TRANSPORTADOR CON ESTIMADOR DE PROBABILIDADES.
Sistema transportador (20), que comprende:
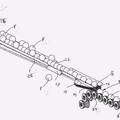
una superficie (26) de transporte para transportar una serie de artículos;
por lo menos un sensor (30, 31, 32, 34) para detectar los artículos sobre dicha superficie (26) de transporte;
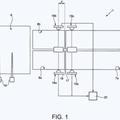
un control (36) sensible a dicho por lo menos un sensor (30, 31, 32, 34), estableciendo dicho control (36) por lo menos un parámetro de artículos individuales y controlando dicha superficie (26) de transporte en función de dicho por lo menos un parámetro de los artículos; comprendiendo dicho control (36) un ordenador (64) y un programa para dicho ordenador (64), caracterizado porque dicho programa define por lo menos un estimador de probabilidades, en el que dicho control (36) determina el por lo menos un parámetro de los artículos por lo menos en parte mediante dicho por lo menos un estimador de probabilidades
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2004/032805.
Solicitante: DEMATIC CORP..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 507 PLYMOUTH AVENUE, NE,GRAND RAPIDS, MI 49505.
Inventor/es: ZEITLER, DAVID, W., DOANE,MARTIN,R, MILLIMAN,DOUGLAS,L.
Fecha de Publicación: .
Fecha Concesión Europea: 10 de Marzo de 2010.
Clasificación Internacional de Patentes:
- B65G43/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 43/00 Dispositivos de control, p. ej. de seguridad, de alarma, de corrección de errores. › Dispositivos de control accionados por la alimentación, el desplazamiento o la descarga de objetos o materiales.
- B65G43/10 B65G 43/00 […] › Control secuencial de transportadores que funcionan en combinación.
- B65G47/31 B65G […] › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › haciendo variar las velocidades relativas de los transportadores en serie.
Clasificación PCT:
- B65G43/08 B65G 43/00 […] › Dispositivos de control accionados por la alimentación, el desplazamiento o la descarga de objetos o materiales.
Clasificación antigua:
- B65G43/08 B65G 43/00 […] › Dispositivos de control accionados por la alimentación, el desplazamiento o la descarga de objetos o materiales.
Fragmento de la descripción:
Transportador con estimador de probabilidades.
Antecedentes de la invención
La presente invención se refiere a un sistema transportador, que comprende una superficie de transporte para transportar una serie de artículos; por lo menos un sensor para detectar los artículos sobre dicha superficie de transporte; un control sensible a dicho por lo menos un sensor, estableciendo dicho control por lo menos un parámetro de artículos individuales y controlando dicha superficie de transporte en función de dicho por lo menos un parámetro de los artículos; comprendiendo dicho control un ordenador y un programa para dicho ordenador. Por otra parte, esta invención se refiere a un método de inducción de artículos con dicho sistema de transporte.
A partir de la solicitud de patente US 2001/035332 ya se conoce un sistema de transporte comparable.
La sección de inducción de un sistema transportador se refiere en general a la parte del sistema de transporte en la que se inducen, o inician, artículos en el sistema de clasificación de transporte. La sección de inducción típicamente realiza la función de proporcionar las separaciones correctas entre paquetes, u otros artículos que se desplacen sobre el sistema de transporte, de manera que los paquetes se puedan clasificar para su correcta distribución. El ajuste de la separación de los artículos influye en el rendimiento del sistema de transporte, que con frecuencia es un factor muy significativo comercialmente. Reduciendo las separaciones entre artículos sobre el sistema de transporte se incrementa el número de artículos que se puede colocar sobre el sistema de transporte en un instante de tiempo determinado. Al poder colocar más artículos sobre el sistema de transporte en un instante de tiempo determinado, se mueven más artículos durante un periodo de tiempo determinado, incrementándose de este modo el rendimiento del sistema de transporte.
El ajuste de la separación de los artículos influye también en las funciones de clasificación del sistema de transporte. Cuando el sistema de transporte funciona de manera que clasifica los artículos que están siendo transportados, los sistemas de transporte de la técnica anterior con frecuencia han usado zapatas de empuje u otros medios de desviación para empujar los artículos fuera de un transportador principal sobre uno o más transportadores secundarios. Para que estas zapatas de empuje clasifiquen los paquetes correctamente, es importante que se proporcione el suficiente espacio entre los artículos de manera que los empujadores no empujen de forma accidental contra otros artículos mientras se encuentran en el proceso de desviar un segundo artículo.
Por lo tanto, las funciones de clasificación del sistema de transporte están a favor de proporcionar una cierta cantidad de separación entre artículos mientras que las consideraciones de rendimiento están a favor de reducir esta separación al mínimo espacio posible. La parte de inducción del sistema de transporte debería poder producir de forma consistente y precisa separaciones que fueran simplemente lo suficientemente grandes para adaptarse a los requisitos de separación de la sección de clasificación de sistema de transporte con la mayor frecuencia posible.
La creación de separaciones en sistemas de transporte de la técnica anterior puede verse perjudicada ya que estos sistemas de transporte de la técnica anterior no pueden determinar la posición de artículos sobre los transportadores con la suficiente precisión. Por ejemplo, en algunos sistemas de transporte de la técnica anterior, la posición del artículo se determina detectando el paso del artículo por un único fotodetector posicionado al lado del transportador. Cuando el artículo supera el fotodetector único, su posición se determina por la distancia que se ha movido la cinta transportadora desde que el artículo había sido detectado. La determinación de la distancia que se había movido la cinta transportadora se lleva a cabo frecuentemente por medio de un codificador que mide la cantidad de rotaciones del motor que accionaba la cinta transportadora o uno que mide el movimiento de la cinta transportadora directamente. Debido a imprecisiones en la medición, deslizamientos, y otros factores, este cálculo de la posición del artículo sobre el transportador presenta una incertidumbre importante. Esta incertidumbre de la posición del artículo sobre el transportador hace que el control de las separaciones creadas en sistemas de inducción de la técnica anterior resulte difícil.
Por lo tanto, considerando las desventajas mencionadas de la técnica anterior, puede observarse la necesidad de un sistema de inducción que mejore la precisión y consistencia de las separaciones creadas entre artículos.
Resumen de la invención
Un sistema transportador y un método de transporte de artículos, según un aspecto de la invención, incluye proporcionar una superficie de transporte para transportar una serie de artículos y por lo menos un sensor para detectar los artículos sobre la superficie de transporte. Se proporciona un control que establece por lo menos un parámetro para cada uno de los artículos y controla la superficie de transporte en función del por lo menos un parámetro de cada uno de los artículos. El control incluye un microordenador y un programa para el microordenador. El programa incluye por lo menos un estimador de probabilidades. El control determina el por lo menos un parámetro de cada uno de los artículos por lo menos en parte mediante el por lo menos un estimador de probabilidades.
Un sistema transportador y un método de transporte de artículos, según otro aspecto de la invención, incluye proporcionar una superficie de transporte para transportar una serie de artículos y por lo menos un sensor para detectar los artículos sobre una superficie de transporte. Se proporciona un control que es sensible al por lo menos un sensor y establece por lo menos un parámetro de cada uno de los artículos. El control controla la superficie de transporte en función del por lo menos un parámetro de cada uno de los artículos. El control incluye un microordenador y un programa para el microordenador. El control asigna un estimador de probabilidades a artículos individuales. El control estima el por lo menos un parámetro para un artículo particular usando el estimador de probabilidades asignado a ese artículo.
Un subsistema de inducción para un sistema de clasificación transportador y un método de ajuste de separación de artículos, según otro aspecto de la invención, incluye proporcionar una pluralidad de superficies de transporte en tándem, siendo controlable individualmente una velocidad de cada una de las superficies de transporte. Se proporciona por lo menos un sensor de imágenes de exploración para detectar artículos sobre por lo menos una de las superficies de transporte. Se proporciona un control que es sensible al por lo menos un sensor de imágenes de exploración para controlar las velocidades de las superficies de transporte. El control procesa una salida del por lo menos un sensor de imágenes de exploración utilizando la estimación de probabilidades.
Un subsistema de inducción para un sistema de clasificación transportador y un método de ajuste de separaciones de artículos, según otro aspecto de la invención, incluye proporcionar una pluralidad de superficies de transporte en tándem, siendo controlable individualmente una velocidad de cada superficie de transporte. Se proporciona por lo menos un sensor de imágenes de exploración para detectar artículos sobre por lo menos una de las superficies de transporte. Se proporciona un control que es sensible al por lo menos un sensor de imágenes de exploración para controlar las velocidades de las superficies de transporte de manera que establece separaciones controladas entre artículos. El control asigna un estimador de probabilidades a artículos individuales detectados con el por lo menos un sensor de imágenes de exploración para establecer por lo menos un parámetro de cada uno de los artículos.
Un subsistema de inducción para un sistema de clasificación transportador y un método de ajuste de separación de artículos, según otro aspecto de la invención, incluye proporcionar una pluralidad de superficies de transporte en tándem, siendo controlable individualmente una velocidad de cada superficie de transporte. Se proporciona por lo menos un sensor para detectar artículos sobre por lo menos una de las superficies de transporte. Se proporciona un control que es sensible al por lo menos un sensor para controlar las velocidades de la superficie de transporte...
Reivindicaciones:
1. Sistema transportador (20), que comprende:
2. Sistema transportador de la reivindicación 1, en el que dicho por lo menos un estimador de probabilidades comprende un estimador Bayesiano (79).
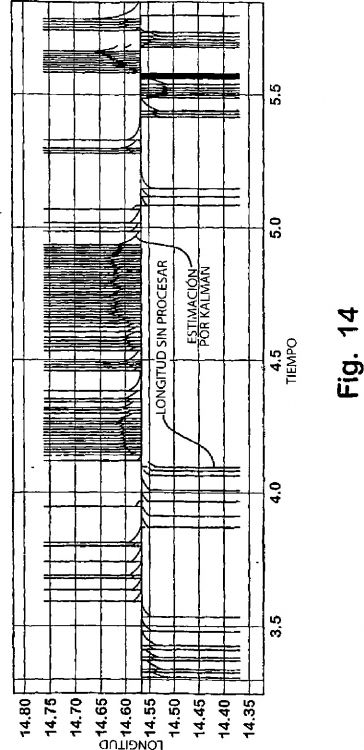
3. Sistema transportador de la reivindicación 2, en el que dicho estimador Bayesiano (79) comprende un filtro (81) de Kalman.
4. Sistema transportador de la reivindicación 1, en el que dicho por lo menos un parámetro comprende por lo menos uno seleccionado de entre posición del artículo y rapidez del artículo.
5. Sistema transportador de la reivindicación 1, en el que dicho por lo menos un parámetro comprende una pluralidad de parámetros, comprendiendo dichos parámetros la posición del artículo, la longitud del artículo y la rapidez del artículo.
6. Sistema transportador de la reivindicación 1, en el que dicho por lo menos un estimador de probabilidades comprende una pluralidad de dichos estimadores de probabilidades, asignado cada uno de ellos a uno individual de los artículos.
7. Sistema transportador de la reivindicación 1, en el que dicho por lo menos un sensor (30, 31, 32, 34) comprende por lo menos un sensor (30, 32, 34) de imágenes de exploración.
8. Sistema transportador de la reivindicación 7, en el que dicho control (36) procesa una salida de dicho por lo menos un sensor (30, 32, 34) de formación de imágenes con dicho por lo menos un estimador de probabilidades.
9. Sistema transportador de la reivindicación 8, en el que dicho por lo menos un estimador de probabilidades incluye lógica (104) de decisión aplicada a dicha salida de dicho por lo menos un sensor (30, 32, 34) de imágenes de exploración.
10. Sistema transportador de la reivindicación 9, en el que dicha lógica (104) de decisión compara bordes delanteros detectados (L) y bordes traseros (T) de artículos para identificar por lo menos uno seleccionado de entre artículos ficticios y separaciones ficticias entre artículos.
11. Sistema transportador de la reivindicación 7, en el que dicho por lo menos un sensor (30, 32, 34) de imágenes de exploración comprende por lo menos uno seleccionado de entre una matriz lineal de fotosensores, una cámara de exploración lineal y un sensor de radar.
12. Sistema transportador de la reivindicación 6, en el que dicha superficie (26) de transporte está constituida por una pluralidad de porciones (26) de superficie de transporte en tándem, siendo controlables individualmente las velocidades de dichas porciones (26) de la superficie de transporte, y en donde dicho control (36) define una pluralidad de algoritmos (112) de ajuste de separaciones con realimentación, estando destinado cada uno de dichos algoritmos (112) de ajuste de separaciones con realimentación entre porciones (26) de superficie de transporte adyacentes para ajustar velocidades relativas de dichas porciones (26) de superficie de transporte adyacentes en función del por lo menos un parámetro de los artículos.
13. Sistema transportador de la reivindicación 12, en el que dichos algoritmos (112) de ajuste de separaciones con realimentación actúan sobre salidas de dichos estimadores de probabilidades asignados a artículos sobre dichas porciones (26) de superficies de transporte.
14. Sistema transportador de la reivindicación 13, en el que dicho control ajusta posiciones relativas de artículos con dichos algoritmos (112) de ajuste de separaciones con realimentación comenzando con un par de porciones (26) de superficie de transporte adyacentes y progresando en cascada hacia pares adyacentes de porciones (26) de superficie de transporte adyacentes.
15. Sistema transportador de la reivindicación 14, en el que dicho control (36) ajusta posiciones relativas de artículos comenzando con un par, situado aguas abajo, de porciones (26) de superficie de transporte adyacentes que se encuentran aguas abajo con respecto al movimiento de los artículos y progresando en cascada aguas arriba con respecto a movimiento de los artículos a través de pares adyacentes de porciones (26) de superficie de transporte adyacentes.
16. Sistema transportador de la reivindicación 15, que incluye un algoritmo (112) de ajuste de separaciones con realimentación entre una de dichas porciones (26) de superficie de transporte adyacentes de aguas abajo y una porción (26) de superficie de transporte de velocidad fija que está aguas abajo con respecto a dichas porciones (26) de superficie de transporte adyacentes de aguas abajo.
17. Sistema transportador de la reivindicación 7, en el que dicha superficie (26) de transporte comprende una pluralidad de cintas transportadoras (42, 44, 46, 48), siendo controlables las velocidades de dichas cintas transportadoras (42, 44, 46, 48) y en donde dicho por lo menos un sensor (30, 32, 34) de imágenes de exploración detecta por lo menos un parámetro de artículos individuales, detectando artículos dicho por lo menos un sensor (30, 32, 34) de imágenes de exploración en solamente una porción de dichas cintas transportadoras (42, 44, 46, 48) que son adyacentes a dicho por lo menos un sensor (30, 32, 34) de imágenes de exploración, controlando dicho control posiciones relativas de artículos sobre otras cintas transportadoras (42, 44, 46, 48) que no son adyacentes a dicho sensor (30, 32, 34) de imágenes de exploración basándose en una salida de dicho por lo menos un estimador de probabilidades.
18. Sistema transportador de la reivindicación 17, en el que dicho por lo menos un sensor de imágenes de exploración comprende por lo menos dos sensores (30, 32, 34) de imágenes de exploración.
19. Sistema transportador de la reivindicación 18, en el que dichos por lo menos dos sensores (30, 32, 34) de imágenes de exploración están separados entre sí, actuando dicho control (36) sobre dicha salida del por lo menos un estimador de probabilidades para un artículo mientras ese artículo está entre dichos por lo menos dos sensores (30, 32, 34) de formación de imágenes.
20. Sistema transportador de la reivindicación 17, en el que dicho control (36)controla posiciones relativas de artículos o bien con respecto a posiciones de otros artículos o bien con respecto a una posición de una porción de un sistema de clasificación transportador.
21. Método de inducción de artículos con un sistema transportador (20), comprendiendo dicho método:
Patentes similares o relacionadas:
Método de transporte, del 8 de Mayo de 2019, de DAIFUKU CO., LTD.: Método de transporte para un objeto de transporte , siendo transportado el objeto de transporte a través de una trayectoria de transporte […]
Máquina de embalaje y procedimiento para la operación de una máquina de embalaje, del 16 de Abril de 2019, de SIG TECHNOLOGY AG: Máquina de embalaje con - por lo menos dos estaciones de embalaje dispuestas secuencialmente en orden consecutivo, en donde cada estación de embalaje presenta una cinta […]
Aparato y método para articular embalados helicoidalmente, del 25 de Abril de 2018, de Oakbridge Investments Limited: Un aparato de empaquetado que comprende: un aplicador de material de embalaje para embalar helicoidalmente artículos (A); un transportador de […]
Unidad y método para formar una capa de lotes de grupos de artículos, del 7 de Febrero de 2018, de Gebo Packaging Solutions Italy SRL: Una unidad para formar una capa de al menos un lote que tiene una longitud L de grupos de artículos, que comprende: - un primer trasportador adaptado […]
Dispositivo de transferencia de artículos entre máquinas de desplazamiento intermitente y de desplazamiento continuo e instalación de acondicionamiento correspondiente, del 12 de Julio de 2017, de SERAC GROUP: Dispositivo de transferencia de artículos entre una primera máquina que funciona con un desplazamiento intermitente de los artículos según un primer […]
Aparato y método para la fabricación de paneles, del 6 de Julio de 2016, de PRISMA S.R.L.: Aparato para la fabricación de un panel que comprende al menos una capa externa sobre la que están dispuestos elementos estructurales […]
 Dispositivo para la separación de frutas, del 24 de Febrero de 2016, de MAF AGROBOTIC: Procedimiento de separación implementado en un dispositivo de separación utilizado con un equipo de manipulación de frutas que comprende unos soportes […]
Dispositivo para la separación de frutas, del 24 de Febrero de 2016, de MAF AGROBOTIC: Procedimiento de separación implementado en un dispositivo de separación utilizado con un equipo de manipulación de frutas que comprende unos soportes […]
 Unidad y método para formar una capa de lotes de grupos de artículos, del 17 de Febrero de 2016, de Gebo Packaging Solutions Italy SRL: Una unidad para formar una capa de al menos un primer lote (2a; 2b, ..., 2n) y de un segundo lote (2b; 2a, ...,2n) de los respectivos primeros […]
Unidad y método para formar una capa de lotes de grupos de artículos, del 17 de Febrero de 2016, de Gebo Packaging Solutions Italy SRL: Una unidad para formar una capa de al menos un primer lote (2a; 2b, ..., 2n) y de un segundo lote (2b; 2a, ...,2n) de los respectivos primeros […]