuente de alimentación de C.C. en una electricidad de C.A. y suministrar la electricidad de C.A. al motor de C.A. ; una unidad de control vectorial configurada para generar una orden de conmutación para ordenar una operación de conmutación del circuito principal , realizando asi el control vectorial del motor de CA ; una unidad generadora de valores de orden de par motor configurada para generar un valor de orden de par motor que es un valor de orden de un par motor que el motor de C.A. hace que se produzca; y…
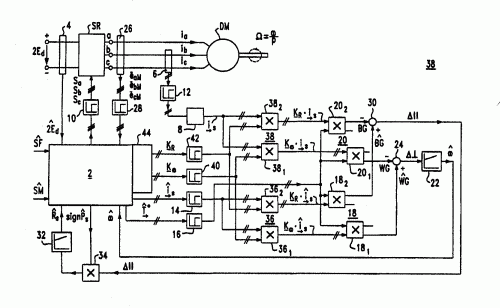
PROCEDIMIENTO Y DISPOSITIVO PARA DETERMINAR UNA VELOCIDAD ANGULAR DE ROTOR DE UNA MAQUINA DE CAMPO GIRATORIO SIN TRANSMISOR, CON FUNCIONAMIENTO POR ORIENTACION DE CAMPO.
(01/05/2007). Ver ilustración. Solicitante/s: SIEMENS AKTIENGESELLSCHAFT. Inventor/es: DEPENBROCK, MANFRED.
SEGUN LA INVENCION, TANTO EL VECTOR DE ESPACIO DEL MODELO DE CORRIENTE DEL ESTATOR (I S ) COMO EL VECTOR DE ESPACIO REAL DE CORRIENTE DEL ESTATOR (I S ) SE PROCESAN DE ACUERDO CON PUNTOS DE FUNCIONAMIENTO, EN CUANTO A SU POSICION Y AMPLITUD, ANTES DE QUE LOS CITADOS VECTORES DE ESPACIO PROCESADOS SE TRANSFORMEN EN UN SISTEMA COMPLEJO DE REFERENCIA. DE ESTE MODO, SE MEJORA EL PROCEDIMIENTO CONOCIDO PARA DETERMINAR LA VELOCIDAD DE ROTACION DE UNA MAQUINA POLIFASICA ACCIONADA POR ORIENTACION DE CAMPO SIN TRANSMISOR, QUE REPRESENTA POCO ESFUERZO, TENIENDO INCLUSO EN CUENTA LAS VELOCIDADES MAS LIGERAS DE ROTACION, DE MANERA QUE SE REDUCE CONSIDERABLEMENTE LA DEPENDENCIA DEL FUNCIONAMIENTO DE LA RELACION ENTRE LA DIFERENCIA DE VELOCIDAD DE ROTACION Y LA DESVIACION TIPICA.
PROCEDIMIENTO Y DISPOSITIVO PARA CAMBIAR ELEMENTOS DE TRANSPORTE.
(16/04/2007) Procedimiento para colocar pilas y para cambiar elementos de transporte por debajo de productos apilados, con las siguientes etapas del procedimiento: a) Fijación de una pila de productos (S) que descansa en una posición de salida (A) sobre un primer elemento de transporte (T1) entre el primer elemento de transporte en el extremo inferior de la pila (S) y una tapa de fijación (D) prevista en el extremo superior opuesto de la pila (S), en la que el primer elemento de transporte (T1) está dispuesto sobre un elemento de pie (F), b) Inmovilización de la pila entre al menos otras dos superficies laterales opuestas entre sí por medio de al menos dos mordazas de sujeción (K), c) Basculación y/o desplazamiento del elemento de pie (F) retirándolo de la parte inferior de la pila (S), de manera que se libere el primer elemento de transporte…
PROCEDIMIENTO Y APARATO PARA HACER FUNCIONAR SIN CODIFICADOR UN MOTOR SINCRONO DE IMAN PERMANENTE EN UN ASCENSOR.
(16/04/2006). Ver ilustración. Solicitante/s: OTIS ELEVATOR COMPANY. Inventor/es: AGIRMAN, ISMAIL, STANKOVIC, ALEKSANDER, M., CZERWINSKI, CHRIS, PIEDRA, ED.
Aparato para determinar la velocidad y posición de un motor síncrono de imán permanente, incluyendo: medios de corriente de eje d para suministrar corriente de eje d a dicho motor; incluyendo dichos medios de corriente de eje d un bucle de realimentación de corriente d; medios de corriente de eje q para suministrar corriente de eje q a dicho motor; incluyendo dichos medios de corriente de eje q un bucle de realimentación de corriente q; medios para inyectar una primera señal a dichos medios de corriente de eje d; y un controlador observador incluyendo unos medios de estimación de posición de tercer orden para medir una realimentación de corriente sensible a dicha primera señal inyectada para determinar una posición estimada de dicho motor y medios de estimación de velocidad para medir una realimentación de corriente sensible a dicha primera señal inyectada para determinar una velocidad estimada de dicho motor.
PROCEDIMIENTO DE CONTROL SIN SENSORES PARA ACCIONAMIENTOS DE MOTORES DE INDUCCION.
(16/10/2005) Procedimiento de control para medios de accionamiento eléctrico de motores de inducción, en el que dicho motor de inducción incluye un estator (ST) con una pluralidad de devanados del estator (ST1, ST2, ST3), con un rotor montado para su rotación en el interior del estator (ST) y un núcleo ferromagnético, comprendiendo dicho procedimiento los pasos de hacer funcionar dicho motor con un campo magnético principal en condiciones de saturación magnética con un flujo del entrehierro (TF) que tiene una distribución espacial con un contenido armónico que incluye por lo menos un componente armónico (T3) el cual induce en dichos devanados del estator (ST1, ST2, ST3) unas tensiones armónicas en las fases (V31, 32, V33) formando en el estator una tensión de orden cero (VSM) o una corriente cero (ISM), superponiendo a dicho campo magnético rotativo principal un campo…
PROCEDIMIENTO Y DISPOSITIVO DE MANDO DE UN CONVERTIDOR ESTATICO QUE ALIMENTA UNA FUENTE DE CORRIENTE.
(01/04/2005) Procedimiento de mando de un convertidor estático asociado a una fuente de corriente polifásica y a una fuente de tensión continua, estando dicho procedimiento destinado a permitir ajustar una magnitud eléctrica y/o magnética y/o mecánica de la fuente de corriente , llamada magnitud de control, caracterizado porque: - se generan unos instantes de sincronización t(i) definidos por un reloj de periodo T, - se mide por lo menos una magnitud eléctrica, magnética o mecánica, representativa del estado de la fuente de corriente, - se calcula a partir de las magnitudes medidas por lo menos una magnitud de control c(t), y su derivada c (t), y el valor cp (t(i)+T) que tomaría cada magnitud de control en el instante de sincronización siguiente t(i)+T, para la configuración Cc del convertidor estático en el instante t(i), - se compara cada magnitud…
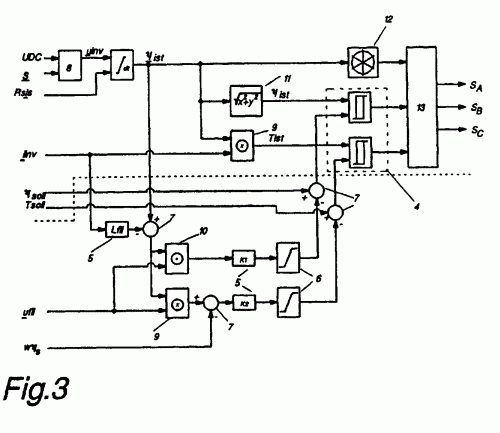
PROCEDIMIENTO Y DISPOSITIVO PARA LA REGULACION DIRECTA DEL PAR DE TORSION DE UNA MAQUINA DE CAMPO GIRATORIO.
(16/10/2004). Ver ilustración. Solicitante/s: ASEA BROWN BOVERI AG. Inventor/es: POHJALAINEN, PASI, STULZ, CHRISTIAN, DR.
SE EXPONEN UN PROCEDIMIENTO Y UN DISPOSITIVO PARA LA REGULACION DIRECTA DEL PAR MOTOR DE UNA MAQUINA DE CAMPO GIRATORIO ALIMENTADA A TRAVES DE UN FILTRO SINUSOIDAL, POSIBLE CASI SIEMPRE SIN LA GRAN ADAPTACION EN LOS CONOCIDOS PROCEDIMIENTOS O DISPOSITIVOS DTC. ADEMAS, SE DEBEN AMORTIGUAR DE MANERA EFICAZ LAS OSCILACIONES CONDICIONADAS POR EL PASO DEL FILTRO. ESTAS SE ELIMINAN PORQUE SE MIDE UNA CORRIENTE QUE ATRAVIESA EL FILTRO Y/O UNA TENSION DE SALIDA DEL FILTRO Y SE CORRIGEN EL VALOR TEORICO DEL FLUJO Y EL DEL PAR MOTOR SEGUN EL RESULTADO DE LA TENSION MEDIDA Y/O DE LA CORRIENTE MEDIDA. LA CORRECCION COMPRENDE LA TRANSFORMACION DE LA TENSION DE SALIDA DEL FILTRO EN UN COMPONENTE PERPENDICULAR AL FLUJO DEL ESTATOR Y EN UN SEGUNDO COMPONENTE PARALELO AL FLUJO DEL ESTATOR, ASI COMO LA DISMINUCION DE LOS VALORES TEORICOS DEL PAR MOTOR Y DEL FLUJO PROPORCIONALMENTE A LA PARTE OSCILANTE DE LA TENSION DE SALIDA DEL FILTRO.
PROCEDIMIENTO E INSTALACION PARA LA DETERMINACION DEL PAR DE TORSION DE UNA MAQUINA DE INDUCCION.
(01/05/2004). Solicitante/s: SIEMENS AKTIENGESELLSCHAFT. Inventor/es: GRIEPENTROG, GERD, RUNGGALDIER, DIETHARD.
Procedimiento para la determinación del par de torsión (mk) de una máquina de inducción , en el que a partir de las tensiones (u1, u2, u3) de los terminales del estator y de las corrientes (i1, i2, i3) de los terminales del estator se determina a través de integración y filtrado de paso alto siguiente un vector espacial (psik2) filtrado y, por lo tanto, libre de la porción de corriente continua, del flujo del estator concatenado, caracterizado porque el vector de tiempo (psik2) filtrado es multiplicado por un factor de corrección complejo (C2) para la corrección de los errores de las fases y de los errores de las amplitudes provocados por la integración y el filtrado de paso alto, relacionados en cada caso con la onda de base de la frecuencia de la red, y porque por medio de tal vector espacial corregido se calcula el par de torsión (mk) emitido por la máquina de inducción.
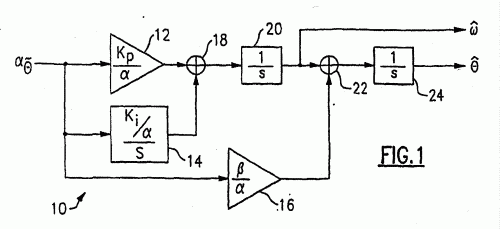
PROCEDIMIENTO Y DISPOSITIVO PARA REGULACION ORIENTADA DE CAMPO DE UNA MAQUINA DE CAMPO GIRATORIO.
(01/03/1998) LA INVENCION SE REFIERE A UN PROCEDIMIENTO ASI COMO UN DISPOSITIVO PERTENECIENTE PARA LA REGULACION ORIENTADA DE CAMPO DE UNA MAQUINA DE CAMPO GIRATORIO, DONDE UNA MAGNITUD (IQ{SOLL}) DE FORMACION DE MOMENTO SE REGULA A TRAVES DE UN CIRCUITO (DR) DE REGULACION DE VELOCIDAD DE GIRO Y UNA MAGNITUD (ID{SUB,SOLL}) DE FORMACION DE FLUJO SE REGULA A TRAVES DE UN CIRCUITO (FR) DE REGULACION DE CAMPO, DE TAL FORMA QUE EL FLUJO SE REGISTRA DE ACUERDO CON LA CANTIDAD (/{BS}/) DE FLUJO Y EL ANGULO ({EP}) DE FLUJO SEGUN LA RELACION Y LA CANTIDAD (/{BS}/) DE FLUJO SE IMPRIME A TRAVES DEL CIRCUITO (FR) DE REGULACION DE CAMPO, LOS FALLOS DE ORIENTACION DE EJE DE CAMPO SE CORRIGEN POR MEDIO DE AJUSTE DE FRECUENCIA, ESPECIALMENTE MEDIANTE AJUSTE DE LA FRECUENCIA (F{SUB,S}) DE DESLIZAMIENTO DE FORMA CORRESPONDIENTE A UNA DIFERENCIA ENTRE EL ANGULO ({EP}{SUB,TRANS})…
{kind=link}
{kind=link}
{kind=link}