ESTACIÓN AUTOMÁTICA DE CLASIFICACIÓN DE MATERIALES.
Estación automática de clasificación de materiales.
Estación que comprende una cinta transportadora principal de materiales,
piezas u objetos a clasificar suministrados por una corriente de materiales de los que se separan aquellos clasificados como de interés, mediante unos robots y unas zonas de recogida de materiales clasificados, dispuestos en una posición adyacente a dicha cinta transportadora principal, estando los robots asociados con una unidad de sensores en un punto anterior de la circulación de los materiales a los robots, para la detección y extracción de los materiales detectados según indicaciones de la unidad de sensores a dichos robots. Estos robotes permiten liberar al personal de la labor de clasificación en situaciones de riesgo para su salud, y reducen los costes de funcionamiento, al posibilitar un trabajo continuo sin interrupciones ni descansos en la extracción de múltiples materiales distintos en un mismo paso.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201130874.
Solicitante: VAN LOOY, Eric.
Nacionalidad solicitante: Alemania.
Dirección: GROSSE JOHANNISTRASSE, 141 28199 BREMEN ALEMANIA.
Inventor/es: VAN LOOY,ERIC.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B07C5/344 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B07 SEPARACION DE SOLIDOS; CLASIFICACION. › B07C CLASIFICACION POSTAL; CLASIFICACION DE OBJETOS INDIVIDUALES O DE UN MATERIAL A GRANEL MANIPULABLE PIEZA POR PIEZA COMO OBJETOS INDIVIDUALES (especialmente adaptada a un fin determinado previsto en otra clase, ver la clase apropiada, p. ej. A43D 33/06, B23Q 7/12). › B07C 5/00 Clasificación según una característica o una particularidad de los objetos o del material a clasificar, p. ej. clasificación controlada por un dispositivo que detecta o mide esta característica o particularidad; Clasificación con ayuda de dispositivos manuales, p. ej. sistemas de agujas (clasificación exclusivamente manual B07C 7/00; separación de diferentes sólidos unos de otros por cribado, tamizado o utilización de corrientes de gas, u otra separación por vía seca para materiales a granel B07B; selección de monedas G07D). › según las propiedades eléctricas o magnéticas.
- B25J13/08 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 13/00 Controles para manipuladores (controles por programa B25J 9/16). › por medio de dispositivos sensores, p. ej. a la visión o al tacto.
- B65G15/14 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 15/00 Transportadores que tienen superficies portantes de cargas sin fin, es decir, cintas rodantes u otros sistemas equivalentes, a los que se transmite el esfuerzo de tracción por medios diferentes de los elementos de accionamiento sin fin de igual configuración (que tienen superficies que transportan la carga formadas por eslabones longitudinales interconectados B65G 17/06). › siendo la carga transportada entre las correas.
- B65G47/91 B65G […] › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › que tienen pinzas neumáticas, p. ej. aspirantes.
Fragmento de la descripción:
Estación automática de clasificación de materiales.
Objeto de la invención La presente invención se refiere A una estación automática de clasificación de materiales, destinada a separar materiales de distinta naturaleza provenientes de una corriente de materiales a granel, para su manipulación y aprovechamiento posterior.
Campo de aplicación de la invención.
Esta estación es aplicable en el sector de la manipulación y clasificación de materiales diversos, utilizable en las industrias del reciclaje de materiales, selección de alimentos, manipulación de minerales y otras.
Antecedentes de la invención.
En la actualidad son conocidas instalaciones de clasificación de materiales diversos, donde se pueden extraer materiales con valor o aprovechables de grandes cantidades de materiales mezclados a granel, tal como plásticos, metales y materiales de residuos urbanos, industriales, del reciclaje de automóviles o de construcción. También se realizan procesos de clasificación de rocas y minerales procedentes de la minería antes de su procesado por separado para aumentar el rendimiento del refinado y reducir la escoria.
Son conocidas instalaciones basadas en la circulación de los objetos o materiales por una cinta transportadora principal, y que a ambos lados presenta una serie de puestos de trabajo donde operarios seleccionan de entre dichos objetos que circulan aquellos que les son de su interés por su valor o aprovechamiento, tal como se ha citado. Un ejemplo de de estas instalaciones de clasificación son las líneas de selección y manipulación de alimentos, de tabaco o de materiales de reciclaje, por ejemplo. En estas instalaciones de clasificación el factor humano es muy importante, ya que la pericia y condiciones personales de cada operario influye en la clasificación y recolección de los materiales y objetos que le han indicado, haciendo variar la calidad de la separación de dichos materiales.
El trabajo resulta muy monótono, y si el operario cae enfermo o se distrae no se efectúa correctamente la clasificación. En ciertos casos, los materiales a clasificar son peligrosos o insalubres para el ser humano, por lo que su clasificación manual por operarios se hace complicada y requiere un equipamiento de protección adicional.
En algunos casos sobre la cinta transportadora se pueden colocar elementos que permiten extraer o desviar ciertos objetos y materiales de la circulación por ciertas características físicas. Por ejemplo, en una clasificación de materiales provenientes de la trituración de automóviles, los materiales férricos pueden ser extraídos bajo el efecto de un electroimán o los materiales de aluminio se pueden hacer saltar de la cinta transportadora por corrientes de remolino. Sin embargo, muchos materiales no están dotados de estas características para su extracción por separado y además deben ser manipulados con cierta delicadeza, como por ejemplo los alimentos.
El solicitante de la presente invención desconoce la existencia de antecedentes que resuelvan de forma satisfactoria la problemática expuesta.
Descripción de la invención La estación automática de clasificación de materiales, objeto de esta invención presenta unas particularidades técnicas destinadas a proporcionar unos medios sencillos y económicos de realizar dichos procesos de clasificación de materiales, con una calidad constante garantizada de la clasificación y protección de los operarios al relevarlos de dicho proceso manual de clasificación.
Esta estación es del tipo de las que comprenden una cinta transportadora principal de materiales, piezas u objetos a clasificar suministrados por una corriente de materiales de los que se separan aquellos clasificados como de interés.
De acuerdo con la invención, la estación comprende unos robots y unas zonas de recogida de materiales clasificados, dispuestos en una posición adyacente a dicha cinta transportadora principal, estando los robots asociados con una unidad de sensores en un punto anterior de la circulación de los materiales a los robots, para la detección y extracción de los materiales detectados de la cinta transportadora principal según indicaciones de la unidad de sensores a dichos robots.
Esta estación presenta numerosas ventajas, ya que los robots pueden trabajar de forma continua y con el mismo rendimiento. Además, los robots pueden manipular materiales que resultan peligrosos o nocivos para la salud, con lo que los trabajadores que se relevan de la instalación de clasificación en la que se instalan una o más estaciones de este tipo se pueden emplear en tareas más saludables, descansadas y con mejor aprovechamiento del potencial humano.
Los robots son seleccionados de acuerdo con los materiales y las condiciones de separación, adaptándose a dichos criterios el tipo y el tamaño del robot, el tipo de herramienta o medios de extracción de los materiales con los que se dota al robot y otros parámetros.
La detección de los materiales por los sensores se puede realizar por su color, tamaño, peso, brillo, contenidos, composición de su superficie, características moleculares, o combinación de cada una de dichos criterios.
Para ello, la unidad de sensores comprende un ordenador interior que conectado directamente con los distintos sensores procesa la información recibida de estos sensores para determinar la naturaleza de los materiales e indicar a los robots los que deben separar y coger cuando estén a su alcance.
En una realización, la unidad de sensores comprende varios sensores distintos para la detección de más de un material a clasificar. De esta forma es posible que en una estación se puedan extraer más de una fracción de materiales distintos en un mismo paso, reduciéndose así el número de pasos necesarios en la clasificación y optimizando los recursos.
Así, en una realización, un robot comprende dos o más zonas de recogida para la clasificación por el mismo robot de dos o más materiales distintos por separado.
En otra realización la estación comprende varios robots y varias zonas de recogida distintas a lo largo de la cinta transportadora principal, para realizar una clasificación de múltiples materiales que se extraen de la misma corriente de materiales transportados por dicha cinta transportadora principal.
Por ejemplo, en una realización las zonas de recogida de los materiales clasificados comprende una cinta de depositado de dichos materiales para cada robot y una cinta transportadora de recolección dispuesta a la salida de estas cintas de depositado para la extracción de los materiales clasificados de la estación.
Esta configuración de las zonas permite el encaminado completamente automatizado de los materiales clasificados hacia procesos posteriores fuera de la estación. Además, las cintas de depositado están dispuestas en un emplazamiento idóneo para que los brazos o herramientas que utilizan los robots para recoger los materiales clasificados se puedan depositar fuera de la cinta transportadora principal rápidamente.
En una realización preferente, la unidad de sensores está dispuesta sobre una cinta transportadora de alimentación de materiales en la entrada de la cinta transportadora principal. De esta manera los materiales a clasificar son desplazados a la cinta transportadora principal de forma dosificada por la diferencia de velocidad entre ambas. Esto posibilita que los materiales a clasificar estén más separados entre sí, y el robot pueda escoger el material buscado con mayor selectividad y evitando errores.
Esta estación utiliza medios sencillos que incrementan la seguridad en el trabajo y reduce los costos del proceso. Además se aumenta la calidad y el rendimiento del proceso de clasificación. La estación reduce el número de tareas peligrosas que deben realizar los operarios de la planta de clasificación, mejorando su salud y condiciones de trabajo, pudiéndose dedicar dichos operarios a otras tareas de mayor aprovechamiento o valor añadido.
Así, esta estación posibilita la reutilización de materiales reciclables que antes, cuya separación antes no era rentable o muy difícil de realizar, evitando su incineración o almacenamiento en vertederos. Además, la estación ayuda a reducir la emisión de dióxido de carbono a la atmósfera.
Descripción de las figuras.
Para complementar la descripción que se está realizando y con objeto de facilitar la comprensión de las características de la invención, se acompaña a la presente memoria descriptiva un juego de dibujos en los que, con carácter ilustrativo y no limitativo, se ha representado lo siguiente:
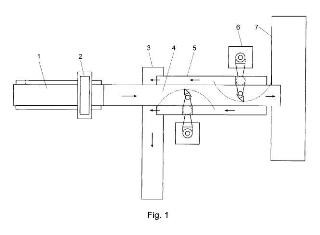
-La figura 1 muestra una vista esquematizada en planta de una...
Reivindicaciones:
1. Estación automática de clasificación de materiales, del tipo de las que comprenden una cinta transportadora principal de materiales, piezas u objetos a clasificar suministrados por una corriente de materiales de los que se separan aquellos clasificados como de interés, caracterizada porque comprende unos robots y unas zonas de recogida de materiales clasificados, dispuestos en una posición adyacente a dicha cinta transportadora principal,
estando los robots asociados con una unidad de sensores en un punto anterior de la circulación de los materiales a los robots, para la detección y extracción de los materiales detectados de la cinta transportadora principal según indicaciones de la unidad de sensores a dichos robots.
2. Estación, según la reivindicación 1, caracterizada porque la unidad de sensores comprende varios sensores distintos para la detección de más de un material a clasificar.
3. Estación, según cualquiera de las reivindicaciones anteriores, caracterizada porque un robot comprende dos o más zonas de recogida para la clasificación por el mismo robot de dos o más materiales distintos por separado.
4. Estación, según cualquiera de las reivindicaciones anteriores, caracterizada porque comprende varios robots y varias zonas de recogida distintas a lo largo de la cinta transportadora principal, para realizar una clasificación de múltiples materiales que se extraen de la misma corriente de materiales transportados por dicha cinta transportadora principal.
5. Estación, según cualquiera de las reivindicaciones anteriores, caracterizada porque las zonas de recogida de los materiales clasificados comprende una cinta de depositado de dichos materiales para cada robot y una cinta transportadora de recolección dispuesta a la salida de estas cintas de depositado para la extracción de los materiales clasificados de la estación.
6. Estación, según cualquiera de las reivindicaciones anteriores, caracterizada porque la unidad de sensores está dispuesta sobre una cinta transportadora de alimentación de materiales en la entrada de la cinta transportadora principal.
Patentes similares o relacionadas:
Dispositivo y procedimiento para desembalar y alimentar envueltas de envase plegadas de manera plana y verticales, del 10 de Junio de 2020, de SIG TECHNOLOGY AG: Dispositivo para transferir envolturas de envase plegadas de manera plana y verticales a una unidad de procesamiento subsiguiente, en particular una máquina llenadora para […]
Ventosa de aspiración y procedimiento para asir rodajas elásticas, del 27 de Mayo de 2020, de DEUTSCHES INSTITUT FUR LEBENSMITTELTECHNIK E.V.: Ventosa de aspiración para el uso como dispositivo de separación de rodajas elásticas de una pila de rodajas, con una campana de aspiración […]
Estación automática para recoger artículos y procedimientos relacionados para usar, del 26 de Febrero de 2020, de CT PACK S.R.L.: Una estación automática para recoger artículos (A) que comprende: - un sistema de movimiento que comprende un transportador que define una superficie […]
Dispositivo para recoger artículos, del 15 de Enero de 2020, de CT PACK S.R.L.: Un dispositivo para recoger artículos , que comprende una unidad de soporte y una pluralidad de cabezales de agarre portados mediante la unidad de soporte , […]
Silenciador para pinza de succión, del 25 de Diciembre de 2019, de DEUTSCHES INSTITUT FUR LEBENSMITTELTECHNIK E.V.: Silenciador con una carcasa dotada de una entrada que puede unirse con el conducto de gas de escape de una pinza de succión y con […]
Ventosa con faldón separable, del 4 de Diciembre de 2019, de VTEC Co. Ltd: Ventosa con faldón separable que comprende: un cuerpo hueco (11, 31, 41 o 51) que tiene un conducto formado verticalmente a través de él, una protuberancia anular […]
Dispositivo de ventosas y transportador por aspiración con un dispositivo de ventosas de este tipo, del 9 de Octubre de 2019, de Putz, Stefan: Dispositivo de ventosas para un transportador por aspiración que comprende una ventosa para recoger un producto, en donde la ventosa define una cámara de aspiración […]
Dispositivo de transporte de piezas y método para transportar piezas, del 17 de Abril de 2019, de FAGOR ARRASATE, S. COOP: Dispositivo de transporte de piezas, en particular de piezas en forma de placa, que comprende un medio transportador para transportar […]