CIP-2021 : B64C 19/00 : Control de aeronaves no previsto en otro lugar.
CIP-2021 › B › B64 › B64C › B64C 19/00[m] › Control de aeronaves no previsto en otro lugar.
Notas[t] desde B60 hasta B66: TRANSPORTES O MANUTENCION
B64C 19/02 · Controles conjuntos.
CIP2021: Invenciones publicadas en esta sección.
Procedimiento para solicitud de una intervención de un vehículo de control de vuelo electrónico.
(26/02/2020) Un procedimiento de solicitud de una intervención de un vehículo de control de vuelo electrónico por un piloto a bordo o miembro de la tripulación, en el que dicho vehículo de control de vuelo electrónico incluye controles de cabina convencionales y un sistema de navegación auxiliar de a bordo ; y en el que dicho vehículo de control de vuelo electrónico es controlado de manera remota por una primera estación de control y operación basada en tierra , GBCOS, y la alimentación eléctrica ha sido retirada de dichos controles de cabina convencionales ;
dicho procedimiento comprende:
enviar una señal de socorro desde a bordo del vehículo de control de vuelo electrónico a una…
Método y sistema para guía de aeronave.
(28/08/2019) Un método para guiar una aeronave que comprende las etapas de:
(a) seleccionar una trayectoria de vuelo prevista inicial como una función del tiempo;
(b) identificar un Tiempo de Llegada Requerido inicial (RTA) en un punto de referencia seleccionado;
(c) determinar, durante el vuelo, un Tiempo Estimado de Llegada (ETA) con base en uno o más parámetros medidos o previstos; y
(d) calcular una diferencia entre el RTA y el ETA;
(e) determinar si |RTA-ETA| es mayor o menor que un umbral de tiempo DT;
el método comprende además, cuando se determina que |RTA-ETA| < DT, las etapas de:
(f)(i) determinar…
(25/04/2018). Solicitante/s: BAE SYSTEMS PLC. Inventor/es: WHITE,NICHOLAS JAMES, WASSON,ROBERT MAXWELL.
Una unidad de equilibrado mediante amortiguación de las vibraciones para un aparato de dispositivo de control, contrarrestando dicha unidad la palanca de mando de dicho aparato que constituye una palanca de mando y comprendiendo:
una pared que define una cavidad; y
una pluralidad de masas de amortiguación de vibraciones alojadas dentro de la cavidad,
en donde la cavidad está configurada de tal manera que las masas de amortiguación de vibración se pueden mover libremente en cualquier dirección con relación a la pared de la cavidad y entre sí.
PDF original: ES-2671321_T3.pdf
Biaeronave para todo transporte aéreo.
(23/03/2017). Solicitante/s: MARTÍNEZ RIVERA, Emilio. Inventor/es: MARTÍNEZ RIVERA,Emilio.
Biaeronave para todo transporte aéreo, con capacidad para realizar operaciones de despegue y aterrizaje entre sí en vuelo.
La invención se refiere a una aeronave (denominada también como biaeronave) formada por los dos aviones independientes que la constituyen los cuales incorporados forman el fuselaje dividido de la misma y se corresponden entre sí en sus formas y aerodinámicas, en cuanto a la disposición de sus elementos de vuelo y características técnicas y sistemas de los mismos, capacidad de trabajo en conjunto y en su caso, distribución de espacios y dimensiones.
Esta biaeronave se dispone con sistemas para realizar operaciones de despegue y aterrizaje en vuelo de entre sus propios aviones que la forman así como con sistemas de seguridad y sistemas de alas y de vuelo adicionales.
Todo ello para las diferentes versiones de determinados sectores a donde va dirigida que son: transporte, militar y aeroespacial.
PDF original: ES-2606288_B1.pdf
PDF original: ES-2606288_A1.pdf
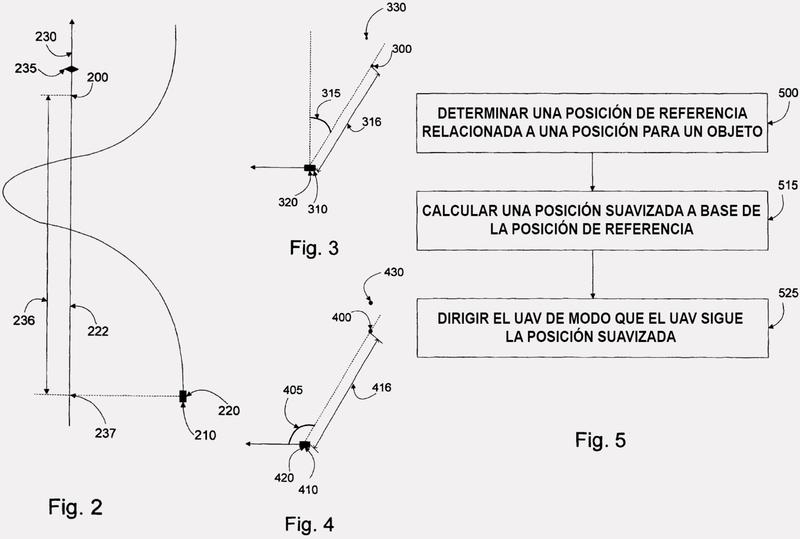
Procedimiento y sistema de dirección de un vehículo aéreo no tripulado.
(26/10/2016). Ver ilustración. Solicitante/s: UMS Skeldar Sweden AB. Inventor/es: MOLANDER,SÖREN, SÖDERMAN,JOHAN, WALDO,MATTIAS.
Un procedimiento de dirección de un UAV, Vehículo Aéreo No Tripulado, para habilitar un comando de alto nivel de dicho UAV, el procedimiento comprende las etapas de:
- determinar una posición de referencia relacionada con una posición para un objeto que dicho UAV debería seguir; estando el procedimiento caracterizado por:
- calcular una posición suavizada en base a en dicha posición de referencia, en el que el cálculo implica regular dicha posición suavizada a dicha posición de referencia, de modo que dicha posición suavizada tiene una frecuencia de movimiento más baja que dicha posición de referencia; y
- dirigir dicho UAV de modo que dicho UAV sigue la posición suavizada.
PDF original: ES-2612163_T3.pdf
Vehículo aéreo no tripulado que recupera energía de corrientes ascendentes de aire.
(17/08/2016) Un método para operar un vehículo aéreo no tripulado que tiene una capacidad de planeo dentro de una región geográfica, comprendiendo el vehículo aéreo no tripulado un generador dispuesto para ser accionado por un rotor , comprendiendo el método las etapas de:
indicar la ubicación de al menos una corriente ascendente de aire dentro del área geográfica; y
maniobrar el vehículo aéreo no tripulado dentro de la corriente ascendente de aire identificada;
el método caracterizado por:
definir un umbral máximo de altitud para una región geográfica, por encima del que no se permite el vuelo del vehículo aéreo no tripulado ; y
mantener una altura igual o inferior al umbral máximo de altitud…
Biaeronave para transporte aéreo en general con capacidad para realizar operaciones de despegue y aterrizaje entre sí en vuelo.
(02/01/2015) Biaeronave para transporte aéreo en general con capacidad para realizar operaciones de despegue y aterrizaje entre sí en vuelo.
La invención se refiere a una aeronave (denominada también como biaeronave) formada por los dos aviones independientes que la constituyen los cuales incorporados forman el fuselaje dividido de la misma y se corresponden entre sí en sus formas y aerodinámicas, en cuanto a la disposición de sus elementos de vuelo y características técnicas y sistemas de los mismos, capacidad de trabajo en conjunto y en su caso, distribución de espacios y dimensiones.
Esta biaeronave se dispone con sistemas para realizar operaciones de despegue y aterrizaje en vuelo de entre sus propios aviones que la forman así como con sistemas de seguridad y sistemas de alas y de vuelo adicionales.
Todo ello para las diferentes…
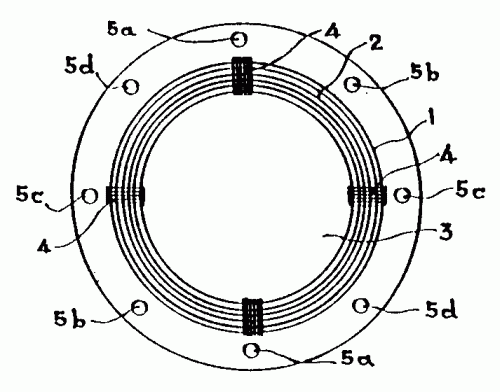
SISTEMA UNIVERSAL DE CONTROL DE TRAYECTORIAS Y ACELERACION DE INGENIOS MOVILES.
(01/05/1998). Ver ilustración. Solicitante/s: DORADO GONZALEZ,MANUEL.
SISTEMA UNIVERSAL DE CONTROL DE TRAYECTORIAS Y ACELERACION DE INGENIOS MOVILES. EL SISTEMA DE VARIACION DE LA TRAYECTORIA Y ACELERACION DE INGENIOS MOVILES SE FUNDAMENTA EN EL APROVECHAMIENTO DE LAS PARTICULARES CARACTERISTICAS DEL COMPORTAMIENTO DEL INGENIO AL QUE, POSEYENDO UN MOMENTO ANGULAR ADECUADO, SE LE APLICAN PARES DE FUERZAS. EL MOMENTO ANGULAR SE CONSIGUE HACIENDO ROTAR UNA MASA ALREDEDOR DE UN EJE. LA MASA PUEDE SER RIGIDA O BIEN ESTAR FORMADA POR UN VOLUMEN LIQUIDO, QUE SE HACE GIRAR DENTRO DE UN ANILLO TOROIDAL, MEDIANTE LA APLICACION DE LOS ADECUADOS PARES DE FUERZA QUE SE OBTIENEN CON LOS PROPULSORES SE CONSEGUIRA EL CAMBIO DE LA TRAYECTORIA O LA ACELERACION DEL INGENIO MOVIL. ESTE SISTEMA ENCUENTRA ESPECIAL APLICACION EN EL AMBITO DE LA NAVEGACION EN ESPECIAL LA AEREA Y LA AEROESPACIAL, SIENDO POSIBLE SU APLICACION EN OTROS CAMPOS DE LA TECNICA EN LOS QUE SE PRETENDA MODIFICAR EFICAZMENTE Y DE UNA MANERA PRECISA LA TRAYECTORIA DE UN MOVIL.
{kind=link}
{kind=link}