Dispositivo de control para sistema de transferencia de fluido en el mar.
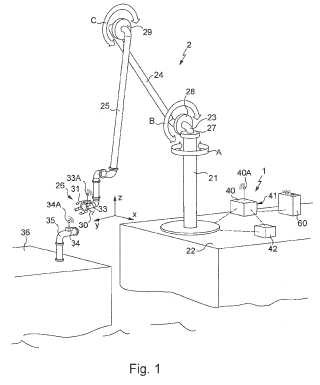
Dispositivo de control (1) para el movimiento y posicionamiento de un acoplamiento (26) para un sistema (2) decarga marino,
comprendiendo dicho sistema de carga marino al menos una línea de transferencia de fluido quepresenta un extremo de línea fijado a una base (21), y un extremo de línea móvil provisto de un acoplamiento (26)para la conexión a un conducto objetivo (35), presentando el acoplamiento al menos tres grados de libertad (A, B, C)con respecto a la base, estando el dispositivo caracterizado porque comprende al menos tres actuadores (27, 28,29), estando cada uno de ellos destinado a controlar el movimiento del sistema en un grado de libertad, y porque eldispositivo de control comprende al menos unos medios (33, 34) para proporcionar información sobre elposicionamiento del acoplamiento adaptados para su posicionamiento en al menos un elemento del grupoacoplamiento/conducto objetivo o un elemento en la inmediata proximidad de al menos uno de entre los elementosdel grupo acoplamiento/conducto objetivo y porque el dispositivo comprende además unos medios de cálculo (41)adaptados para:
calcular el posicionamiento relativo del acoplamiento directamente con respecto al conducto objetivo según lainformación proporcionada por los medios de información de posicionamiento del acoplamiento,calcular las instrucciones de control que se van a dar a cada uno de los actuadores, de manera que susmovimientos combinados den como resultado un movimiento del acoplamiento destinado a aproximar elacoplamiento al conducto objetivo,
aplicar dichas instrucciones de control para aproximar el acoplamiento al conducto objetivo,reiterar las tres etapas anteriores hasta que el acoplamiento esté presente delante del conducto objetivo en unaposición para la conexión, y
al menos uno de los elementos del grupo acoplamiento/conducto objetivo o un elemento fijado con respecto a almenos uno de los elementos del grupo acoplamiento/conducto objetivo comprende al menos unos medios (34)para proporcionar información sobre el posicionamiento del conducto objetivo y porque los medios de cálculoestán adaptados para deducir, basándose en la información sobre el posicionamiento del conducto y en lainformación sobre el posicionamiento del acoplamiento proporcionada por dichos al menos dos medios paraproporcionar información de posicionamiento (33, 34), el posicionamiento relativo del acoplamiento (26) conrespecto al conducto objetivo (35) y,
los medios (34) para proporcionar información sobre el posicionamiento del conducto objetivo incluyen undispositivo de un sistema para posicionamiento global, en particular de tipo GPS, que posibilita proporcionar unaposición absoluta del conducto objetivo, estando los medios de cálculo adaptados para calcular, basándose en lainformación sobre el posicionamiento absoluto del conducto objetivo, el posicionamiento relativo delacoplamiento con respecto al conducto objetivo.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2008/002685.
Solicitante: FMC TECHNOLOGIES S.A..
Nacionalidad solicitante: Francia.
Dirección: ROUTE DES CLERIMOIS 89100 SENS FRANCIA.
Inventor/es: LE DEVEHAT, RENAUD, SYLARD,NICOLAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63B27/24 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › B63B 27/00 Disposición de equipos a bordo para el embarque o el desembarque de carga o de pasajeros (gabarras o barcazas de descarga automática B63B 35/30; grúas flotantes B66C 23/52). › de sistemas de canalizaciones por tuberías.
- B67D9/02 B […] › B67 APERTURA Y CIERRE DE BOTELLAS, TARROS O RECIPIENTES ANALOGOS; MANIPULACION DE LIQUIDOS. › B67D DISTRIBUCION, SUMINISTRO O TRANFERENCIA DE LIQUIDOS, NO PREVISTA EN OTRO LUGAR (limpieza de conducciones o tubos o de sistemas de conducciones o tubos B08B 9/02; limpieza, vaciado o llenado de botellas, tarros, botes, cubas, barriles o recipientes similares no previstos en otro lugar B67C; suministros de agua E03; sistemas de tuberías F17D; sistemas de suministro de agua caliente para uso doméstico F24D; medidas de volúmenes, de caudales, de gasto másico o de niveles de líquidos, cómputo volumétrico G01F; aparatos accionados por monedas o similares G07F). › B67D 9/00 Aparatos o dispositivos para transferir líquidos en la carga y descarga de barcos (equipo a bordo B63B 27/00). › utilizando conducciones articuladas.
PDF original: ES-2441273_T3.pdf
Fragmento de la descripción:
Dispositivo de control para sistema de transferencia de fluido en el mar.
La presente invención se refiere en general a sistemas para cargar y/o descargar fluidos para barcos, denominados habitualmente sistemas de carga marinos. Estos sistemas se utilizan para transferir un producto fluido entre un barco y un muelle o entre dos barcos, tales como se conoce por ejemplo a partir del documento US 4408943.
Se entiende que producto fluido significa un producto líquido o gaseoso.
Más particularmente, la presente invención se refiere a dispositivos para controlar el movimiento, posicionamiento y conexión de tales sistemas de carga y/o descarga.
Generalmente, los sistemas de carga marinos presentan un extremo de línea de transferencia de fluido que está fijado a una base y conectado a un depósito de fluido que va a transferirse, y un extremo de línea opuesto que es móvil y está dotado de un acoplamiento adaptado para conectarse a un conducto objetivo, conectado a su vez a un depósito de fluido.
Se conocen dos familias de sistemas de carga de fluido para barcos, que se distinguen por su estructura: sistemas para transferir mediante tuberías rígidas y sistemas para transferir mediante tuberías flexibles.
En la familia de los sistemas para transferir mediante tuberías rígidas, pueden distinguirse los sistemas de brazo de carga y sistemas de pantógrafo.
El brazo de carga es una disposición de sistemas de tuberías articuladas, que comprende una base, conectada a un depósito de fluido, en la que está montada una primera tubería, designada tubería interna, mediante una parte de tubo con un codo de 90º que permite el giro de uno de sus extremos sobre un eje vertical, y el otro extremo sobre un eje horizontal. En el extremo opuesto del tubo interno, una segunda tubería, designada tubería externa, está montada de manera giratoria sobre un eje horizontal. Un acoplamiento está montado en el extremo de la tubería externa. Cada uno de los tres giros se controla mediante un gato o motor hidráulico.
Los sistemas de pantógrafo, como los brazos de carga, comprenden una base conectada a un depósito. Una grúa está montada de manera giratoria en esa base. La grúa comprende un brazo de grúa que lleva una tubería para el fluido. En el extremo del brazo de grúa está montado un pantógrafo compuesto de tuberías articuladas para el fluido, y que permite mover un acoplamiento que está montado en el extremo libre del pantógrafo. La inclinación del pantógrafo se controla mediante un giro en el extremo del brazo de grúa. El movimiento del pantógrafo se controla mediante motores hidráulicos y mediante un gato para el giro en la base.
Por último, los sistemas de tuberías flexibles comprenden generalmente una línea en la que se transporta el producto fluido y un sistema mecánico que permite realizar maniobras con la línea. Hay varios tipos de sistemas de maniobra, pero en todos los casos incluyen una grúa o estructura de manipulación que soporta el acoplamiento para conectar las tuberías flexibles.
En general, el sistema de carga comprende un actuador en su extremo que permite sujetar o liberar el acoplamiento. En general, son uno o más gatos o uno o más motores hidráulicos.
En la práctica, en la mayoría de sistemas, el acoplamiento está articulado en su extremo con tres grados de libertad de giro. De este modo, es posible una orientación angular del plano del acoplamiento con respecto al plano del conducto objetivo independientemente de la inclinación del brazo, el plano del acoplamiento permanece paralelo al plano del conducto objetivo al aproximarse para la conexión, y después, una vez que el acoplamiento se ha sujetado sobre el conducto objetivo, estas articulaciones permiten un movimiento “flotante” del conjunto. En la práctica, los giros se controlan por el operario mediante motores hidráulicos o gatos hasta que se ha logrado la conexión del acoplamiento al conducto objetivo. Una vez que el acoplamiento se ha sujetado, los motores hidráulicos o gatos se desacoplan o “ponen en punto muerto” para permitir que el sistema de carga siga los movimientos del conducto objetivo sin restringir el acoplamiento.
Las dos familias de dispositivos de carga descritas anteriormente presentan diferencias estructurales, pero sus sistemas de control están diseñados según el mismo principio general de operación. Se ha observado que, en todos los casos, el acoplamiento presenta al menos tres grados de libertad con respecto a la base que soporta el extremo fijado del conducto, y que los movimientos en cada uno de estos grados de libertad se controlan independientemente mediante actuadores. El operario presenta una interfaz de comando que le permite controlar el movimiento del acoplamiento.
Cada actuador se controla o bien por separado mediante un control independiente de tipo encendido/apagado, o bien mediante un control proporcional simultáneo.
En el caso de los controles independientes de encendido/apagado, el operario puede actuar independientemente sobre cada uno de los controles para controlar un elemento particular del sistema de carga. La acción combinada sobre el grupo de actuadores permite posicionar el acoplamiento en un punto deseado en el espacio.
En el caso de los controles proporcionales, el operario presenta una interfaz de entrada de comando que comprende un control proporcional que coopera con una calculadora de manera que, actuando sobre dicho control proporcional en mayor o menor medida, conduce a al menos una instrucción de control proporcional que respectivamente presenta una mayor o menor medida para los correspondientes actuadores, dando como resultado un movimiento del acoplamiento a una velocidad de movimiento que es respectivamente mayor o menor.
Por tanto, el operario puede controlar directamente el movimiento del acoplamiento, y, por tanto, puede lograr en particular un movimiento del acoplamiento que es rectilíneo, y/o a velocidad constante, ya que la calculadora compone el movimiento del acoplamiento actuando sobre todos los actuadores simultáneamente.
En general, los actuadores utilizados son hidráulicos, por ejemplo un motor hidráulico o gato, pero también se conoce la utilización de actuadores eléctricos, por ejemplo motores eléctricos, o actuadores neumáticos. Los actuadores que equipan los sistemas de carga marinos se controlan o bien mediante control de encendido/apagado, con una velocidad constante de movimiento, y en ciertos casos, con la posibilidad de fijar dos velocidades de movimiento a voluntad para los controles independientes de tipo encendido/apagado, o bien mediante distribuidores proporcionales, en el caso de controles proporcionales.
En todos los casos, la conexión del acoplamiento al conducto objetivo se realiza manualmente, por tanto el operario realiza una maniobra con el sistema de carga, con o sin la intermediación de una calculadora de control, con el fin de conectar el acoplamiento en el conducto objetivo.
Estos dispositivos de control son difíciles de implementar, porque el operario debe conocer perfectamente el funcionamiento y la cinemática del sistema de carga marino. Además, debe compensar los movimientos del barco, en particular en el caso de mar gruesa. Esto aumenta el riesgo de que el acoplamiento golpee contra obstáculos o contra el conducto objetivo, lo que puede dañar los sellos del acoplamiento. Por tanto, la maniobra y la conexión requieren personal cualificado.
Se conoce un sistema que hace posible facilitar la conexión de un acoplamiento a un conducto objetivo en el que el acoplamiento se conecta de antemano mediante un cable al conducto objetivo. Se tira un cable entre el muelle o el barco que soporta la base y el barco que soporta el conducto objetivo, después se une por operarios entre el conducto objetivo y la base. Entonces, un cabestrante permite que el brazo se haga avanzar a lo largo del cable tensado y, por tanto, que el acoplamiento se desplace hacia el conducto objetivo. Este sistema se denomina comúnmente “sistema dirigido”. Es un sistema semiautomático: una vez que el cable se ha conectado, un operario debe controlar el movimiento del acoplamiento a lo largo del cable activando la operación de enrollado. Está previsto un cono de guía para la fase final de la aproximación. Una vez que el acoplamiento se ha acercado, un operario debe finalizar su conexión y su cierre manualmente.
Este modo de conexión semiautomática requiere personal experimentado y una estructura mecánica pesada adecuada (en particular un motor adaptado para desplazar el brazo a lo largo del cable, un punto de anclaje para el extremo opuesto del cable y un cono de guía para la aproximación en la fase final)... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de control (1) para el movimiento y posicionamiento de un acoplamiento (26) para un sistema (2) de carga marino, comprendiendo dicho sistema de carga marino al menos una línea de transferencia de fluido que 5 presenta un extremo de línea fijado a una base (21) , y un extremo de línea móvil provisto de un acoplamiento (26) para la conexión a un conducto objetivo (35) , presentando el acoplamiento al menos tres grados de libertad (A, B, C) con respecto a la base, estando el dispositivo caracterizado porque comprende al menos tres actuadores (27, 28, 29) , estando cada uno de ellos destinado a controlar el movimiento del sistema en un grado de libertad, y porque el dispositivo de control comprende al menos unos medios (33, 34) para proporcionar información sobre el
posicionamiento del acoplamiento adaptados para su posicionamiento en al menos un elemento del grupo acoplamiento/conducto objetivo o un elemento en la inmediata proximidad de al menos uno de entre los elementos del grupo acoplamiento/conducto objetivo y porque el dispositivo comprende además unos medios de cálculo (41) adaptados para:
calcular el posicionamiento relativo del acoplamiento directamente con respecto al conducto objetivo según la información proporcionada por los medios de información de posicionamiento del acoplamiento,
calcular las instrucciones de control que se van a dar a cada uno de los actuadores, de manera que sus movimientos combinados den como resultado un movimiento del acoplamiento destinado a aproximar el
acoplamiento al conducto objetivo,
aplicar dichas instrucciones de control para aproximar el acoplamiento al conducto objetivo,
reiterar las tres etapas anteriores hasta que el acoplamiento esté presente delante del conducto objetivo en una 25 posición para la conexión, y
al menos uno de los elementos del grupo acoplamiento/conducto objetivo o un elemento fijado con respecto a al menos uno de los elementos del grupo acoplamiento/conducto objetivo comprende al menos unos medios (34) para proporcionar información sobre el posicionamiento del conducto objetivo y porque los medios de cálculo están adaptados para deducir, basándose en la información sobre el posicionamiento del conducto y en la información sobre el posicionamiento del acoplamiento proporcionada por dichos al menos dos medios para proporcionar información de posicionamiento (33, 34) , el posicionamiento relativo del acoplamiento (26) con respecto al conducto objetivo (35) y,
los medios (34) para proporcionar información sobre el posicionamiento del conducto objetivo incluyen un dispositivo de un sistema para posicionamiento global, en particular de tipo GPS, que posibilita proporcionar una posición absoluta del conducto objetivo, estando los medios de cálculo adaptados para calcular, basándose en la información sobre el posicionamiento absoluto del conducto objetivo, el posicionamiento relativo del acoplamiento con respecto al conducto objetivo.
2. Dispositivo según la reivindicación 1, caracterizado porque el acoplamiento (26) está articulado en su extremo con tres grados de libertad de giro y porque al menos uno de los tres giros es controlado por un actuador, estando el dispositivo provisto de unos medios para proporcionar información sobre la orientación angular del acoplamiento y unos medios para proporcionar información sobre la orientación angular del conducto objetivo, estando los medios 45 de cálculo (41) adaptados para calcular, basándose en la información proporcionada por los medios para proporcionar información sobre la orientación angular, las instrucciones de control que se van a dar a dicho al menos un actuador para que la orientación angular del acoplamiento (26) , en posición para la conexión, sea sustancialmente la misma que la orientación angular del conducto objetivo (35) .
6. Dispositivo según cualquiera de las reivindicaciones anteriores, caracterizado porque los medios (33) para proporcionar información sobre el posicionamiento del acoplamiento incluye un dispositivo de un sistema para posicionamiento global, en particular de tipo GPS, que posibilita proporcionar una posición absoluta del acoplamiento, estando los medios de cálculo adaptados para calcular, basándose en la información sobre el posicionamiento absoluto del acoplamiento y del conducto objetivo, el posicionamiento relativo del acoplamiento con respecto al conducto objetivo.
7. Dispositivo según la reivindicación 6, caracterizado porque los dispositivos para posicionamiento global, en particular de tipo GPS (33, 34) , son unos dispositivos diseñados para comunicarse entre sí y comprenden unos medios de cálculo para calcular y proporcionar directamente información sobre el posicionamiento relativo del acoplamiento con respecto al conducto objetivo.
8. Dispositivo según cualquiera de las reivindicaciones anteriores, caracterizado porque uno de los medios para proporcionar información sobre el posicionamiento del acoplamiento o del conducto objetivo incluye un dispositivo óptico (76, 78) adaptado para cooperar con el conducto objetivo o el acoplamiento, respectivamente, o un objetivo que es fijo con respecto al conducto objetivo o con respecto al acoplamiento respectivamente, emitiendo un haz (78) luminoso, tal como un haz de láser, hacia el conducto objetivo o el acoplamiento o un objetivo que es fijo con respecto al conducto objetivo o el acoplamiento, respectivamente, y para detectar el haz reflejado y para medir el tiempo de recorrido del haz para deducir a partir del mismo información sobre el posicionamiento relativo del acoplamiento directamente con respecto al conducto objetivo.
9. Dispositivo según cualquiera de las reivindicaciones anteriores, caracterizado porque los medios para proporcionar información sobre el posicionamiento del acoplamiento incluyen una cámara (70) óptica, diseñada y montada para proporcionar una imagen del acoplamiento a los medios de cálculo, estando los medios de cálculo adaptados para procesar la imagen proporcionada por la cámara para calcular el posicionamiento relativo del acoplamiento con respecto al conducto objetivo.
10. Dispositivo según cualquiera de las reivindicaciones anteriores, caracterizado porque al menos una cuerda (75) es tensada utilizando un carrete (72) entre el acoplamiento y el conducto objetivo y porque los medios para proporcionar información sobre el posicionamiento son al menos un sensor angular (74) y/o al menos un sensor de longitud de cuerda desenrollada (73) en el carrete, seleccionados de modo que proporcionen a los medios de cálculo
(41) información que posibilite calcular el posicionamiento relativo del acoplamiento con respecto al conducto objetivo.
11. Dispositivo según cualquiera de las reivindicaciones anteriores, caracterizado porque al menos uno de los actuadores (27, 28, 29) , cada uno para controlar el movimiento del sistema en un grado de libertad, es un actuador de control proporcional.
12. Dispositivo según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende una interfaz
(60) de comando para un operario, y porque la comunicación entre la interfaz (60) de comando y los medios de cálculo se realiza de manera inalámbrica, comprendiendo la interfaz de comando un transmisor para la comunicación inalámbrica con un receptor conectado a los medios de cálculo.
13. Dispositivo según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende al menos dos medios (33, 34, 77, 76) para proporcionar información sobre el posicionamiento del acoplamiento, posibilitando uno de ellos determinar el posicionamiento del acoplamiento con mayor precisión (77, 76) que el otro (33, 34) y porque los medios de cálculo (41) utilizan, para el posicionamiento del acoplamiento, los medios de posicionamiento que presentan mayor precisión cuando la distancia entre el acoplamiento y el conducto objetivo se vuelve menor que una distancia predefinida.
14. Dispositivo según cualquiera de las reivindicaciones anteriores, caracterizado porque dichos al menos unos medios (33) para proporcionar información sobre el posicionamiento del acoplamiento están o bien adaptados para cooperar directamente con unos medios para proporcionar información sobre el posicionamiento de la base dispuesto en la base (33) o en un elemento que es fijo con respecto a la base para proporcionar, basándose en la información sobre el posicionamiento de la base, información sobre el posicionamiento relativo del acoplamiento directamente con respecto a la base, o adaptado para proporcionar información sobre el posicionamiento absoluto del acoplamiento en el espacio, y, presentando la base una posición fijada en el espacio, el dispositivo comprende unos medios de cálculo que posibilitan calcular, basándose en la información sobre el posicionamiento absoluto del acoplamiento y los datos sobre el posicionamiento de la base fijada en el espacio, información sobre el posicionamiento relativo del acoplamiento directamente con respecto a la base, comprendiendo además el dispositivo unos medios de cálculo adaptados para:
calcular, en tiempo real, según los movimientos del acoplamiento con respecto a la base, la información sobre el posicionamiento del acoplamiento con respecto a la base, siendo parametrizados los datos que definen al menos una zona de posicionamiento autorizada para el acoplamiento en los medios de cálculo,
comprobar, en tiempo real, si el acoplamiento está ubicado dentro de la zona autorizada,
emitir una alarma específica cuando el acoplamiento abandona la zona autorizada correspondiente para avisar al operario. 5
15. Dispositivo según la reivindicación anterior, caracterizado porque los medios de cálculo (41) están adaptados para detener la aplicación de las instrucciones de control que se van a dar a cada uno de los actuadores para transmitir movimiento al acoplamiento.
16. Dispositivo según cualquiera de las reivindicaciones anteriores, caracterizado porque varios sistemas de carga marinos están conectados a los medios de cálculo (41) , y porque está previsto un selector en la interfaz (60) de comando para controlar selectivamente uno de los sistemas de carga conectados a los medios de cálculo.
17. Calculadora (41) para un dispositivo según cualquiera de las reivindicaciones anteriores, caracterizada porque 15 está adaptada para:
calcular el posicionamiento relativo del acoplamiento con respecto al conducto objetivo según la información proporcionada por los medios para proporcionar información sobre el posicionamiento del acoplamiento,
calcular las instrucciones de control que se van a proporcionar a cada uno de los actuadores, de manera que sus movimientos combinados den como resultado un movimiento del acoplamiento destinado a aproximar el acoplamiento al conducto objetivo,
aplicar dichas instrucciones de control para aproximar el acoplamiento al conducto objetivo hasta que esté 25 presente delante del conducto objetivo en una posición para la conexión.
18. Procedimiento de cálculo para unos medios de cálculo de un dispositivo según cualquiera de las reivindicaciones 1 a 16, caracterizado porque comprende las etapas de cálculo que consisten en:
calcular el posicionamiento relativo del acoplamiento con respecto al conducto objetivo según la información proporcionada por los medios para proporcionar información sobre el posicionamiento del acoplamiento,
calcular las instrucciones de control que se van a dar a cada uno de los actuadores, de manera que sus movimientos combinados den como resultado un movimiento del acoplamiento destinado a aproximar el
acoplamiento al conducto objetivo,
aplicar dichas instrucciones de control para aproximar el acoplamiento al conducto objetivo hasta que esté presente frente al conducto objetivo en una posición para la conexión.
19. Sistema (2) de carga marino o conjunto de sistemas de carga marinos, que comprende al menos una línea de transferencia de fluido que presenta un extremo de línea fijado a una base (21) y un extremo de línea móvil provisto de un acoplamiento (26) adaptado para la conexión a un conducto objetivo (35) y que presenta al menos tres grados de libertad (A, B, C) con respecto a la base, y un dispositivo de control (1) según cualquiera de las reivindicaciones 1 a 16.
Patentes similares o relacionadas:
Limitación de daños en un buque con un sistema de tuberías, del 20 de Noviembre de 2019, de ThyssenKrupp Marine Systems GmbH: Buque con un sistema de tuberías y un sistema de control, en donde el sistema de tuberías sirve para abastecer al menos a un primer consumidor, en […]
Buque para el suministro de gas combustible licuado, del 13 de Noviembre de 2019, de DAEWOO SHIPBUILDING & MARINE ENGINEERING CO., LTD: Un buque de repostaje para el repostaje de gas combustible licuado a un buque de propulsión a gas combustible licuado en el mar, en donde el buque repostaje […]
Embarcación de abastecimiento mar adentro, del 12 de Junio de 2019, de Kongsberg Maritime CM AS: Barco de abastecimiento mar adentro para trasporte de cargamento, que comprende una, en lo principal, cubierta abierta , varios tanques de cargamento que […]
Brazo de transferencia de producto fluido de buque a tierra o de buque a buque, del 22 de Mayo de 2019, de FMC Technologies: Brazo de transferencia para un producto fluido, que comprende una o más tuberías de transferencia que presentan varias secciones unidas entre sí mediante […]
Dispositivo de acoplamiento de seguridad provisto de válvulas de cierre para acoplar dos partes de un conducto de fluido, del 15 de Mayo de 2019, de KANON LOADING EQUIPMENT B.V: Dispositivo de acoplamiento de seguridad para acoplar dos partes de un conducto de fluido, que comprende un par de cuerpos de acoplamiento cooperantes […]
 Sistema de transporte de fluido con un acoplamiento de liberación automática y uso del mismo, del 13 de Marzo de 2019, de Ocean Team Group A/S: Un procedimiento para cambiar el aceite de una caja de engranajes en una góndola de un generador de turbina eólica con un sistema para el transporte de fluido, comprendiendo […]
Sistema de transporte de fluido con un acoplamiento de liberación automática y uso del mismo, del 13 de Marzo de 2019, de Ocean Team Group A/S: Un procedimiento para cambiar el aceite de una caja de engranajes en una góndola de un generador de turbina eólica con un sistema para el transporte de fluido, comprendiendo […]
Sistema y método para evitar la evaporación de una carga líquida en un barco, del 6 de Febrero de 2019, de DAEWOO SHIPBUILDING & MARINE ENGINEERING CO., LTD: Un sistema para evitar la evaporación de una carga líquida en un barco, que evita la generación de gas de evaporación cuando la carga líquida se carga en […]
Sistema de transferencia de un fluido, principalmente gas de petróleo licuado, entre una primera instalación de superficie y una segunda instalación de superficie, del 4 de Febrero de 2019, de TECHNIP FRANCE: Sistema de transferencia de fluido entre una primera instalación de superficie y una segunda instalación de superficie que comprende un conducto tubular […]