Filtrado MIMO adaptativo en áreas de transformación adaptados dinámicamente.
Procedimiento para el filtrado MIMO de forma adaptativa en zonas der transformación dinámicamente
adaptadas,
en el que un sistema que se puede describir por una matriz de coeficientes H tiene un número P decanales de entrada y un número Q de canales de salida, que comprende las etapas de:
a) transformación temporal y espacial de las señales de entrada,
b) transformación temporal y espacial de las señales de salida deseadas
c) formación de la matriz de coeficientes H de acuerdo con la siguiente ecuación
H ≥ Txx
-1(m)Txy(m) 1)
donde H es la matriz de coeficientes que tienen una dimensión PL x Q, donde L es una longitud del filtro FIR, Pes un número de canales de entrada y Q es un número de canales de salida, y en el que Txx(m) y Txy(m) sonlas matrices de correlación de todas las señales de entrada o bien de todos los señales de entrada y señalesde salida deseadas en zona transformada espacialmente,
d) describir las matrices de correlación utilizando matrices de transformación espaciales C1 y C2 de acuerdocon las siguientes ecuaciones:
Txx(m) ≥ C1
TSxx(m)C1, 2)
Txy(m) ≥ C1
TSxy(m)C2, 3)
donde Sxx(m) y Sxy(m) representan las matrices de correlación correspondientes a la estructura análoga debloque en la zona transformada temporalmente y
e) la optimización de las matrices de transformación espaciales C1 y C2 de tal manera que las matrices decorrelación Txx(m) y Txy(m) son, respectivamente, diagonales en bloques.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09173656.
Solicitante: DEUTSCHE TELEKOM AG.
Nacionalidad solicitante: Alemania.
Dirección: FRIEDRICH-EBERT-ALLEE 140 53113 BONN ALEMANIA.
Inventor/es: BUCHNER,HERBERT, SPORS,SASCHA, HELWANI,KARIM.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G10K11/00 FISICA. › G10 INSTRUMENTOS MUSICALES; ACUSTICA. › G10K DISPOSITIVOS GENERADORES DE SONIDOS (juguetes musicales o sonoros A63H 5/00 ); METODOS O DISPOSITIVOS PARA PROTEGER CONTRA, O PARA AMORTIGUAR, RUIDO U OTRAS ONDAS ACUSTICAS EN GENERAL; ACUSTICA NO PREVISTA EN OTRO LUGAR. › Métodos o dispositivos para transmitir, conducir o dirigir el sonido en general; Métodos o dispositivos de protección contra el ruido u otras ondas acústicas en general, o para amortiguarlas.
- H04B3/23 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04B TRANSMISION. › H04B 3/00 Sistemas de líneas de transmisión (combinados con sistemas de transmisión de campo cercano H04B 5/00). › utilizando una reproducción de la señal transmitida desplazada en el tiempo, p. ej. por dispositivo de anulación.
- H04M9/08 H04 […] › H04M COMUNICACIONES TELEFONICAS (circuitos para el control de otros aparatos vía cable telefónico y que no implican aparatos de conmutación telefónica G08). › H04M 9/00 Disposiciones de interconexión no comprendiendo conmutación centralizada. › Sistemas telefónicos con altavoz de doble dirección con medios para acondicionara la señal, p. ej. para suprimir ecos para uno u otra dirección de tráfico.
- H04S7/00 H04 […] › H04S SISTEMAS ESTEREOFONICOS. › Disposiciones para la indicación; Disposiciones para el control, p. ej. para el control de la compensación.
PDF original: ES-2427840_T3.pdf
Fragmento de la descripción:
Filtrado MIMO adaptativo en áreas de transformación adaptados dinámicamente La invención se refiere a un procedimiento y un dispositivo para un filtrado MIMO adaptativo en áreas de transformación adaptados dinámicamente.
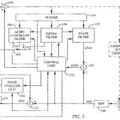
El documento DE 103 51 793 A1 [8] se refiere a un dispositivo de filtro adaptativo y procedimiento para procesar una señal de entrada acústica. Se hace referencia a esta publicación en su totalidad. Como se describe en particular en el mismo, filtros adaptativos discretos en tiempo representan una técnica ampliamente utilizada en el procesamiento de señales digitales. Tal filtro adaptativo es un filtro para el procesamiento de la señal digital, que tiene la propiedad de ser capaz de cambiar independiente su función de transferencia en el funcionamiento. La Figura 1 muestra un ejemplo filtrado adaptativo de un solo canal. Se compone de un filtro adaptativo 11 que tiene una entrada 13 y una salida 15. El filtro adaptativo 11 tiene coeficientes de filtro L que se combinan para formar un vector h = (h [0], ..., h [L-1]) . En la entrada 13 del filtro 11 se aplica una señal de entrada en forma de una secuencia x [n]. Esta secuencia entrante pasa a través del filtro adaptativo y está aplicada en la salida 15 como secuencia de salida y '[n]. La salida 15 está acoplada a un sumador 17, que tiene una señal deseada y [n] en una entrada adicional 19. El sumador forma la diferencia y la emite como una señal de error e[n]. El dispositivo comprende además un bloque 23 que realiza un algoritmo de adaptación. Este bloque por una parte contiene una señal de entrada x[n] y por otro lado, la señal de error e[n]. El bloque 23 tiene una salida 25 que está acoplada con el filtro 11. A través de la salida 25 se suministran al filtro 11los coeficientes de filtro determinados por el algoritmo de adaptación en el bloque 23.
Este filtro adaptativo opera según el principio conocido que consiste en determinar coeficientes de filtro (agrupados en un vector h) con el fin de aproximar la señal de salida y'[n] del sistema (o un canal de salida en un sistema multicanal) con una señal de entrada x [n] conocida (o una pluralidad de señales de entradas conocidas) a una señal deseada y[n] (o una pluralidad de señales deseadas en un sistema multi-canal) . Esto se consigue aquí por medio de una reducción por bloques de la señal de error e[n] = y[n] - y'[n] (o una pluralidad de señales de error en un sistema multi-canal) de acuerdo con un cierto criterio (por lo general por el error cuadrático medio) . La longitud del bloque puede ser mayor que o igual a un valor de muestra. La optimización de los coeficientes de filtro puede ser realizada de forma recursiva o no recursiva. La Figura 2 muestra la versión correspondiente de múltiples canales, en la que las rutas de señal de múltiples canales se muestran en negrita, y la pluralidad de señales se describen por los vectores en cada caso. En caso de una pluralidad de canales de entrada y una pluralidad de canales de salida, el sistema adaptativo H en general representa un sistema MIMO totalmente cargado (Multiple-Input and Multiple-Output) que puede ser descrito por una matriz. Por lo general, en caso de sistemas adaptivos de este tipo se asume una respuesta de impulsos finitos de extensión temporal (FIR, inglés. Finite Impulse Response) , ya que éste garantizada estabilidad durante la adaptación.
Un ejemplo bien conocido de la aplicación de filtrado adaptativo multi-canal es la llamada cancelación de eco acústica, que se requiere para la comunicación dúplex completa de manos libres, tales como sistemas de teleconferencia. Dicha construcción de este tipo se muestra en la Figura 3. Desde una sala de emisión distante 31 se transmite hacia una sala de conferencia local 33 (“sala próxima") una señal de audio multicanal a través de las líneas 35 a través de P canales de altavoces (señales x1, ..., XP) y de un número P de altavoces 37 en la sala de conferencia local 33. Al mismo tiempo, en la sala próxima 33 se graban señales de micrófono y1, …, yQ de los oradores locales por un número Q de micrófonos 39. Con el fin de evitar en la comunicación full-dúplex, la retroalimentación de señales del altavoz procedentes de la sala distante a través de los micrófonos de nuevo a la sala de emisión distante 31 o, por ejemplo, hacia un sistema automático de reconocimiento de voz, etc. mediante un compensador de eco acústico, las P x Q vías de señales acústicas de la sala próxima 33 se simulan por medio de un filtro MIMO adaptativo 40, y los ecos simulados entonces se restan de las señales de micrófono grabadas y1, ..., yQ.
En un filtrado adaptivo multi-canal de tal manera hay dos principales problemas conocidos: por un lado, la relativamente alta complejidad computacional debido a la estructura del sistema (que debe simular P x Q vías de señales de forma adaptativa mediante en cada caso varios miles de coeficientes de filtro) , por otro lado, la adaptación en caso de señales de entrada correlacionadas entre sí del filtro adaptativo es problemático en muchas aplicaciones para motivos numéricos. En la compensación de eco acústica, por ejemplo, las señales de entrada correlacionadas resultan porque la mayoría de las señales proceden de pocas fuentes comunes de una sala distante. En una optimización de coeficientes mediante la reducción al mínimo del rendimiento de error cuadrática (llamado problema de mínimos cuadrados) , por lo tanto, las denominada ecuación normal resultante presenta una matriz de correlación poco acondicionada, de modo que para su solución iterativa por lo general se requieren algoritmos muy computacionalmente intensivos, tales como el algoritmo [1] de mínimos cuadrados recursivo (RLS) .
Con el fin de evitar parcialmente a estos problemas, se ha propuesto el uso de filtrado adaptativo en los áreas apropiados de transformación de señal, tal como se muestra en la Figura 4. En este caso, los bloques 27, 28, 29 con matrices T1, T2, T3 constituyen primeras transformaciones genéricas, tales como transformaciones lineales de secuencias temporales de canales múltiples. El bloque 27 con la matriz T1 transforma la señal x[n] en una señal x[m]. El bloque 28 con la matriz T2 transforma la señal y[n] en una señal y[m]. El bloque 29 transforma una señal e[m] en una señal e[n]. Con respecto a los demás elementos se hará referencia a la descripción de la Figura 3. Anteriores enfoques adaptivos descritos hasta ahora en la literatura en los áreas de transformación se basan por lo general en las transformaciones temporales en los canales de señal individuales, como el "filtrado adaptable del dominio de la frecuencia" (FDAF) , que se describe resumiendo en [2] para el caso de múltiples canales. En este caso se utiliza esencialmente la estructura FIR de los sistemas parciales individuales (de un solo canal) , de manera que se puede trabajar con transformaciones conocidas invariantes en el tiempo, en particular la transformación discreta de Fourier (DFT) . Esto causa tanto una ganancia en la complejidad de las operaciones de filtrado de los subsistemas de un solo canal, así como para mejorar las propiedades numéricas de la adaptación.
Mediante la ampliación de esta idea especialmente conocida por el FDAF recientemente se han propuestos varios procedimientos de adaptación con transformaciones temporales y espaciales, por ejemplo, [3], [4], [5], [6], [7], [8]. El objetivo de transformación espacial, especialmente en sistemas de múltiples canales en el contexto de matrices de sensor y actuador, por ejemplo, en la reproducción de audio utilizando matrices de altavoces en caso de los denominados síntesis de campo de onda, véase, por ejemplo, [7], posibilitar el uso de las aplicaciones de filtrado adaptativo, tales como compensación de eco acústico. En este caso se pretende, además de las ventajas antes mencionadas de FDAF conseguir también una digitalización aproximada, es decir, un desacoplamiento del sistema MIMO adaptativo originalmente completamente ocupado en el área de la transformada [3].
Una diferencia muy significativa a la transformación puramente temporal es que para la elección de las transformaciones espaciales apropiadas está disponible mucho menos conocimiento previo de manera que en la práctica hasta ahora sólo se han alcanzado aproximaciones relativamente crudas del objetivo anterior del desacoplamiento del sistema MIMO.
Un primer enfoque de aproximación es el llamado filtrado adaptable del dominio de onda ("Wave-Dominio Filtro Adaptable") (WDAF) , por ejemplo, [6]. Esto se basa en la descripción física de la propagación de ondas a través de la ecuación de onda como conocimiento previo. Mediante algunos supuestos acerca de la configuración de geometría matriz y el supuesto de condiciones... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para el filtrado MIMO de forma adaptativa en zonas der transformación dinámicamente adaptadas, en el que un sistema que se puede describir por una matriz de coeficientes H tiene un número P de canales de entrada y un número Q de canales de salida, que comprende las etapas de:
a) transformación temporal y espacial de las señales de entrada,
b) transformación temporal y espacial de las señales de salida deseadas c) formación de la matriz de coeficientes H de acuerdo con la siguiente ecuación H = Txx-1 (m) Txy (m) 1)
donde H es la matriz de coeficientes que tienen una dimensión PL x Q, donde L es una longitud del filtro FIR, P es un número de canales de entrada y Q es un número de canales de salida, y en el que Txx (m) y Txy (m) son las matrices de correlación de todas las señales de entrada o bien de todos los señales de entrada y señales de salida deseadas en zona transformada espacialmente,
d) describir las matrices de correlación utilizando matrices de transformación espaciales C1 y C2 de acuerdo con las siguientes ecuaciones:
Txx (m) = C1TSxx (m) C1, 2)
Txy (m) = C1TSxy (m) C2, 3)
donde Sxx (m) y Sxy (m) representan las matrices de correlación correspondientes a la estructura análoga de bloque en la zona transformada temporalmente y
e) la optimización de las matrices de transformación espaciales C1 y C2 de tal manera que las matrices de correlación Txx (m) y Txy (m) son, respectivamente, diagonales en bloques.
2. Procedimiento de acuerdo con la reivindicación 1, en el que para la diagonalización de bloque de las matrices de correlación Txx (m) y Txy (m) la matriz de transformación espacial C1 basando en los datos de entrada de acuerdo con la ecuación 2) se mejora iterativamente, en donde preferiblemente para la matriz de transformación espacial C1 se utilizan valores iniciales, que se determinan de antemano por la determinación de las propiedades del sistema,
cálculo de una de matriz de transformación espacial C2 mejorada, basado en la ecuación 3) usando la matriz de transformación espacial C1 calculada previamente y la señales de entrada y las señales de salida deseadas, y repetición de los pasos anteriores para la mejora iterativa de las matrices de transformación espaciales C1 y C2.
3. Procedimiento de acuerdo con la reivindicación 1, en el que para la diagonalización de bloque de las matrices de correlación Txx (m) y Txy (m) se mejora de forma iterativa de la matriz de transformación C1 y la matriz de transformación espacial C2 basado en los datos de entrada de acuerdo con la ecuación 3) , en donde preferiblemente para las matrices de transformación espaciales C1 y C2 se utilizan valores iniciales, los cuales son determinados previamente por la determinación de las características del sistema, utilizando las señales de entrada y las señales de salida deseadas y
repitiendo el paso anteriormente descrito para la mejora iterativa de las matrices de transformación espaciales C1 y C2.
4. Procedimiento de acuerdo con las reivindicaciones 2 ó 3, en el que la repetición de la mejora iterativa de las matrices de transformación espaciales C1 y C2 se realiza con una determinada velocidad de actualización, y en el que se puede ajustar la velocidad de actualización, preferiblemente sobre la base de la potencia de procesamiento disponible del sistema y/o de acuerdo con un cierto progreso determinado actualmente de la digitalización de bloque de las matrices de correlación Txx (m) y Txy (m) .
5. Procedimiento de acuerdo con la reivindicación 4, en el que el progreso de la diagonalización de bloque de las matrices de correlación Txx (m) y Txy (m) se determina mediante una estimación usando una medida de compactación que reproduce el dominio actualmente alcanzable de la diagonal principal frente de las diagonales secundarias de las matrices de correlación Txx (m) y Txy (m) .
6. Procedimiento de acuerdo con la reivindicación 5, en el que las medidas de compactación para las dos matrices de transformación C1 y C2 preferiblemente son idénticos.
7. Procedimiento de acuerdo con una cualquiera de las reivindicaciones 1 a 6, que comprende además la etapa de:
adaptación de coeficientes de filtro, en el que, preferiblemente, la matriz de correlación de entrada estimada se utiliza para el algoritmo de filtro adaptativo.
8. Procedimiento de acuerdo con la reivindicación 7, en el que las señales de error residuales del algoritmo de adaptación se transforman de nuevo hacia atrás en la zona de espacio-tiempo.
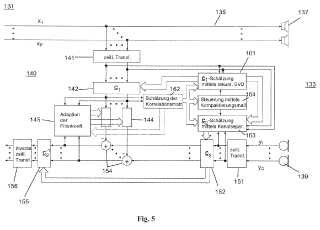
9. Dispositivo para filtrado adaptativo MIMO en zonas de transformación adaptadas dinámicamente, en donde un sistema adaptivo que se puede describir por una matriz de coeficientes H presenta un número P de canales de entrada y un número Q de canales de salida, con:
a) un primer bloque (141) de la transformación temporal de las señales de entrada,
b) un segundo bloque (142) a la transformación espacial de las señales emitidas por el primer bloque (141) ,
c) un tercer bloque (151) para la transformación temporal de señales de salida deseadas,
d) un cuarto bloque (152) para la transformación espacial de las señales emitidas por el tercer bloque,
e) medios para la optimización de una matriz de transformación espacial C1 del segundo bloque (142) y para la optimización de una matriz de transformación espacial C2 del cuarto bloque (152) de acuerdo con un procedimiento de acuerdo con una cualquiera de las reivindicaciones 1 a 8.
10. Dispositivo de acuerdo con la reivindicación 9, en el que el medio para la optimización de la matriz de transformación espacial C1 presenta un primer bloque de estimación (161) que recibe como señales de entrada las señales de salida del primer bloque (141) y que realiza una estimación de C1 y emite valores de la matriz de transformación C1 para el segundo bloque (142) .
11. Dispositivo de acuerdo con la reivindicación 9 ó 10, en el que el medio para la optimización de la matriz de transformación espacial C2 tiene un segundo bloque de estimación (163) que recibe como señales de entrada las señales de salida del primer bloque (141) y las señales de salida del tercer bloque (151) y realiza una estimación C2 y emite los valores de la matriz de transformación C2 para el cuarto bloque (152) .
12. Dispositivo de acuerdo con la reivindicación 10 u 11, que comprende unos medios de control (164) para controlar una velocidad de actualización de las matrices de transformación C1, C2 por medio de una medida de compactación, en donde dicho medio de control (164) está conectado con el primer bloque de estimación (161) y/o con el segundo bloque de estimación (162) .
13. Dispositivo de acuerdo con una de las reivindicaciones 9 a 12, que comprende un tercer bloque de estimación
(162) que recibe como las señales de entrada las señales de salida del segundo bloque (142) , y emite los valores de una matriz de correlación Txx (m) .
Patentes similares o relacionadas:
 Circuito de retardo para el desplazamiento en tiempo de una señal de radiofrecuencia y dispositivo de reducción de interfaces utilizando dicho circuito, del 29 de Julio de 2020, de Airbus DS SLC: Circuito de retardo para el desplazamiento en tiempo de una señal de radiofrecuencia de entrada (Vin), comprendiendo el citado circuito de retardo un filtro de […]
Circuito de retardo para el desplazamiento en tiempo de una señal de radiofrecuencia y dispositivo de reducción de interfaces utilizando dicho circuito, del 29 de Julio de 2020, de Airbus DS SLC: Circuito de retardo para el desplazamiento en tiempo de una señal de radiofrecuencia de entrada (Vin), comprendiendo el citado circuito de retardo un filtro de […]
Procesamiento de la señal de audio en un sistema de comunicación, del 14 de Marzo de 2018, de KONINKLIJKE PHILIPS N.V: Equipo de comunicaciones para uso por un centro de llamadas para permitir las comunicaciones entre el centro de llamadas y uno o más dispositivos […]
Aparato y método para calcular coeficientes de filtro para supresión de eco, del 1 de Junio de 2016, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Un aparato para el calculo de coeficientes de filtro para un filtro adaptativo para filtrar una senal de microfono con el fin de suprimir un eco debido […]
Un método y aparato para cancelar la señal transmitida en un transceptor doble homodino, del 19 de Noviembre de 2014, de 3M INNOVATIVE PROPERTIES COMPANY: Un aparato que comprende: un primer acoplador configurado para recibir una primera parte de una señal del transmisor, estando asociada […]
 Un método y una disposición para cancelación de eco de señales de voz, del 20 de Marzo de 2013, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un método para cancelar ecos en un terminal de comunicaciones durante una llamada de voz con unaparte interesada opuesta, comprendiendo el terminal […]
Un método y una disposición para cancelación de eco de señales de voz, del 20 de Marzo de 2013, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un método para cancelar ecos en un terminal de comunicaciones durante una llamada de voz con unaparte interesada opuesta, comprendiendo el terminal […]
 Compensador de eco de la red, del 13 de Marzo de 2013, de QUALCOMM INCORPORATED: Un procedimiento para realizar compensación de eco en un compensador de eco, teniendo dichocompensador de eco una pluralidad de estados […]
Compensador de eco de la red, del 13 de Marzo de 2013, de QUALCOMM INCORPORATED: Un procedimiento para realizar compensación de eco en un compensador de eco, teniendo dichocompensador de eco una pluralidad de estados […]
Cancelación de eco multicanal con regularización por permutación circular, del 27 de Junio de 2012, de MICROSOFT CORPORATION: Un procedimiento para conmutar automáticamente entre dos tipos distintos de procedimientos de cancelación deeco al procesar una o más señales de reproducción y una […]
 PROCEDIMIENTO Y SISTEMA PARA CANCELAR ECO DE BAJO RETARDO, del 24 de Septiembre de 2010, de TANDBERG TELECOM AS: Un cancelador de eco de audio ajustado para proporcionar una señal de salida con eco atenuado a partir de una señal de micrófono con eco añadido […]
PROCEDIMIENTO Y SISTEMA PARA CANCELAR ECO DE BAJO RETARDO, del 24 de Septiembre de 2010, de TANDBERG TELECOM AS: Un cancelador de eco de audio ajustado para proporcionar una señal de salida con eco atenuado a partir de una señal de micrófono con eco añadido […]