Cálculo de desplazamiento de profundidad adaptativo para una imagen.
Sistema de cálculo de desplazamiento de profundidad adaptativo para una imagen (F) caracterizado porque comprende:
- unos medios de clasificación (2), que proporcionan de entrada un mapa de contorno de la imagen (F), que definen un número de puntos de alta frecuencia (NHIGH), mediante el cómputo de puntos del mapa de contorno con un valor más alto que un umbral de contorno alto predeterminado (EHIGH), que definen un número de puntos de baja frecuencia (NLOW), mediante el cómputo de puntos del mapa de contorno con un valor más bajo que un umbral de contorno bajo predeterminado (ELOW), y que clasifican la imagen (F), comparando el número de puntos de alta frecuencia (NHIGH) con un límite alto predeterminado (THIGH) y comparando el número de puntos de baja frecuencia (NLOW) con un límite bajo predeterminado (TLOW), y
- unos medios de cálculo de desplazamiento de profundidad (3), que calculan un desplazamiento de profundidad (DF) de acuerdo con la mencionada clasificación de la imagen (F), la cual es llevada a cabo por dichos medios de clasificación (2), y en relación al número de puntos de alta frecuencia (NHIGH), en el que el desplazamiento de profundidad (DF) define la profundidad de imagen absoluta (F).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12165333.
Solicitante: VESTEL ELEKTRONIK SANAYI VE TICARET A.S.
Nacionalidad solicitante: Turquía.
Dirección: ORGANIZE SANAYI BÖLGESI 45030 MANISA TURQUIA.
Inventor/es: BASTUG,AHMET, OZER,NURI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H04N13/00 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › Sistemas de video estereoscópico; Sistemas de video multivista; Sus detalles.
PDF original: ES-2517469_T3.pdf
Fragmento de la descripción:
Cálculo de desplazamiento de profundidad adaptativo para una imagen Campo de la técnica
[0001] La presente invención se refiere a procedimientos y sistemas para el procesamiento de un mapa de profundidad de una imagen.
Técnica anterior
[0002] Para aplicaciones de procesamiento de imagen, es una cuestión importante, extraer las características de perspectiva precisas de una imagen. Una de las características más importantes para una imagen, es la profundidad de la imagen, la cual define prácticamente la distancia de los objetos hasta el punto de vista. Cuanto más preciso es el mapa de profundidad de la imagen, más realista será la percepción de perspectiva de la imagen.
[0003] La característica de profundidad de una imagen se ha convertido en algo mucho más importante con el desarrollo de pantallas en 3 dimensiones, las cuales crean una percepción de imagen en 3 dimensiones. Por lo tanto, para reflejar la percepción original de la imagen es necesario un mapa de profundidad veraz de una imagen.
[0004] Para obtener un mapa de profundidad de una imagen, se utilizan varios enfoques ampliamente conocidos. Estos procedimientos, generalmente, extraen información de la profundidad, mediante la identificación de los objetos en la imagen, obteniendo los rasgos sobresalientes de éstos con respecto a otros. Finalmente, se obtiene un mapa de profundidad que se basa en posiciones relativas y/o prominentes de los objetos dentro de la imagen.
[0005] Sin embargo, la extracción de mapa de profundidad relativa no puede definir con exactitud las características de perspectiva de la imagen ya que una imagen total puede tener también una profundidad variable. Por ejemplo, si una secuencia de imágenes (una película), que se obtiene por zum dentro un objeto estático, se muestra en una pantalla en 3 dimensiones mediante el análisis de un procedimiento conocido de extracción de mapa de profundidad, el efecto de zum será más bien percibido como efecto de aumento. Por lo tanto; el movimiento original de la escena se verá afectado por el procesamiento inadecuado. Por lo tanto, una profundidad absoluta debería ser también extraída y utilizada para la reconstrucción de la imagen. La profundidad de imagen absoluta, que se conoce como desplazamiento de profundidad, define la posición de perspectiva de la imagen total, y dicha profundidad es un concepto importante en el procesamiento de imágenes, especialmente para 3 dimensiones, estereoscópicas y/o pantallas de visión múltiple.
[0006] Se conocen varios procedimientos de la técnica anterior relacionados con la extracción de desplazamiento de profundidad. El documento de patente de US 2011/0317766 A1, da a conocer un procedimiento de codificación de profundidad, que comprende la extracción de desplazamiento de profundidad, a partir de valores de profundidad existentes. El procedimiento de US 2011/0317766 A1, extrae un desplazamiento de profundidad absoluta a partir de valores de profundidad calculados u obtenidos. Sin embargo este procedimiento es inadecuado para extraer un desplazamiento de profundidad absoluta para una imagen.
[0007] Otro documento de patente US 2011/0157160 A1, revela un procedimiento de generación de imágenes en 3 dimensiones, en el cual se realiza una asignación de desplazamiento de profundidad de acuerdo con las diferentes profundidades existentes de la imagen y valores de profundidad permisibles. Dentro del procedimiento de la US 2011/0157160 A1, el desplazamiento de profundidad se obtiene de acuerdo con los valores de profundidad mínimos máximos de la imagen y el rango de valores de profundidad permisibles. Sin embargo, el procedimiento del documento no especifica un procedimiento para ajustar adecuadamente el desplazamiento de profundidad dentro del rango permitido.
Breve descripción de la invención
[0008] La presente invención comprende un sistema y un procedimiento para el cálculo del desplazamiento de profundidad adaptativo para una imagen, en los que el mapa de contorno de la imagen se analiza con el fin de contar el número de valores de puntos de alta frecuencia que son más altos que un umbral predeterminado y el recuento de número de los valores de puntos de baja frecuencia que son inferiores a un umbral predeterminado. El número de puntos de alta y baja frecuencia, se comparan con los límites predeterminados para clasificar la imagen, y se calcula un desplazamiento de profundidad de acuerdo con dicha clasificación. La invención proporciona un ajuste preciso de la profundidad para una imagen con el fin de obtener una verdadera percepción de perspectiva.
[0009] Las realizaciones de la invención proporcionan aproximaciones exitosas para el cálculo preciso del desplazamiento de profundidad para una imagen, ajustando la profundidad total de la imagen de acuerdo con el citado desplazamiento de profundidad.
[0010] Con el sistema y el procedimiento de la presente invención, se consigue un cálculo del desplazamiento de profundidad adaptativo con el fin de obtener la verdadera percepción de perspectiva de la imagen total, lo que aumenta la comodidad del espectador.
Objeto de la invención
[0011] El objeto principal de la invención es proporcionar un procedimiento y un sistema de cálculo del desplazamiento de profundidad adaptativo para una imagen.
[0012] Otro objeto de la invención es proporcionar un procedimiento y un sistema de cálculo del desplazamiento de profundidad adaptativo para una imagen que extrae la profundidad absoluta de una imagen.
[0013] Otro objeto de la invención es proporcionar un procedimiento y un sistema robustos para el cálculo del desplazamiento de profundidad adaptativo para una imagen.
[0014] Otro objeto de la invención es proporcionar un procedimiento y un sistema de cálculo de desplazamiento de profundidad adaptativo, el cual proporciona cambios de profundidad suaves para una secuencia de imágenes.
Descripción de los dibujos
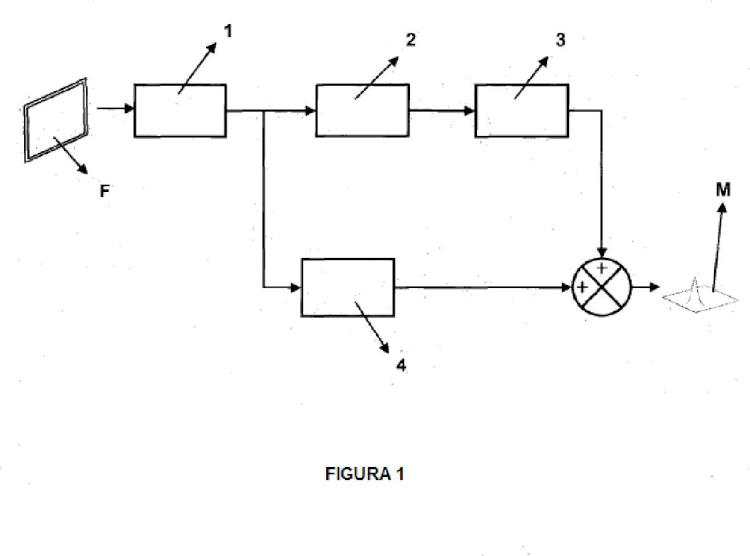
[0015] La figura 1 muestra una realización de un sistema de cálculo del desplazamiento de profundidad adaptativo de la presente invención.
[0016] Las referencias en las figuras pueden presentar los siguientes significados;
Imagen (F)
Mapa de profundidad (M)
Medios de mapa de contorno (1)
Medios de clasificación (2)
Medios de cálculo del desplazamiento de profundidad (3)
Medios de mapa de profundidad (4)
Descripción detallada de la invención
[0017] El desplazamiento de profundidad (Df) es un parámetro importante, especialmente en el procesamiento de imágenes tridimensionales. El desplazamiento de profundidad (Df) define la posición perspectiva absoluta de la imagen (F), incluyendo todos los elementos de la imagen (F).
[0018] La presente invención proporciona unos novedosos procedimiento y sistema de cálculo del desplazamiento de profundidad (Df) adaptativo para una imagen (F). Con el procedimiento y el sistema de la invención, el mapa de profundidad de la imagen (F), puede ser modificado a fin de crear una percepción de perspectiva original de una escena con una imagen (Df).
[0019] Los sistemas de la técnica anterior, los cuales son capaces de adquirir o extraer (estimación) un mapa de profundidad de una imagen (F), comprenden medios de mapa de profundidad (4), que bien leen la información de profundidad incrustada dentro de unos datos de la imagen (F) o extraen un mapa de profundidad, usando un mapa de contorno creado (estimado), mediante medios de mapa de contorno (2). Si el mapa de profundidad se extrae utilizando dicho mapa de contorno, es muy probable que se cree un mapa de profundidad relativa y el desplazamiento de profundidad (Df) no pueda ser adquirido.
[0020] Una realización ejemplar del sistema de la invención se da en la figura 1. El sistema puede incluir, al menos, unos medios de mapa de contorno (1) ya para adquirir o bien extraer un mapa de contorno de la imagen (F). Los medios de mapa de contorno (1) pueden calcular el mapa de contorno de la imagen (F), utilizando cualquier procedimiento conocido de la técnica anterior, tales como el detector Canny o el operador Sobel. Alternativamente, el sistema de la invención puede utilizar el mapa de contorno inmediatamente adquirido, cuyos datos pueden estar comprendidos dentro de la imagen (F). El mapa de contorno de la imagen (F) puede ser creado a la misma resolución de la imagen (F). Preferiblemente, el mapa de contorno se crea dividiendo la imagen (F) en bloques no solapados y haciendo corresponder cada bloque de la imagen (F) a un punto del mapa de contorno. El cálculo orientado a bloques reduce significativamente la complejidad de cálculo y es también útil para el sistema y procedimiento de la invención.
[0021] El sistema de... [Seguir leyendo]
Reivindicaciones:
1. Sistema de cálculo de desplazamiento de profundidad adaptativo para una imagen (F) caracterizado porque comprende:
- unos medios de clasificación (2), que proporcionan de entrada un mapa de contorno de la imagen (F), que definen un número de puntos de alta frecuencia (Nhigh), mediante el cómputo de puntos del mapa de contorno con un valor más alto que un umbral de contorno alto predeterminado (Ehigh), que definen un número de puntos de baja frecuencia (Nlow), mediante el cómputo de puntos del mapa de contorno con un valor más bajo que un umbral de contorno bajo predeterminado (Elow), y que clasifican la imagen (F), comparando el número de puntos de alta frecuencia (Nhigh) con un límite alto predeterminado (Thigh) y comparando el número de puntos de baja frecuencia (Nlow) con un límite bajo predeterminado (Tlow), y
- unos medios de cálculo de desplazamiento de profundidad (3), que calculan un desplazamiento de profundidad (Df) de acuerdo con la mencionada clasificación de la imagen (F), la cual es llevada a cabo por dichos medios de clasificación (2), y en relación al número de puntos de alta frecuencia (Nhigh), en el que el desplazamiento de profundidad (Df) define la profundidad de imagen absoluta (F).
2. Sistema de cálculo de desplazamiento de profundidad adaptativo de acuerdo con la reivindicación 1 en el que:
- si dicho número de puntos de alta frecuencia (Nhigh) es superior al citado límite alto (Thigh), los mencionados medios de clasificación (2) clasifican la imagen como de "alta frecuencia";
- si dicho número de puntos de baja frecuencia (Nlow) es superior al citado límite bajo (Tlow), los mencionados medios de clasificación (2) clasifican la imagen como de " baja frecuencia";
- si a la vez, dicho número de puntos de alta frecuencia (Nhigh) es superior al citado límite alto (Thigh) y dicho número de puntos de baja frecuencia (Nlow) es superior al citado límite bajo (Tlow), los mencionados medios de clasificación (2) clasifican la imagen como "a la vez de alta y baja frecuencia";
- si a la vez, dicho número de puntos de alta frecuencia (Nhigh) es inferior al citado límite alto (Thigh) y dicho número de puntos de baja frecuencia (Nlow) es inferior al citado límite bajo (Tlow), los mencionados medios de clasificación (2) clasifican la imagen como "ni de alta ni de baja frecuencia".
3. Sistema de cálculo de desplazamiento de profundidad adaptativo de acuerdo con la reivindicación 2, en el que:
- si la imagen se clasifica como de "alta frecuencia", los citados medios de cálculo (3), calculan el desplazamiento de profundidad (Df) utilizando la ecuación (1)
Df = Chx(Nhigh- Thigh) (1)
- si la imagen se clasifica como de "baja frecuencia", los citados medios de cálculo (3), calculan el desplazamiento de profundidad (Df), utilizando la ecuación (2)
Df = Chx(Nhigh- Thigh) - Li (2)
- si la imagen se clasifica como de "alta y baja frecuencia", los citados medios de cálculo (3) calculan el desplazamiento de profundidad (Df), utilizando la ecuación (3).
Df = Chx(Nhigh- Thigh) - L2 (3)
donde, Ch es un coeficiente de desplazamiento de profundidad, L1 es un primer desplazamiento de baja frecuencia y siendo L2 un segundo desplazamiento de baja frecuencia.
4. Sistema de cálculo de desplazamiento de profundidad adaptativo de acuerdo con la reivindicación 1, en el que el citado sistema comprende adicionalmente medios de alisado que ponderan un desplazamiento de profundidad calculado (Df) con un desplazamiento de profundidad calculado previamente (Dfp) de una imagen previa (Fp), para así calcular un desplazamiento de profundidad ponderado (Dw).
5. Sistema de cálculo de desplazamiento de profundidad adaptativo de acuerdo con la reivindicación 4, en el que la citada ponderación se lleva a cabo utilizando la ecuación (4).
Dw = (ax Df) + ((1-a)x Dpf ) (4)
donde a es el parámetro de ponderación.
6. Sistema de cálculo de desplazamiento de profundidad adaptativo de acuerdo con la reivindicación 1, en el que el citado sistema comprende adicionalmente medios de adaptación de tamaño por pasos para alcanzar un
desplazamiento de profundidad final (Dff), añadiendo pasos predeterminados a un desplazamiento de profundidad (Dpf) de una imagen previa (Fp), usando la ecuación (5)
Dff = Dpf + ¡jxsign (Dw - Dpf) (5)
donde sign, define la función de signo matemático estándar y p define el tamaño del paso.
7. Procedimiento de cálculo de desplazamiento de profundidad adaptativo para una imagen (F), caracterizado porque comprende las etapas de:
- introducir un mapa de contorno de la imagen (F);
- definir un número de puntos de alta frecuencia (Nhigh), mediante el cómputo de puntos del mapa de contorno que tienen un valor más alto que un umbral de contorno alto predeterminado (Ehigh);
- definir un número de puntos de baja frecuencia (Nlow), mediante el cómputo de puntos del mapa de contorno que tienen un valor más bajo que un umbral de contorno bajo predeterminado (Elow);
- clasificar la imagen (F), comparando el número de puntos de alta frecuencia (Nhigh) con un límite alto predeterminado (Thigh) y comparando el número de puntos de baja frecuencia (Nlow) con un límite bajo predeterminado (Tlow),
- calcular el desplazamiento de profundidad de acuerdo con la mencionada clasificación de la imagen (F) y en relación al número de puntos de alta frecuencia (Nhigh), en el que el desplazamiento de profundidad (Df) define la profundidad de imagen absoluta.
8. Procedimiento de cálculo de desplazamiento de profundidad adaptativo de acuerdo con la reivindicación 7 en el que
- la imagen (F) se clasifica como de "alta frecuencia", si el citado número de puntos de alta frecuencia (Nhigh) es más alto que el mencionado límite alto (Thigh);
- la imagen (F) se clasifica como de "baja frecuencia", si el citado número de puntos de baja frecuencia (Nlow) es más alto que el mencionado límite bajo (Tlow);
- la imagen (F) se clasifica como "a la vez de alta y de baja frecuencia", si, a la vez, el número de puntos de alta frecuencia (Nhigh) es más alto que el mencionado límite alto (Thigh) y el mencionado número de puntos de baja frecuencia (Nlow) es más alto que el mencionado límite bajo (Tlow);
- la imagen (F) se clasifica como "ni de alta ni de baja frecuencia" si, a la vez, el número de puntos de alta frecuencia (Nhigh) es más bajo que el mencionado límite alto (Thigh) y el mencionado número de puntos de baja frecuencia (Nlow) es más bajo que el mencionado límite bajo (Tlow).
9. Procedimiento de cálculo de desplazamiento de profundidad adaptativo de acuerdo con la reivindicación 8, en el que
- si la imagen se clasifica como de "alta frecuencia", el desplazamiento de profundidad (Df) se calcula utilizando la ecuación (1)
Df = Chx(Nhigh- Thigh) (1)
- si la imagen se clasifica como de "baja frecuencia", el desplazamiento de profundidad (Df) se calcula utilizando la ecuación (2)
Df = Chx(Nhigh- Thigh) - Li (2)
- si la imagen se clasifica como "a la vez de alta y baja frecuencia", el desplazamiento de profundidad (Df) se calcula utilizando la ecuación (3)
Df = Chx(Nhigh- Thigh) - L2 (3)
donde, Ch es un coeficiente de desplazamiento de profundidad, L1, es un primer desplazamiento de baja frecuencia y l_2, es un segundo desplazamiento de baja frecuencia.
10. Procedimiento de cálculo de desplazamiento de profundidad adaptativo de acuerdo con la reivindicación 7, caracterizado porque dicho procedimiento comprende adicionalmente una etapa de ponderación de un desplazamiento de profundidad calculado (Df) con un desplazamiento de profundidad calculado previamente (Dfp) de una imagen previa (Fp), para así calcular un desplazamiento de profundidad ponderado (Dw).
11. Procedimiento de cálculo de desplazamiento de profundidad adaptativo de acuerdo con la reivindicación 10, en el que la citada ponderación se lleva a cabo utilizando la ecuación (4)
Dw = (ax Df) + ((1-a)x Dpf ) (4)
donde a es el parámetro de ponderación.
12. Procedimiento de cálculo de desplazamiento de profundidad adaptativo de acuerdo con la reivindicación 8,
caracterizado porque dicho procedimiento comprende adicionalmente la etapa de adaptación de tamaño por pasos para alcanzar un desplazamiento de profundidad final (Dff), añadiendo pasos predeterminados a un desplazamiento de profundidad (Dpf) de una imagen previa (Fp), usando la ecuación (5)
1 0 Dff = Dpf + ¡jxsign (Dw - Dpf) (5)
donde sign, define la función de signo matemático estándar y p define el tamaño del paso.
Patentes similares o relacionadas:
SISTEMA PARA ACOPLAR UN DISPOSITIVO DE DIGITALIZACIÓN DE IMÁGENES A UN INSTRUMENTO ÓPTICO, del 21 de Noviembre de 2019, de Spotlab, S.L: 1. Sistema para acoplar un dispositivo de digitalización de imágenes, que comprende al menos una lente, a un instrumento óptico que comprende […]
Seguimiento tridimensional de un dispositivo de control del usuario en un volumen, del 30 de Octubre de 2019, de zSpace, Inc: Un método que comprende: recibir múltiples imágenes capturadas de al menos un punto visualmente indicado de un dispositivo de control del usuario […]
 Procedimiento de compresión de información de vídeo, del 30 de Octubre de 2019, de Broadmedia GC Corporation: Un procedimiento de compresión de información de vídeo, que comprende las etapas de:
- proyectar puntos de una imagen siguiente en puntos proyectados […]
Procedimiento de compresión de información de vídeo, del 30 de Octubre de 2019, de Broadmedia GC Corporation: Un procedimiento de compresión de información de vídeo, que comprende las etapas de:
- proyectar puntos de una imagen siguiente en puntos proyectados […]
Predicción residual avanzada simplificada para la 3d-hevc, del 14 de Junio de 2019, de QUALCOMM INCORPORATED: Un procedimiento de codificación de datos de vídeo, el procedimiento que comprende: determinar que un bloque actual (Actual) de una primera vista se codifica utilizando […]
Generación y codificación de imágenes integrales residuales, del 22 de Mayo de 2019, de Orange: Procedimiento de codificación de al menos una imagen integral actual (IIj) capturada por un dispositivo de captura de imágenes, que comprende las etapas siguientes: […]
Dispositivo de visualización auto-estereoscópico, del 27 de Marzo de 2019, de KONINKLIJKE PHILIPS N.V: Un dispositivo de visualización auto-estereoscópico que comprende: un medio de formación de la imagen que tiene una matriz bidimensional de píxeles de visualización […]
Dispositivo móvil de visualización 3D sin gafas, procedimiento de configuración del mismo, y procedimiento de uso del mismo, del 20 de Marzo de 2019, de SAMSUNG ELECTRONICS CO., LTD.: Un dispositivo de visualización tridimensional (3D) sin gafas que comprende: un dispositivo de visualización que comprende un monitor […]
Síntesis de visualización en vídeo 3D, del 6 de Marzo de 2019, de QUALCOMM INCORPORATED: Un procedimiento de descodificación de datos de vídeo de múltiples visualizaciones, el procedimiento que comprende: determinar si un índice […]