Sistema y método de detección óptica para discriminación de plantas.
Un sistema de detección para discriminar plantas que comprende:
una fuente de luz que comprende tres o más láseres, cada láser estando dispuesto para producir un haz deláser pulsado de una longitud de onda diferente, un combinador colimador y multiplexor por división detiempo WDM, para combinar los haces de luz pulsada láser de los tres o más láseres en un haz de luzcombinado colimado y multiplexado por división de tiempo; un divisor para dividir el haz de luz combinadocolimado y multiplexado por división de tiempo en una pluralidad de haces de luz teniendo cada uno deellos las diferentes longitudes de onda de tal modo que los haces de luz son dirigidos a distintas áreas nosuperpuestas en un campo de visión;
un detector para medir claramente la reflectancia de cada una de las distintas áreas no superpuestas encada una de las distintas longitudes de onda; y
un identificador para identificar al menos un tipo de planta en el campo de visión a partir de la reflectanciamedida en cada una de las longitudes de onda en cada una de las distintas áreas no superpuestas..
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/AU2007/001075.
Solicitante: PHOTONIC DETECTION SYSTEMS PTY LTD.
Nacionalidad solicitante: Australia.
Dirección: 40 CHURCHILL AVENUE SUBIACO, WA 6008 AUSTRALIA.
Inventor/es: ALAMEH,KAMAL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01M21/04 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01M CAPTURA O CAZA DE ANIMALES, AHUYENTADORES PARA ANIMALES (dispositivos para la captura de enjambres o zánganos A01K 57/00; pesca A01K 69/00 - A01K 97/00; biocidas, pesticidas, productos que atraen o repelen a los animales A01N ); APARATOS DE DESTRUCCION DE ANIMALES O PLANTAS PERJUDICIALES. › A01M 21/00 Aparatos para la destrucción de vegetales indeseables, p. ej. malas hierbas (lucha contra la vegetación indeseable en carreteras o vías férreas E01H 11/00). › Aparatos para la destrucción por medio de vapor, productos químicos, fuego o electricidad.
- A01M7/00 A01M […] › Adaptaciones o disposiciones especiales de los aparatos de pulverización de líquidos para los fines a los que se refiere la presente subclase.
- G01N21/25 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 21/00 Investigación o análisis de los materiales por la utilización de medios ópticos, es decir, utilizando rayos infrarrojos, visibles o ultravioletas (G01N 3/00 - G01N 19/00 tienen prioridad). › Color; Propiedades espectrales, es decir, comparación del efecto del material sobre la luz para varias longitudes de ondas o varias bandas de longitudes de ondas diferentes.
- G01N21/35 G01N 21/00 […] › utilizando luz infrarroja (G01N 21/39 tiene prioridad).
- G01N21/39 G01N 21/00 […] › utilizando lasers con longitud de onda regulable.
- G01N21/55 G01N 21/00 […] › Reflexión especular.
PDF original: ES-2395062_T3.pdf
Fragmento de la descripción:
Sistema y método de detección óptica para discriminación de plantas Campo de la Invención [0001] La presente invención se refiere a dispositivos ópticos y uso de dispositivos ópticos en un detector para identificar objetos.
Antecedentes de la Invención 0002] Existen muchísimas necesidades de sistemas detectores que puedan discriminar objetos. Tal discriminación puede ser, por ejemplo, discriminación de plantas para fines hortícolas, detección de objetos extraños en procesos industriales y en sistemas de clasificación, por nombrar sólo unos pocos.
Un área particular de interés está en la descriminación de organismos nocivos en cultivos. Los organismos nocivos pueden incluir insectos o malas hierbas. En el área de control de malas hierbas es práctica común pulverizar herbicidas en diferentes momentos en el ciclo de cultivación de una cosecha. Preocupaciones medioambientale y costes agrarios incrementados han llevado a una evaluación crítica del uso de productos químicos en agricultura. Algunas prácticas de cultivo han surgido que permiten la aplicación en sitios específicos de químicos tales como herbicidas, de ahí limitando el uso de agroquímicos. La capacidad de identificar con precisión y/o diferenciar plantas en tiempo real y a velocidades comunes de funcionamiento es considerado como un deseo sin satisfacer/no cubierto unmet en agricultura.
Un sistema discriminatorio de vegetación conocido como "el buscador de malas hierbas Patchen " se discrimina al medir el índice de vegetación (VI) definido como el coeficiente de reflexión en longitudes de onda de infrarojos cercanos (en alrededor de 800nm) a la reflexión en longitudes de onda rojas (alrededor de 650nm) . El VI es elevado para plantas verdes y bajo para suelos. Sin embargo el sistema aún tiene numerosos problemas que incluyen el enfoque de la luz desde sus fuentes de luz LED cuando el objeto objetivo varia en distancia de los LEDs y su capacidad para discriminar entre diferentes plantas verdes con alguna fiabilidad.
US 5673113 A1 (Fig. 1) revela un dispositivo de análisis para la clasificación automática de frutas o vegetales por calidad y coloración - con respecto a los detalles del procesamiento realizado por la unidad de procesamiento US 5673113 se refiere explicitamente a FR 2703932 A1. El dispositivo según US 5673113 (Fig. 1) comprende un primer conjunto con una fuente láser multilinea 4 cuyo haz es proporcionado por medio de un espejo de desviación 5 hacia un cubo polarizador 6 (para distinguir haces entrantes y salientes) y medios de recogida 7 descritos en FR2703932 que incluyen un detector. El dispositivo comprende además un segundo conjunto con una fuente láser 8 compuesta de un diodo láser colimado infrarrojo cuyo haz es transmitido por medio de un espejo de desviación 9 hacia el cubo polarizador 10 – también se proporciona el medio de recogida en 11 similar al medio de recogida 7. El dispositivo comprende además un tercer conjunto compuesto de un diodo láser colimado infrarrojo 12 cuyo haz es transmitido por medio de un espejo de desviación 13 hacia un cubo polarizador 14 – también se proporciona la cadena de recogida 15 que incluye un detector. El dispositivo también comprende láminas dicroicas 16-18 próximas respectivamente a cada una de las tres fuentes de luz 4, 8 y 12 para desviar respectivamente longitudes de onda de menos de 700 nanómetros, longitudes de onda de menos de 800 nanómetros y longitudes de onda de menos de 1 micra para generar un haz superpuesto que es transmitido hacia un polígono giratorio 19 y un conjunto de espejos 20-29 para el posterior barrido del haz compuesto sobre los vegetales o fruta de muestra que son transportados sobre dos líneas de transporte 2, 3.
La luz reflejada es detectada por los respectivos detectores en los medios de recogida 7, 11, 15 cuyas señales de salida son introducidas en una unidad de procesamiento detallada en FR2703932 que comprende medios de conversion analógica/numérica y medios de cálculo adecuados para calcular, en base a criterios programados predefinidos, artículos utilizables de información de clasificación por los que los datos colorimétricos generados son utilizados en la clasificación automática de las frutas o vegetales (además se realiza un preprocesamiento en el que la detección de una discontinuidad cóncava con forma cóncava en la luz reflejada en todas las longitudes de onda da lugar a que el análisis colorimétrico no se realiza para tales puntos) . El algoritmo de procesamiento colorimétrico consiste en almacenar, inicialmente, para cada longitud de onda, los valores de los níveles grises (0 a 255) de todos los puntos. Los pasos posteriores dependen de la fruta a clasificar y los colores predominantes en la última, y pueden ser adaptados para cada tipo de fruta por ejemplo, manzanas, el espectro colorimétrico entre verde y azul y entre rojo y verde son calculados para cada punto.
Breve Resumen de la Invención [0007] La presente invención comprende un sistema de detección como se define en la Reivindicación anexa 1.
La presente invención comprende un método de identificación de sustancia de plantas como se define en la Reivindicación anexa 10.
En esta especificación el término colimado es utilizado para significar un haz estrecho con mínima divergencia en la longitud útil del haz cuando se utiliza en aplicaciones adecuadas para la presente invención.
En esta especificación el término longitud de onda es utilizado para definir una característica de luz. Una persona con conocimiento en la materia será fácilmente capaz de convertir la longitud de onda a frecuencia de luz mediante el uso de la bien conocida formula c = AJf, donde c es la velocidad de la luz, A es la longitud de onda y f es la frecuencia.
Descripción de Diagramas [0011] Con el fin de proporcionar un mejor entendimiento de la presente invención, se describirán ahora realizaciones preferidas en mayor detalle, a modo de ejemplo únicamente, con referencia a los diagramas acompañantes, en los cuales:
La Figura 1 es un diagrama conceptual de un sistema de detección y pulverización según un ejemplo;
La Figura 2 es un gráfico que muestra un espectro reflectante típico (por longitud de onda) de una hoja verde;
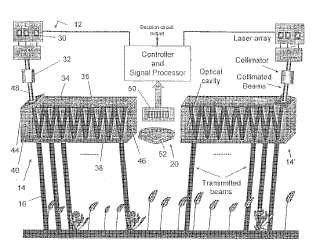
La Figura 3 es un diagrama esquemático de una realización de un sistema de detección utilizado para detección de malas hierbas;
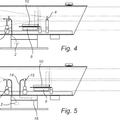
La Figura 4 es un diagrama esquemático de una fuente de luz colimada; y,
La Figura 5 es un diagrama esquemático de una fuente de luz.
Descripción Detallada de Realizaciones Preferidas [0012] La Figura 1 muestra un sistema de detección y pulverización 10 que comprende un componente de detección 12, un controlador 22 y una unidad controlable de pulverizador 24. El sistema 10 está normalmente unido a una pluma de una pieza de maquinaria agrícola (tal como un tractor) y se desplaza sobre un cultivo en un campo que está siendo cultivado. La dirección de desplazamiento sería de derecha a izquierda del diagrama. El campo tiene plantas 28 del cultivo que crecen del suelo 30 y plantas indeseadas, a partir de aquí referidas como malas hierbas 26. El sistema 10 necesita ser capaz de distinguir no solamente el suelo 30 del cultivo 28, sino en particular necesita distinguir las malas hierbas 26 del cultivo 28. Alternativamente el sistema puede ser diseñado para detectar otros organismos nocivos como insectos.
El sistema 10 funciona produciendo al menos un haz de luz 16 desde una fuente de luz 14 del componente de detección 12. El haz de luz 16 es dirigido a objetos dentro de un campo de visión a medida que se mueve por el campo. El haz transmitido 16 es reflejado por objetos, y en este caso una mala hierba 26, para producir un haz reflejado 18. Una unidad detectora 20 del componente de detección 12 detecta el haz reflejado 18. Datos de reflectancia medidos de la unidad detectora 20 son enviados al controlador 22, que procesa los datos para identificar al objeto siendo explorado por el haz 16. El controlador 22 se dispone además para controlar la unidad de pulverización 24 de tal modo que en el momento en que la unidad de pulverización pasa sobre la mala hierba 26, una válvula en la unidad de pulverización 24 puede ser operada de modo que rocíe la mala hierba 26, con un producto químico adecuado, utilizando por ello el producto químico unicamente como se requiera. El proceso de identificación realizado por el controlador 22 se describe más adelante.
En el estado de la técnica, el índice de vegetación se define como la proporción de reflexión en longitud de onda cercana al infrarrojo (alrededor de 800nm) a la reflexión a longitudes de onda del rojo (alrededor de 650nm) . Se ha descubierto por el... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de detección para discriminar plantas que comprende:
una fuente de luz que comprende tres o más láseres, cada láser estando dispuesto para producir un haz de láser pulsado de una longitud de onda diferente, un combinador colimador y multiplexor por división de tiempo WDM, para combinar los haces de luz pulsada láser de los tres o más láseres en un haz de luz combinado colimado y multiplexado por división de tiempo; un divisor para dividir el haz de luz combinado colimado y multiplexado por división de tiempo en una pluralidad de haces de luz teniendo cada uno de ellos las diferentes longitudes de onda de tal modo que los haces de luz son dirigidos a distintas áreas no superpuestas en un campo de visión;
un detector para medir claramente la reflectancia de cada una de las distintas áreas no superpuestas en cada una de las distintas longitudes de onda; y
un identificador para identificar al menos un tipo de planta en el campo de visión a partir de la reflectancia medida en cada una de las longitudes de onda en cada una de las distintas áreas no superpuestas..
2. El sistema de detección como se reivindica en la Reivindicación 1, en el que el identificador identifica el al menos un tipo de planta determinando una proporción entre las reflectancias de luz medidas en cada una de las longitudes de onda y comparando la proporción determinada con una base de datos de proporciones de referencia de plantas conocidas para identificar plantas observadas en cada una de las distintas áreas no superpuestas.
3. El sistema de detección como se reivindica en la Reivindicación 1, en el que el identificador identifica el al menos un tipo de planta determinando gradientes entre las reflectancias medidas en cada una de las longitudes de onda y comparando los gradientes determinados con una base de datos de gradientes de referencia de plantas conocidas para identificar plantas observadas en cada una de las distintas áreas no superpuestas.
4. El sistema de detección como se reivindica en cualquiera de las Reivindicaciones precedentes, en el que el divisor está configurado de modo que la intensidad de cada haz de luz láser pulsado disminuye progresivamente y el detector está colocado de tal modo que un haz de luz más intenso está más lejano del detector.
5. El sistema de detección como se reivindica en cualquiera de las Reivindicaciones precedentes, en el que el colimador comprende:
un primer reflector configurado para reflejar luz en una primera de las longitudes de onda y también configurado para pasar luz en una segunda de las longitudes de onda, en donde el primer reflector, un primero de los láseres y un segundo de los láseres están dispuestos de tal modo que un primer haz de láser del primer láser es reflejado por el primer reflector de modo para se combine y colime con un segundo haz de láser del segundo láser que pasa a través del primer reflector;
un segundo reflector configurado para reflejar haces de láser colimados en la primera y segunda longitud de onda y también configurado para pasar un haz de láser en una tercera de las longitudes de onda, en donde un tercero de los láseres, el primer reflector y segundo reflectos están dispuestos de tal modo que los haces de láser combinados del primer y segundo láseres son reflejados por el segundo reflectos de tal modo que se combinan y coliman con un tercer haz de láser del tercer láser que pasa a través del segundo reflector.
6. El sistema de detección como se reivindica en cualquiera de las Reivindicaciones precedentes, en el que el divisor comprende:
una cavidad óptica alargada que tiene un primer extremo y un segundo extremo, un primer lado longitudinal y un segundo lado longitudinal opuesto;
una capa de recubrimiento reflectante en el primer lado longitudinal que refleja luz dentro de la cavidad óptica;
una capa de recubrimiento parcialmente reflectante en el segundo lado longitudinal de tal modo que parte del haz de luz láser combinado en la cavidad óptica que alcanza la capa de recubrimiento parcialmente reflectante se reflejará y parte se transmitirá fuera de la cavidad óptica; y una entrada óptica a la cavidad en o adyacente al primer extremo de modo que el haz de luz láser combinado pueda entrar en la cavidad y reflejarse entre los lados longitudinales hacia el segundo extremo, con parte del haz láser combinado saliendo de la cavidad a través del segundo lado longitudinal de forma que el haz de luz láser combinado es transformado en una pluralidad de haces de luz láser separados emanando del segundo lado longitudinal de forma que iluminan la pluralidad de distintas áreas no superpuestas en el campo de visión.
7. El sistema de detección como se reivindica en la Reivindicación 2, en el que el identificador comprende:
un almacenamiento para una base de datos de características de referencia de plantas de, o derivadas de, la intensidad reflejada de luz que alcanza cada planta candidata en tres o más longitudes de onda; y
un procesador para determinar la proporción de la reflectancia medida en cada una de las áreas no superpuestas y comparar la proporción determinada con las características de referencia en la base de datos para identificar el tipo de planta.
8. El sistema de detección como se reivindica en la Reivindicación 3, en el que el identificador comprende:
un almacenamiento para una base de datos de características de referencia de plantas de, o derivadas de, la intensidad reflejada de luz que alcanza cada planta candidata en tres o más longitudes de onda diferentes especificadas; y
un procesador para determinar un gradiente de las reflectancias medidas en cada una de las distintas zonas no superpuestas y comparar el gradiente determinado con las características de referencia en la base de datos para identificar el tipo de planta.
9. El sistema de detección como se reivindica en cualquiera de las Reivindicaciones precedentes, en el que una orientación de cada uno de los láseres es tal que la polarización de los haces de luz láser combinados del combinador es alineada en las tres o más longitudes de onda.
10. Un método de identificación de plantas que comprende:
producir tres o más haces de luz pulsada láser cada uno con diferente longitud de onda;
combinar, colimar y multiplexar por división de tiempo WDM los tres o más haces de luz pulsada láser en un haz de luz combinado, colimado y multiplexado por división de tiempo;
dividir el haz de luz combinado colimado y multiplexado por división de tiempo en una pluralidad de haces espaciados unos de otros de modo que los haces de luz son dirigidos a distintas áreas no superpuestas en un campo de visión;
medir la reflectancia en cada una de las distintas longitudes de onda y de cada una de las distintas zonas no superpuestas; e
identificar al menos un tipo de planta en el campo de visión a partir de la reflectancia medida en cada una de las distintas áreas no superpuestas.
11. El método como se reivindica in Reivindicación 10, en el que la identificación de plantas comprende:
proporcionar una base de datos de características de referencia de plantas candidatas, cada característica de referencia comprendiendo proporciones de intensidades de reflectancia de luz que alcanza cada planta candidata en tres o más longitudes de onda diferentes especificadas;
determinar una proporción de intensidades de reflectancia de luz en tres o más longitudes de onda diferentes especificadas; y
comparar las proporciones determinadas con las características de referencia para identificas la planta.
12. El método como se reivindica en la Reivindicación 10 o Reivindicación 11, en el que la identificación de plantas comprende:
proporcionar una base de datos de características de referencia de plantas candidatas, cada característica de referencia comprendiendo gradientes entre diferentes intensidades de reflectancia de luz que alcanza cada planta candidata en tres o más longitudes de onda diferentes especificadas;
determinar gradientes entre diferentes intensidades de reflectancia en tres o más longitudes de onda diferentes especificadas; y
comparar los gradientes determinados con las características de referencia para identificar la planta.
Patentes similares o relacionadas:
DISPOSITIVO PORTABLE Y MÉTODO PARA LA ESTIMACIÓN NO INVASIVA DEL NIVEL DE GLUCOSA EN SANGRE, del 30 de Julio de 2020, de UNIVERSIDAD DE SEVILLA: El dispositivo comprende una unidad de medida con un módulo de medición del nivel de glucosa, un primer módulo de computación , para procesar datos de una primera […]
DISPOSITIVO PORTABLE Y MÉTODO PARA LA ESTIMACIÓN NO INVASIVA DEL NIVEL DE GLUCOSA EN SANGRE, del 23 de Julio de 2020, de UNIVERSIDAD DE SEVILLA: Dispositivo portable y método para la estimación no invasiva del nivel de glucosa en sangre. El dispositivo comprende una unidad de medida con un módulo […]
Análisis espectral del infrarrojo medio de un material heterogéneo fluente, del 27 de Noviembre de 2019, de FOSS ANALYTICAL A/S: Un procedimiento de determinación de componentes de una muestra de leche heterogénea fluente que comprende: obtener una muestra de leche heterogénea; […]
 Dispositivo para mediciones de absorción de radiación y método para calibración del mismo, del 25 de Septiembre de 2019, de OPSIS AB: Un dispositivo para mediciones de absorción de radiación, que comprende,
una fuente de radiación que emite radiación electromagnética que tiene una longitud […]
Dispositivo para mediciones de absorción de radiación y método para calibración del mismo, del 25 de Septiembre de 2019, de OPSIS AB: Un dispositivo para mediciones de absorción de radiación, que comprende,
una fuente de radiación que emite radiación electromagnética que tiene una longitud […]
Procedimiento para determinar el estado de espín de compuestos de transición de espín, uso del procedimiento para leer datos digitales y medio de memoria óptica o magnetoóptica, del 10 de Julio de 2019, de TECHNISCHE UNIVERSITAT WIEN: Procedimiento para determinar el estado de espín de un compuesto de transición de espín por medio de radiación con luz en un dominio de longitudes de onda definido para […]
TRATAMIENTO CON CALOR DE ROPA DE LAVADO, del 20 de Junio de 2019, de BSH ELECTRODOMESTICOS ESPAÑA S.A.: Tratamiento con calor de ropa de lavado. Un dispositivo para controlar un tratamiento con calor de ropa de lavado comprende una fuente de luz que está configurada […]
Método para medir una respuesta de muestra espectral, del 9 de Mayo de 2019, de MAX-PLANCK-GESELLSCHAFT ZUR FORDERUNG DER WISSENSCHAFTEN E.V.: Método de medición de una respuesta espectral de una muestra , que comprende las etapas siguientes: - generar una luz de sonda que presenta […]
Método para predecir la estabilidad de corrientes de proceso de hidrocarburos usando espectros de infrarrojo cercano, del 1 de Mayo de 2019, de NALCO COMPANY: Un método para predecir la estabilidad en una corriente de proceso de hidrocarburos usando un espectro de infrarrojo cercano combinado con un modelo […]