Dispositivo manipulador acoplable a un brazo robot.
(20/05/2019) 1. Dispositivo manipulador acoplable a un brazo robot, estando previsto para la manipulación de pilas formadas a partir de una pluralidad de elementos laminares superpuestos entre sí, que comprende una estructura de horquilla formada por un brazo superior y un brazo inferior dispuestos paralelos entre sí, siendo el brazo superior o inferior desplazable en sentido ascendente/descendente con respecto al brazo enfrentado a éste, siendo el brazo desplazable por unos medios de guiado presentes en una base de soporte , en el que se incluye un medio empujador desplazable en una dirección paralela a un eje longitudinal de cualquiera…
DISPOSITIVO AUTOMÁTICO DE POSICIONAMIENTO PARA CORTE DE TEJIDO TRIDIMENSIONAL EN UNA MUESTRA, VIBRÁTOMO QUE LO COMPRENDE Y SU USO.
(18/08/2016). Solicitante/s: UNIVERSITAT POLITECNICA DE VALENCIA. Inventor/es: MORATAL PÉREZ,David, QUIÑONES COLOMER,Darío Rubén, PÉREZ FEITO,Ricardo, GARCÍA MANRIQUE,Juan Antonio, CANALS GAMONEDA,Santiago.
Dispositivo automático de posicionamiento para corte de tejido tridimensional en una muestra, vibrátomo que lo comprende y su uso La presente invención se refiere a un dispositivo automático de posicionamiento para corte de tejido tridimensional, en una muestra de tejido viva o fijada caracterizado porque al menos comprende: - una plataforma para depositar las muestras de tejido - un subsistema electromecánico que al menos comprende - un primer motor y primeros medios mecánicos que imprimen un movimiento angular a la plataforma - un segundo motor y segundos medios mecánicos que imprimen un movimiento de inclinación de la plataforma a un vibrátomo que comprende este dispositivo de posicionamiento, y a su uso en histología, anatomía, neurociencia, bioquímica o farmacología.
Útil para pinza micro-técnica.
(16/03/2016) .Útil para pinza micro-técnica que comprende una contera que comprende:
- un soporte y
- un primer dedo y un segundo dedo ,
poseyendo cada dedo un zócalo de fijación por el cual está destinado a quedar fijado sobre una rama de micro-accionador para posicionar los dedos lado a lado en las posiciones iniciales respectivas, definidas con respecto al menos a una dirección de accionamiento de las ramas de la pinza micro-técnica y estando cada dedo unido al citado soporte por un elemento de unión respectivo (108A, 108B) flexible situado de tal manera que mantiene el dedo en una posición de reposo correspondiente a su posición inicial, siendo…
Dispositivo automático de posicionamiento para corte de tejido tridimensional en una muestra, vibrátomo que lo comprende y su uso.
(19/06/2015) Dispositivo automático de posicionamiento para corte de tejido tridimensional en una muestra, vibrátomo que lo comprende y su uso.
La presente invención se refiere a un dispositivo automático de posicionamiento para corte de tejido tridimensional, en una muestra de tejido viva o fijada caracterizado porque al menos comprende:
- una plataforma para depositar las muestras de tejido
- un subsistema electromecánico que al menos comprende
- un primer motor y primeros medios mecánicos que imprimen un movimiento angular a la plataforma
- un segundo motor y segundos medios mecánicos que imprimen un movimiento de inclinación de la plataforma
a un vibrátomo que…
DISPOSITIVO PORTABLE AUTÓNOMO, EN ESPECIAL APLICABLE EN CIRUGÍA, MANIPULACIÓN DE MICRO-COMPONENTES Y SIMILARES.
(13/07/2012) Dispositivo portable autónomo , en especial aplicable en cirugía, manipulación de micro-componentes y similares, comprendiendo una micro-herramienta de trabajo acoplable de forma extraíble a una carcasa principal , y medios de accionamiento para manipular la micro-herramienta de trabajo asociados a servomotores, cuyos medios de accionamiento comprenden un primer actuador asociado a un primer servomotor permitiendo un grado de libertad rotacional de la micro-herramienta de trabajo ; un segundo actuador asociado a un segundo servomotor, vinculado al primer actuador para un desplazamiento de translación de la micro-herramienta de trabajo hacia delante-detrás; y un tercer actuador asociado a un tercer servomotor que realiza un movimiento oscilante de la micro-herramienta…
DISPOSITIVO PORTABLE AUTÓNOMO, EN ESPECIAL, APLICABLE A CIRUGÍA, MANIPULACIÓN DE MICRO-COMPONENTES Y SIMILARES.
(21/06/2012) Dispositivo portable autónomo , en especial aplicable en cirugía, manipulación de micro-componentes y similares, comprendiendo una micro-herramienta de trabajo acoplable de forma extraíble a una carcasa principal , y medios de accionamiento para manipular la micro-herramienta de trabajo asociados a servomotores, cuyos medios de accionamiento comprenden un primer actuador asociado a un primer servomotor permitiendo un grado de libertad rotacional de la micro-herramienta de trabajo ; un segundo actuador asociado a un segundo servomotor, vinculado al primer actuador para un desplazamiento de translación de la micro-herramienta de trabajo hacia delante-detrás; y un tercer actuador asociado a un tercer servomotor que realiza un movimiento oscilante de la micro-herramienta de trabajo respecto…
BOMBEO PERISTALTICO OPTICO CON TRAMPAS OPTICAS.
(16/04/2006) Un procedimiento de transferencia de una partícula entre colectores de trampas ópticas, que comprende las etapas de: proporcionar un haz de luz láser , dividir el haz de luz láser en una pluralidad de haces de luz láser adicionales , enfocar los haces de luz láser adicionales para establecer una condición de gradiente óptico para cada uno de los haces de láser que, posteriormente, puede retener una partícula , proporcionar una pluralidad de patrones , incluyendo cada patrón al menos un colector y comprendiendo cada uno de dichos colectores al menos uno de los haces de láser con la condición de gradiente óptico formada a partir de los haces de luz láser con la pluralidad de patrones dispuestos de tal manera que al menos un colector, que comprende cada patrón, está separado por un colector de cada uno de los otros patrones e iluminar…
DISPOSITIVO PARA AJUSTAR UN COMPONENTE PARA LA TRANSMISION DE SEÑALES OPTICAS.
(16/10/1999). Ver ilustración. Solicitante/s: SIEMENS AKTIENGESELLSCHAFT. Inventor/es: MAIR, EDUARD.
UN COMPONENTE OPTICO ESTA DISPUESTO EN UN MANGUITO UNIDO POR JUNTA UNIVERSAL PARA PIVOTAR EN UNA CARCASA . UNOS RESORTES CURVADOS DESCANSAN SOBRE EL MANGUITO EN AMBOS LADOS DE LOS PIVOTES. LA POSICION ANGULAR DE LOS RESORTES PODRA ALTERARSE POR UNOS TORNILLOS DE AJUSTE EXTENDIDOS A LO LARGO DEL MANGUITO . EL AJUSTE SE TRANSMITE AL MANGUITO DE FORMA QUE LA POSICION ANGULAR DEL COMPONENTE OPTICO SE PUEDA ALTERAR. DE DICHA MANERA, SERA POSIBLE HACER MUY ESTRECHO EL DISPOSITIVO, DE FORMA QUE VARIOS DISPOSITIVOS PUEDAN SER DISPUESTOS MUY PROXIMOS ENTRE SI.
(16/02/1996). Solicitante/s: FORSCHUNGSZENTRUM JULICH GMBH. Inventor/es: BESOCKE, KARL-HEINZ, TESKE, MARTIN, FROHN, JOSEF, WOLF, J. FRANCIS.
PARA MOVER UNOS OBJETOS MICROSCOPICOS Y PODERLOS ANALIZAR EN UNA POSICION DETERMINADA O MECANIZARLOS, SE INDICA UN MICROMANIPULADOR QUE SE UTILIZA EN MICROSCOPIOS (RTM) CON TUNEL Y RETICULO. EL MICROMANIPULADOR PRESENTA VARIOS ELEMENTOS (2, 2', 2'') MOVIBLES QUE SOPORTAN Y MUEVEN EL OBJETO . PARA REALIZAR EL MOVIMIENTO MICROSCOPICO DE OBJETOS SE AJUSTAN PIEZOELECTRICAMENTE LOS ELEMENTOS MOVIBLES. LOS APOYOS (3, 3', 3'') SE PUEDEN DESPLAZAR A TRAVES DE LA DEFORMACION DE MATERIAS PIEZOELECTRICAS. PARA PODER REALIZAR EL MOVIMIENTO DE OBJETOS MICROSCOPICOS CON EL MICROMANIPULADOR SE GUIAN LOS OBJETOS MICROSCOPICOS POR UNO DE LOS ELEMENTOS MOVIBLES. ES APROPIADO IGUALMENTE EL AUTOMATIZAR EL SOPORTE DEL ELEMENTO MOVIBLE. EL SOPORTE SE PUEDE ASENTAR EN UN PUENTE PIEZOELECTRICO. PARA PODER MOVER OBJETOS MACROSCOPICOS EL SOPORTE SE PUEDE CONFORMAR COMO UNA PIEZA DE LA PLACA BASE (5A) SOBRE LA CUAL SE FIJA EL ELEMENTO (2A, 2'A, 2''A) MOVIBLE.
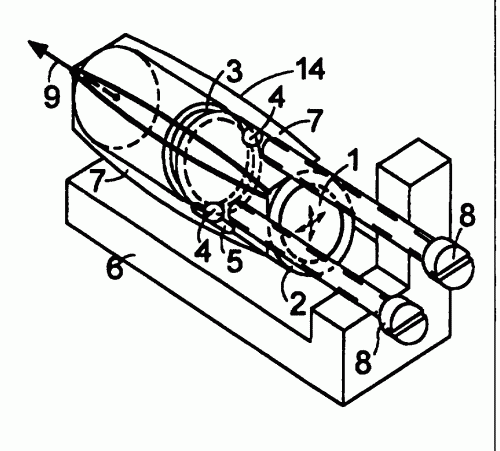
DISPOSITIVO DE DESPLAZAMIENTO DEL EXTREMO DE UNA FIBRA OPTICA, SIGUIENDO DOS EJES ORTOGONALES.
(01/04/1993) EL PRESENTE INVENTO ES UN DISPOSITIVO DE DESPLAZAMIENTO DEL EXTREMO DE UNA FIBRA OPTICA SIGUIENDO DOS EJES ORTOGONALES, QUE PERMITE EL ALINEAMIENTO DE ESTA FIBRA OPTICA CON OTRO ELEMENTO OPTICO. SE COMPONE DE UNA BASE SOBRE LA CUAL SE MANTIENE EL ELEMENTO OPTICO, Y UN SOLIDO DEFORMABLE (10B) INARTICULADO DE LAMINAS DELGADAS (14B) SOBRE EL CUAL ESTA FIJADA LA FIBRA OPTICA A ALINEAR. SE CARACTERIZA EN QUE EL SOLIDO DEFORMABLE ESTA HECHO DE UNA SOLA PIEZA Y SUS PARTES EN FORMA DE LAMINAS DELGADAS (14B) ESTAN DISPUESTAS SEGUN UN PARALELEPIPEDO DEL CUAL LA SECCION DERECHA, CUADRADA EN REPOSO, ES PERPENDICUALR AL EJE DE LA FIBRA OPTICA . LOS DOS EXTREMOS DE UNA DIAGONAL DE ESTE PARALELEPIPEDO ESTAN EL UNO FIJADO SOBRE LA BASE Y EL OTRO SOLIDARIO A LA FIBRA OPTICA A ALINEAR. LOS DOS EXTREMOS DE LA OTRA DIAGONAL CONSTITUYEN CADA…
{kind=link}