Estabilización de una línea de visión de un sistema de formación de imágenes instalado a bordo de un satélite.
Procedimiento de estabilización de una línea de visión (LS) de un sistema de formación de imágenes instalado a bordo de un satélite (100),
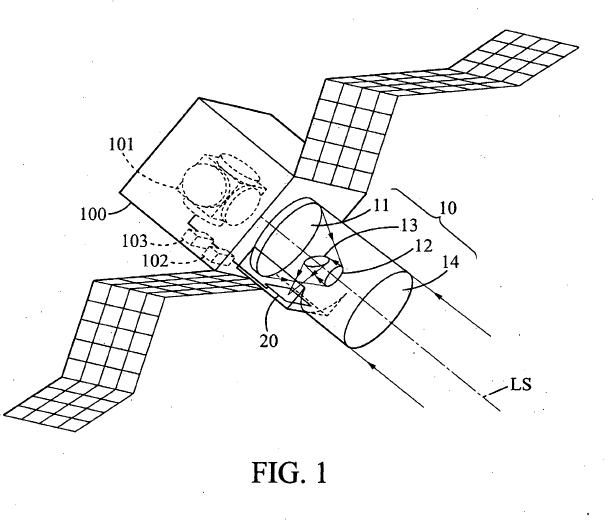
comprendiendo dicho sistema de formación de imágenes: 5 - un telescopio (10) dispuesto para formar una imagen de una escena en un plano focal siguiendo la línea de visión del sistema de formación de imágenes; y
- al menos un sensor matricial de imagen (20) dispuesto en el plano focal, y adaptado para captar imágenes sucesivas de acuerdo con un modo secuencial, en el cual los fotodetectores (21) del sensor se controlan de forma sucesiva e individual para una fase de acumulación de señal de detección de una radiación recibida seguida por una fase de lectura de una señal acumulada, de acuerdo con una orden de barrido de los fotodetectores que se repite de forma continua en bucle, correspondiendo cada repetición del barrido de los fotodetectores a una nueva imagen captada, y realizándose la fase de lectura para uno cualquiera de los fotodetectores al mismo tiempo que la fase de acumulación para otros de los fotodetectores;
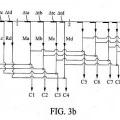
según el cual, para varias ventanas (22a-22d) formadas cada una por un subconjunto diferente de fotodetectores adyacentes en el interior del sensor, y siendo cada ventana más pequeña que la superficie útil total del sensor, se compara una porción de imagen (Ma-Md) que se capta en una de las ventanas en una de las repeticiones del barrido de los fotodetectores con un contenido de imagen de referencia (Ra-Rd) para la misma ventana de tal modo que se caracterice una variación de la línea de visión entre dicha repetición del barrido de los fotodetectores y un barrido de referencia, y obteniéndose una nueva caracterización de la variación de la línea de visión de forma separada para cada ventana en cada repetición del barrido de los fotodetectores;
y según el cual se cambia una orientación de una parte al menos del sistema de formación de imágenes de tal modo que se modifique la línea de visión para compensar al menos parcialmente la variación de dicha línea de visión.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2013/051176.
Solicitante: Airbus Defence and Space SAS.
Nacionalidad solicitante: Francia.
Dirección: 51-61, Route de Verneuil 78130 Les Mureaux FRANCIA.
Inventor/es: GEORGY,PIERRE-LUC.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G02B27/64 FISICA. › G02 OPTICA. › G02B ELEMENTOS, SISTEMAS O APARATOS OPTICOS (G02F tiene prioridad; elementos ópticos especialmente adaptados para ser utilizados en los dispositivos o sistemas de iluminación F21V 1/00 - F21V 13/00; instrumentos de medida, ver la subclase correspondiente de G01, p. ej. telémetros ópticos G01C; ensayos de los elementos, sistemas o aparatos ópticos G01M 11/00; gafas G02C; aparatos o disposiciones para tomar fotografías, para proyectarlas o para verlas G03B; lentes acústicas G10K 11/30; "óptica" electrónica e iónica H01J; "óptica" de rayos X H01J, H05G 1/00; elementos ópticos combinados estructuralmente con tubos de descarga eléctrica H01J 5/16, H01J 29/89, H01J 37/22; "óptica" de microondas H01Q; combinación de elementos ópticos con receptores de televisión H04N 5/72; sistemas o disposiciones ópticas en los sistemas de televisión en colores H04N 9/00; disposiciones para la calefacción especialmente adaptadas a superficies transparentes o reflectoras H05B 3/84). › G02B 27/00 Aparatos o sistemas ópticos no previstos en ninguno de los grupos G02B 1/00 - G02B 26/00, G02B 30/00. › Sistemas para obtener imágenes que utilizan elementos ópticos para la estabilización lateral y angular de la imagen (sistemas de enfoque G02B 7/04; regulación del sistema óptico relativo a la imagen dentro de los aparatos fotográficos, los proyectores o los reproductores G03B 5/00).
- H04N5/232 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › H04N 5/00 Detalles de los sistemas de televisión (Detalles de los dispositivos de análisis o sus combinaciones con la producción de la tensión de alimentación H04N 3/00). › Dispositivos para el control de las cámaras de televisión, p. ej. control a distancia (H04N 5/235 tiene prioridad).
PDF original: ES-2547706_T3.pdf


Fragmento de la descripción:
Estabilización de una línea de visión de un sistema de formación de imágenes instalado a bordo de un satélite Sector de la técnica
La presente invención se refiere a un procedimiento de estabilización de una línea de visión de un sistema de formación de imágenes que está instalado a bordo de un satélite. Esta se refiere también a un sistema de formación de imágenes que está adaptado para permitir dicha estabilización.
Estado de la técnica
Es habitual utilizar imágenes que se captan de forma sucesiva desde un satélite para detectar variaciones de una línea de visión de formación de imágenes, y a continuación corregir esta línea de visión para compensar las variaciones de esta.
Cuando la línea de visión es fija con respecto al satélite, algunas modificaciones de la orientación del satélite entero que se realizan para compensar las variaciones de la línea de visión permiten estabilizar la actitud del satélite, es decir su orientación angular con respecto a unos puntos de referencia externos. En particular, estos puntos de referencia se pueden visualizar en las imágenes que se captan.
Otra aplicación de la estabilización de la línea de visión de un sistema de formación de imágenes que está instalado a bordo de un satélite consiste en reducir el desenfoque de las imágenes que se captan. Este desenfoque está causado por las variaciones involuntarias de la línea de visión que se producen mientras dura la exposición de los fotodetectores del sensor de imagen. Estas variaciones involuntarias pueden estar provocadas por las vibraciones que producen los elementos móviles del satélite, tales como los actuadores de control de actitud, o una rueda de filtros, o incluso del carburante en fase líquida.
El documento US 2009/021588 publicado el 22/01/2009 se refiere al movimiento de un dispositivo de formación de imágenes que se produce durante la exposición de una imagen. En particular, se refiere a las formas de realización de los procedimientos de tratamiento de señales digitales obtenidas por un sensor de imagen para determinar y corregir el movimiento del dispositivo.
De forma general, la estabilización de la línea de visión del sistema de formación de imágenes es más eficaz cuando el periodo de latencia es corto entre la aparición de una nueva variación de la línea de visión, por una parte, y el instante en que se obtiene el resultado de la caracterización de esta variación, por otra parte. Cuando este periodo de latencia es corto, se puede controlar de forma eficaz el sistema de control de actitud del satélite, o un soporte móvil del sistema de formación de imágenes, o incluso un sistema de apuntamiento variable, de tal modo que compense al menos en parte la variación de la línea de visión que se ha detectado y caracterizado. Dicho de otro modo, se puede estabilizar por tanto de forma eficaz la línea de visión, con una gran reactividad con respecto a sus variaciones involuntarias.
Otro objetivo general de los procedimientos de estabilización de la línea de visión consiste en producir caracterizaciones sucesivas de la dirección de esta línea de visión de acuerdo con una frecuencia de caracterización que sea lo suficientemente elevada.
Otro objetivo más de los procedimientos de estabilización de la línea de visión de un sistema de formación de imágenes que está instalado a bordo de un satélite consiste en permitir dicha estabilización con una precisión que sea elevada. En particular, es necesario caracterizar las variaciones de la línea de visión con una precisión superior a la que se puede obtener utilizando unos giroscopios o unos detectores estelares.
Por último, otro objetivo más de la invención consiste en la obtención de dicha estabilización mejorada de la línea de visión, que no precisa instalar a bordo del satélite unos equipos adicionales que sean pesados, voluminosos o caros. Dicho de otro modo, la invención pretende mejorar la estabilización de la línea de visión modificando lo menos posible los equipos que ya están presentes a bordo del satélite.
Objeto de la invención
Para conseguir estos objetivos y otros, la invención propone un nuevo procedimiento de estabilización de una línea de visión de un sistema de formación de imágenes que está instalado a bordo de un satélite, cuando este sistema de formación de imágenes comprende:
- un telescopio, que está dispuesto para formar una imagen de una escena en un plano focal siguiendo la línea de visión del sistema de formación de imágenes; y
- al menos un sensor matricial de imagen que está dispuesto en el plano focal, y adaptado para captar imágenes
sucesivas de acuerdo con un modo secuencial en el cual los fotodetectores del sensor se controlan de forma sucesiva e Individual para una fase de acumulación de señal de detección de una radiación recibida seguida por una fase de lectura de una señal acumulada, de acuerdo con una orden de barrido de los fotodetectores que se repite de forma continua en bucle, correspondiendo cada repetición del barrido de los fotodetectores a una nueva Imagen captada, y realizándose la fase de lectura para uno cualquiera de los fotodetectores al mismo tiempo que la fase de acumulación para otros de los fotodetectores.
Dicho de otro modo, el sensor de imagen que se utiliza para el procedimiento de la invención está adaptado para captar las imágenes en modo denominado "rolling shutter" en Inglés, por oposición al modo denominado global, o "snapshot", para el cual la fase de acumulación de la señal de detección es síncrona para todos los fotodetectores, para captar una misma imagen.
En el procedimiento de la invención, para varias ventanas que están formadas cada una por un subconjunto diferente de fotodetectores adyacentes en el interior del sensor, y siendo cada ventana más pequeña que la superficie útil total del sensor, se compara una porción de imagen que se capta en una de las ventanas durante una de las repeticiones del barrido de los fotodetectores con un contenido de Imagen de referencia para la misma ventana. De este modo, se puede caracterizar una variación de la línea de visión, entre la repetición del barrido de los fotodetectores y un barrido de referencia, y se obtiene una nueva caracterización de la variación de la línea de visión de forma separada para cada ventana en cada repetición del barrido de los fotodetectores. Se cambia entonces una orientación de una parte al menos del sistema de formación de imágenes de tal modo que se modifique la línea de visión, para compensar al menos parcialmente la variación de la línea de visión que se ha caracterizado.
De este modo, el procedimiento de estabilización de la invención utiliza el sensor de imagen que funciona en modo "rolling shutter", de modo que este sensor no se añade especialmente para estabilizar la línea de visión cuando ya está previsto para una función de formación de imágenes, en particular una función de formación de imágenes de alta resolución.
Por medio de la utilización de ventanas en el sensor para adquirir porciones de imagen que son reducidas, la duración total de la lectura de cada ventana es inferior al periodo de captación de una imagen completa con todos los fotodetectores del sensor. Aquella puede ser muy inferior a este último cuando la ventana es mucho más pequeña que la superficie total del sensor que se utiliza para la función de formación de imágenes. La porción de imagen que se capta en cada ventana en cada barrido del modo "rolling shutter" se compara con la que se ha captado durante un barrido anterior, pero la utilización de varias ventanas diferentes permite obtener comparaciones de porciones de imagen en la frecuencia del barrido del modo "rolling shutter" multiplicada por el número de ventanas. De este modo, la frecuencia de caracterización de las variaciones de la línea de visión es superior, y puede ser incluso muy superior, a la de la captación de imágenes completas por el sensor.
Además, gracias al tamaño reducido de las ventanas, estas se pueden leer con una duración total de lectura que sea corta para cada ventana. Este es el caso, en particular, cuando los fotodetectores de una misma ventana se leen de forma consecutiva, es decir unos a continuación de otros. Las porciones de imagen correspondientes constituyen también unas cantidades de datos que son reducidas, para las cuales se pueden realizar de forma rápida las operaciones de comparación y de correlación de contenidos de imágenes. Dicho de otro modo, el periodo de latencia entre la aparición de una nueva variación de la línea de visión y la obtención del resultado de su caracterización puede ser corto o muy corto. De este modo,... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de estabilización de una línea de visión (LS) de un sistema de formación de imágenes instalado a bordo de un satélite (100), comprendiendo dicho sistema de formación de imágenes:
- un telescopio (10) dispuesto para formar una imagen de una escena en un plano focal siguiendo la línea de visión del sistema de formación de imágenes; y
- al menos un sensor matricial de imagen (20) dispuesto en el plano focal, y adaptado para captar imágenes sucesivas de acuerdo con un modo secuencial, en el cual los fotodetectores (21) del sensor se controlan de forma sucesiva e individual para una fase de acumulación de señal de detección de una radiación recibida seguida por una fase de lectura de una señal acumulada, de acuerdo con una orden de barrido de los fotodetectores que se repite de forma continua en bucle, correspondiendo cada repetición del barrido de los fotodetectores a una nueva imagen captada, y realizándose la fase de lectura para uno cualquiera de los fotodetectores al mismo tiempo que la fase de acumulación para otros de los fotodetectores;
según el cual, para varias ventanas (22a-22d) formadas cada una por un subconjunto diferente de fotodetectores adyacentes en el interior del sensor, y siendo cada ventana más pequeña que la superficie útil total del sensor, se compara una porción de imagen (Ma-Md) que se capta en una de las ventanas en una de las repeticiones del barrido de los fotodetectores con un contenido de imagen de referencia (Ra-Rd) para la misma ventana de tal modo que se caracterice una variación de la línea de visión entre dicha repetición del barrido de los fotodetectores y un barrido de referencia, y obteniéndose una nueva caracterización de la variación de la línea de visión de forma separada para cada ventana en cada repetición del barrido de los fotodetectores;
y según el cual se cambia una orientación de una parte al menos del sistema de formación de imágenes de tal modo que se modifique la línea de visión para compensar al menos parcialmente la variación de dicha línea de visión.
2. Procedimiento de acuerdo con la reivindicación 1, según el cual se retoma el mismo contenido de imagen de referencia (Ra-Rd) para varias caracterizaciones sucesivas de la variación de la línea de visión (LS) obtenidas a partir de una misma de las ventanas, de tal modo que se utilice una misma dirección de referencia para dichas caracterizaciones de la variación de la línea de visión.
3. Procedimiento de acuerdo con la reivindicación 1, según el cual para cada nueva caracterización de la variación de la línea de visión (LS), el contenido de imagen de referencia utilizado para cada ventana (22a-22d) es la porción de imagen que se ha captado en la misma ventana en la repetición del barrido de los fotodetectores (21) que corresponde a la caracterización de la variación de la línea de visión justo anterior a dicha nueva caracterización, de tal modo que una dirección de la línea de visión resultante de la caracterización anterior constituye una dirección de referencia para la nueva caracterización
4. Procedimiento de acuerdo con una cualquiera de las reivindicaciones anteriores, según el cual las ventanas (22a-22d) para las cuales se comparan las porciones de imágenes entre dos repeticiones del barrido de los fotodetectores (21) están separadas en el interior del sensor (20).
5. Procedimiento de acuerdo con una cualquiera de las reivindicaciones anteriores, según el cual las ventanas (22a-22d) para las cuales se comparan las porciones de imágenes entre dos repeticiones del barrido de los fotodetectores (21) corresponden a unas posiciones diferentes de una misma plantilla en el interior del sensor (20), y las ventanas se determinan mediante las traslaciones sucesivas de la plantilla en el interior del sensor a medida que avanza el barrido de los fotodetectores para cada imagen captada.
6. Procedimiento de acuerdo con una cualquiera de las reivindicaciones anteriores, según el cual el sensor de imagen (20) comprende al menos dos circuitos separados de control y de lectura dedicados respectivamente a unas partes el sensor (20a, 20b) complementarias y formadas cada una por un subconjunto de fotodetectores (21) adyacentes, de tal modo que las partes de imagen se capten respectivamente por las partes del sensor según el modo secuencial implementado de forma separada y simultánea en el interior de dichas partes del sensor, estando al menos una de las ventanas (20a-20f) definida en el interior de cada parte del sensor,
y según el cual se comparan las porciones de imágenes captadas en cada ventana en el interior de cada parte del sensor, entre dos repeticiones diferentes del barrido de los fotodetectores de dicha parte del sensor.
7. Procedimiento de acuerdo con una cualquiera de las reivindicaciones anteriores, según el cual vahos sensores de imágenes separados están dispuestos en el plano focal de tal modo que capten de forma simultánea imágenes respectivas de acuerdo con el modo secuencial implementado de forma separada para cada sensor,
y según el cual se comparan las porciones de imágenes captadas en unas ventanas en el interior de cada sensor, entre dos repeticiones diferentes del barrido de los fotodetectores de dicho sensor, de forma simultánea para dichos varios sensores.
8. Procedimiento de acuerdo con una cualquiera de las reivindicaciones anteriores, según el cual se pondera, se selecciona o se rechaza un resultado de cada caracterización de la variación de la línea de visión (LS) en función de un contenido o de un nivel de calidad de la porción de imagen que se capta y se compara con el contenido de
imagen de referencia para dicha caracterización.
9. Procedimiento de acuerdo con una cualquiera de las reivindicaciones anteriores, según el cual se filtran a continuación varios resultados de caracterizaciones de la variación de la línea de visión (LS), que se han obtenido de forma sucesiva para unas ventanas (22a-22d) diferentes o para unas repeticiones diferentes del barrido de los fotodetectores (21), con respecto a una velocidad de variación de dichos resultados.
10. Procedimiento de acuerdo con una cualquiera de las reivindicaciones anteriores, según el cual se calcula una variación media de la línea de visión (LS) a partir de varios resultados de caracterizaciones de la variación de la línea de visión que se han obtenido para unas ventanas (22a-22d) diferentes o para unas repeticiones diferentes del barrido de los fotodetectores (21).
11. Procedimiento de acuerdo con una cualquiera de las reivindicaciones anteriores, que comprende además las siguientes etapas:
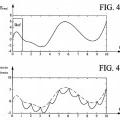
- calcular una descomposición de serie de Fourier para unos resultados de caracterizaciones sucesivas de la variación de la línea de visión (LS), en forma de una suma de componentes con variaciones periódicas respectivamente asociadas a unos valores de una frecuencia de variación de la línea de visión;
- aplicar una corrección en ciertas amplitudes de las componentes con variaciones periódicas, de tal modo que se reduzcan las variaciones de dichas amplitudes en unos intervalos limitados alrededor de múltiplos de la frecuencia del barrido de los fotodetectores (21); y a continuación
- calcular una recomposición de serie de Fourier a partir de las componentes con variaciones periódicas, utilizando las amplitudes corregidas en interior de los intervalos limitados alrededor de los múltiplos de la frecuencia del barrido de los fotodetectores, proporcionando dicha recomposición de serie de Fourier unos resultados corregidos para las caracterizaciones sucesivas de la variación de la línea de visión.
12. Procedimiento de acuerdo con una cualquiera de las reivindicaciones anteriores, según el cual el barrido repetido de los fotodetectores (21) para captar las imágenes sucesivas se realiza, en primer lugar, en una primera frecuencia durante un primer periodo, y a continuación en una segunda frecuencia diferente de la primera frecuencia durante un segundo periodo, seleccionándose la primera y la segunda frecuencia de tal modo que unos solapamientos de espectro, que afectan a los resultados obtenidos durante cada periodo para la variación de la línea de visión (LS), sean diferentes.
13. Procedimiento de acuerdo con la reivindicación 12, según el cual el barrido de los fotodetectores (21) durante uno del primero y del segundo periodo es más lento que durante el otro de dichos periodos, utilizando un mismo número de fotodetectores para el modo secuencial que se implementa durante cada uno de dichos periodos.
14. Procedimiento de acuerdo con la reivindicación 12, según el cual el barrido que se realiza en la frecuencia más elevada está restringido a un primer número de los fotodetectores (21) del sensor de Imagen (20), más pequeño que un segundo número de los fotodetectores de dicho sensor de imagen utilizados para el barrido que se realiza en la frecuencia más baja.
15. Procedimiento de acuerdo con una cualquiera de las reivindicaciones anteriores, según el cual varios sensores matriciales de imagen están dispuestos en el plano focal para captar de forma simultánea unas Imágenes respectivas de acuerdo con el modo secuencial implementado de forma separada para cada sensor de Imagen, y según el cual el barrido de los fotodetectores para el modo secuencial se puede repetir en una primera frecuencia para el primero de dichos sensores de imagen y en una segunda frecuencia para el segundo de dichos sensores de imagen, siendo la primera y la segunda frecuencia diferentes y seleccionándose de tal modo que los múltiplos de la primera frecuencia no coincidan con los múltiplos de la segunda frecuencia.
16. Procedimiento de acuerdo con una cualquiera de las reivindicaciones 1 a 15, según el cual se cambia la orientación de la parte del sistema de formación de imágenes (10) variando una orientación de un soporte móvil de dicho sistema de formación de imágenes con respecto a una estructura principal del satélite (100), o variando una orientación de un dispositivo de apuntamiento variable dispuesto para ajustar la línea de visión (LS) con respecto al sensor de imagen (20).
17. Procedimiento de acuerdo con una cualquiera de las reivindicaciones 1 a 15, según el cual se cambia la orientación del sistema de formación de imágenes (10) variando una actitud del satélite (100) y manteniendo fija la línea de visión (LS) con respecto al satélite.
18. Sistema de formación de imágenes destinados a instalarse a bordo de un satélite (100) y adaptado para estabilizar la línea de visión (LS) de dicho sistema de formación de imágenes, que comprende:
- un telescopio (10) dispuesto para formar una imagen de una escena en un plano focal, siguiendo la línea de visión del sistema de formación de imágenes;
- al menos un sensor matricial de imagen (20) dispuesto en el plano focal, y adaptado para captar unas imágenes
sucesivas de acuerdo con un modo secuencial, en el cual unos fotodetectores (21) del sensor se controlan de forma sucesiva e Individual para una fase de acumulación de señal de detección de una radiación recibida seguida por una fase de lectura de una señal acumulada, de acuerdo con una orden de barrido de los fotodetectores que se repite de forma continua en bucle, correspondiendo cada repetición del barrido de los fotodetectores a una nueva imagen captada, y realizándose la fase de lectura para uno cualquiera de los fotodetectores al mismo tiempo que la fase de acumulación para otros de los fotodetectores; y
- una unidad de comparación de imágenes (102), adaptada para seleccionar varias ventanas (22a-22d) formadas cada una por un subconjunto diferente de fotodetectores adyacentes en el interior del sensor, siendo cada ventana más pequeña que la superficie útil total del sensor, y adaptada para comparar una porción de imagen (Ma-Md) que se ha captado en una de las ventanas en una de las repeticiones del barrido de los fotodetectores con un contenido de imagen de referencia (Ra-Rd) para la misma ventana, de tal modo que se caracterice una variación de la línea de visión entre dicha repetición del barrido de los fotodetectores y un barrido de referencia, y adaptada para obtener una nueva caracterización de la variación de la línea de visión de forma separada para cada ventana en cada repetición del barrido de los fotodetectores; y
- una unidad de control (103) adaptada para controlar un cambio de una orientación de una parte al menos del sistema de formación de imágenes, de tal modo que se modifique la línea de visión para compensar al menos parcialmente la variación de dicha línea de visión.
19. Sistema de acuerdo con la reivindicación 18, adaptado para implementar un procedimiento de acuerdo con una cualquiera de las reivindicaciones 1 a 15.
20. Sistema de acuerdo con la reivindicación 18 o 19, que comprende además un soporte móvil del sistema de formación de imágenes dispuesto para modificar una orientación de dicho sistema de formación de imágenes, y la unidad de control está dispuesta para controlar un cambio de una orientación del soporte móvil, de tal modo que modifique la línea de visión (LS) para compensar al menos parcialmente la variación de dicha línea de visión.
21. Sistema de acuerdo con la reivindicación 18 o 19, que comprende además un dispositivo de apuntamiento variable dispuesto para modificar la línea de visión (LS) con respecto al sensor de imagen (20), y la unidad de control está dispuesta para controlar un desplazamiento del dispositivo de apuntamiento variable de tal modo que compense al menos parcialmente la variación de dicha línea de visión.
22. Sistema de acuerdo con la reivindicación 18 o 19, en el cual la unidad de control (103) está adaptada para controlar el funcionamiento de un sistema de control de actitud y de órbita (101) del satélite (100), de tal modo que se modifique la actitud del satélite para compensar al menos parcialmente la variación de la línea de visión (LS).
Patentes similares o relacionadas:
Retenedor para dispositivo de aumento electrónico, del 15 de Julio de 2020, de FREEDOM SCIENTIFIC INC.: Un dispositivo de aumento para su uso por usuarios ciegos o con baja visión, incluyendo el dispositivo de aumento una mesa que tiene un borde delantero, […]
Dispositivo de imágenes para escenas en movimiento aparente, del 17 de Junio de 2020, de Urugus S.A: Un aparato para obtener imágenes de una escena que tiene movimiento aparente, el aparato que comprende: un dispositivo de imágenes de área […]
Dispositivo que comprende un dispositivo de imágenes multicanal y procedimiento para producirlo, del 3 de Junio de 2020, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Un dispositivo que comprende: una carcasa que tiene una primera área transparente (14a) y una segunda área transparente (14b); […]
Dispositivo de ajuste de eje óptico de cámara, y cámara que lo tiene, del 27 de Mayo de 2020, de Hangzhou Hikmicro Sensing Technology Co., Ltd: Un dispositivo de ajuste de eje óptico de cámara, caracterizado porque se usa para ajustar un sistema de eje óptico de cámara y comprende: un soporte […]
Enfoque para escena de fuente de luz puntual, del 15 de Abril de 2020, de Zhejiang Uniview Technologies Co., Ltd: Un procedimiento de enfoque, que comprende: establecer posiciones de una lente de enfoque secuencialmente; registrar información estadística […]
Procedimiento de fotografía usando un dispositivo electrónico externo y dispositivo electrónico que soporta el mismo, del 1 de Abril de 2020, de SAMSUNG ELECTRONICS CO., LTD.: Un dispositivo electrónico que comprende: un circuito de comunicación; una memoria configurada para almacenar contenidos que incluyen una cuarta imagen en la que se […]
Procedimiento y aparato de grabación de imagen de vídeo en un terminal portátil que tiene doble cámara, del 1 de Abril de 2020, de SAMSUNG ELECTRONICS CO., LTD.: Un procedimiento de grabación de vídeo por un terminal portátil de doble cámara , que comprende: emitir un primer flujo de vídeo capturado por una primera […]
Técnicas para enfocar automáticamente una cámara digital, del 18 de Marzo de 2020, de QUALCOMM INCORPORATED: Un dispositivo de comunicación inalámbrica configurado para comunicaciones inalámbricas, el cual comprende: una memoria configurada para […]