Aparato y procedimiento de codificación para nodo interpolador de orientación.
Un aparato de codificación para codificar información de rotación que incluye el tiempo de rotación,
los ejes derotación y el ángulo de rotación que se necesitan para girar un objeto tridimensional en un espacio tridimensional, estando el aparato de codificación dispuesto para recibir claves que indican información con respecto a un trayectode animación en una posición sobre un eje de tiempos, en el cual ocurre un cambio de un movimiento rotatorio, ypara recibir valores de claves que indican información de rotación correspondiente a la información de posición, ycaracterizado por comprender:
una unidad (801) de conversión de cuaterniones, para convertir la información de rotación de un valor de clave deentrada en un valor de expresión de cuaterniones, que está expresado por un número real y tres números imaginarios;
una unidad (802) de eliminación de tramas de clave, para seleccionar claves y valores de clave convertidos, paraproporcionar la pluralidad de claves y valores de clave seleccionados y para eliminar los restantes claves y valoresde clave, siendo seleccionados las claves y los valores de clave seleccionados de modo que el error medio entre eltrayecto de animación original y un trayecto de animación interpolado reduzca el error medio a valores dentro de unlímite de errores predeterminado;
una unidad (803) diferencial lineal / rotacional para el procesamiento diferencial lineal de cada clave seleccionada, calculando como la clave procesada diferencial la diferencia entre la clave y una clave previa, y el procesamientodiferencial rotacional de los valores de clave seleccionados, calculando como los valores de clave procesadosdiferenciales la rotación requerida para llegar al cuaternión que representa el valor de clave, a partir del cuaterniónque representa un valor de clave anterior;
una unidad (805) de cuantización para cuantizar la clave procesada diferencial y los valores de claves procesadasdiferenciales;
una unidad (806) de cuantización inversa para cuantizar inversamente los valores diferenciales de las claves y losvalores de clave cuantizados;
una unidad (804) de acumulación lineal / rotacional para acumular claves y valores de clave inversamente cuantizados, para su uso en el procesamiento diferencial de una clave y de valores de clave en el próximo instanteen el tiempo, a fin de compensar los errores de cuantización;
una unidad (807) diferencial lineal para el procesamiento diferencial lineal de los valores de clave cuantizados, obteniendo las diferencias entre los valores de clave cuantizados y un anterior valor de clave cuantizada; y
una unidad (809) de codificación de entropía para la codificación aritmética de la cuantización de claves y valores declave.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05077826.
Solicitante: SAMSUNG ELECTRONICS CO., LTD..
Nacionalidad solicitante: República de Corea.
Dirección: 129, Samsung-ro, Yeongtong-gu Suwon-si, Gyeonggi-do,443-742 REPUBLICA DE COREA.
Inventor/es: KIM, SUNG-JIN, KIM, DO-KYOON, JUNG, SEOK-YOON, WOO, SANG-OAK.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H04N7/24 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › H04N 7/00 Sistemas de televisión (detalles H04N 3/00, H04N 5/00; métodos y arreglos, para la codificación, decodificación, compresión o descompresión de señales de vídeo digital H04N 19/00; distribución selectiva de contenido H04N 21/00). › Sistemas para la transmisión de señales de televisión que utilizan la modulación por impulsos codificados (H04N 21/00 tiene prioridad).
- H04N7/26
- H04N7/36
PDF original: ES-2417529_T3.pdf
Fragmento de la descripción:
Aparato y procedimiento de codificación para nodo interpolador de orientación.
La presente invención se refiere a una codificación sintética de la imagen y, de manera más particular, a un aparatoy a un procedimiento de codificación para un nodo interpolador de orientación.
El formato binario para escenas (BIFS) de MPEG-4, que es uno de varios estándares multimedia internacionales, da soporte a una tecnología de representación de animación basada en tramas clave, entre una amplia variedad detecnologías para representar información de animación, usadas en una imagen sintética. Los datos que forman laanimación basada en tramas clave están representados por claves y por valores clave que están expresados en lasintaxis de nodo interpolador en los BIFS de MPEG-4. En los BIFS de MPEG-4, se necesita una gran cantidad dedatos de claves y valores de clave para proporcionar una animación tersa de las tramas clave. Una trama clave consiste en una clave y en un valor de clave. Una clave que representa un instante específico en el que se expresala animación es un número entre -0 y 0, ambos inclusive. Los valores de clave representan la información sobre elgiro de un objeto en una imagen sintética, en un instante indicado en cada clave. La información sobre el giro delobjeto en un instante distinto al instante indicado por cada clave se obtiene mediante la interpolación entre losvalores de clave correspondientes a dos claves: una indica el instante anterior más cercano y la otra indica el instante siguiente más cercano. En este instante, según el tipo de nodo interpolador, se usan diferentes procedimientos de interpolación.
Un procedimiento de interpolación que usa la información sobre la rotación de un objeto expresa el movimiento derotación con ejes de rotación y un ángulo de rotación. Al igual que un Lenguaje de Modelado de la Realidad Virtual (Virtual Reality Modelling Language, VRML) , el BIFS de MPEG-4 da soporte a la información de rotación, que se expresa con ejes de rotación y con un ángulo de rotación, como se ha descrito anteriormente, a través de un nodointerpolador de la orientación. Esto es, usando un procedimiento de expresión del desplazamiento angular paraexpresar los ejes y el ángulo de rotación, el nodo interpolador de la orientación expresa la información de rotación yproporciona información de rotación como valores de clave. Cuando los datos de valores de clave expresan unaanimación tersa de acuerdo con una característica de interpolación, la distribución de los valores de diferencia entre conjuntos de valores de clave sucesivos es compacta.
Por lo tanto, es eficaz usar un procedimiento de codificación que use valores diferenciales entre los conjuntos dedatos. En los BIFS de MPEG-4, se usan dos procedimientos representativos para la codificación de datos decampos que estén representados por una clave y valores de clave de un nodo interpolador de la orientación, y quese vayan a procesar: un procedimiento que no use la Modulación Diferencial de Códigos de Impulsos (DPCM) y un procedimiento que use la DPCM.
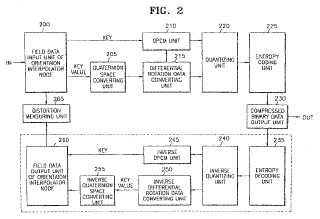
En primer lugar, en el procedimiento que no usa la DPCM, solamente se realiza la cuantización con respecto a las claves y a los valores de clave de los datos que se vayan a codificar. Por lo tanto, como las únicas características delos datos que se van a codificar no se consideran, el procedimiento es ineficaz. El procedimiento que no usa laDPCM se explicará brevemente a continuación. Se introducen los datos de campos de un nodo interpolador de la orientación y se convierten los valores de clave de los datos de campos en valores de un espacio de cuaterniones. A continuación, se ajusta la precisión de datos de la clave o de los valores de clave, y las claves y los valores de claveson cuantizados. Después, los datos de campos cuantizados se emiten como datos en formato binario. A continuación, con el fin de comprobar el resultado de la cuantización, los datos en formato binario emitidos serestauran como datos de campos mediante la cuantización inversa, y cada valor de cuaternión restaurado es correlacionado con un formato de valor de clave que está formado por ejes de rotación y un ángulo de rotación. Acontinuación, se guardan los datos de campos restaurados del nodo de orientación y se emiten a una pantalla.También, usando los datos, se mide la distorsión visual de un error de cuantización. La distorsión D se podría medir mediante la siguiente ecuación 1:
Aquí, N representa el número de datos de campos, ci representa la diferencia entre un valor (Qi) que se vaya a ~
codificar en el momento actual y un valor restaurado ( Qi ) .
A continuación, el procedimiento que usa la DPCM considera la correlación entre conjuntos de datos sucesivos y, por lo tanto, puede mejorar la eficacia de codificación más que el procedimiento que no usa DPCM. Las diferenciasentre los dos procedimientos se explicarán a continuación brevemente. En el procedimiento que usa la DPCM, el valor de la diferencia entre los valores de clave restaurados anteriormente y un valor que vaya a ser codificado en elmomento actual se calcula antes de la cuantización, y se cuantiza el valor de la diferencia. Al hacerlo así, las características de los datos que aparecieron en esta diferenciación mejoran la eficacia de codificación hasta ciertogrado.
La FIG. 1 es un diagrama de bloques para explicar el principio general de la DPCM. 2
Una unidad 100 de DPCM calcula el valor (Ei) de diferencia entre un valor (Qi) que vaya a ser codificado en el
~
momento actual y un valor restaurado ( Qi -1) , usando un sumador 102. El valor calculado se cuantiza en un cuantizador 120. El valor cuantizado ( Eˆ i) se envía a un destino y a un cuantizador inverso 140, mediante el cual, el
valor cuantizado ( Eˆ i) es cuantizado inversamente ( Ei) .
Sin embargo, en un Interpolador de Orientación que interpola entre valores de clave continuos mediante la interpolación lineal esférica, el procedimiento de DPCM mostrado en la FIG. 1 no puede tener una alta eficacia. Estopuede hallarse cuando se analizan en un espacio de cuaterniones los valores de clave que determinan la posiciónrotacional de un objeto.
Un valor (q) de clave que determina la posición rotacional de un objeto en un espacio de tres dimensiones seexpresa como una combinación de ejes de rotación y de un ángulo de rotación. En las siguientes ecuaciones 2, la ecuación (aa) muestra cómo el Interpolador de Orientación expresa un valor de clave, y la ecuación (bb) es unaecuación para convertir el valor de clave en un cuaternión.
Como se muestra en la ecuación (bb) , si los vectores del eje de rotación y los ángulos de rotación de doscuaterniones tienen los mismos valores absolutos y signos opuestos en el espacio de cuaterniones, los dos cuaterniones son los mismos. Esto significa que, en el aspecto físico, dos movimientos de rotación son los mismos ylos factores que afectan a una transformación de rotación son la dirección del eje de rotación y el ángulo de rotación, y no los vectores del eje de rotación. Por lo tanto, la expresión de cuaterniones que representa la transformación derotación de un objeto expresa de manera exitosa la dirección del eje de rotación y el ángulo de rotación, que sonfactores que afectan a la transformación de rotación.
Mientras tanto, el procedimiento de DPCM de la FIG. 1, en el que se usa la ecuación (aa) para calcular los valoresde diferenciales temporales entre los valores de clave que indican transformaciones de rotación, considera ladiferencia entre los vectores de eje de rotación y, por lo tanto, no muestra correlación de cambios en las direccionesdel eje de rotación con respecto a los cambios temporales y se reduce la eficacia en la codificación.
El documento de patente estadounidense 4.797.836 revela un procedimiento para orientar y animar imágenes de vídeo usando cuaterniones para proporcionar rotaciones tersas y predecibles en un dispositivo de efectos de vídeodigital.
En un primer aspecto de la presente invención, se proporciona un aparato de codificación para codificar informaciónde rotación según la reivindicación 1.
En un segundo aspecto de la presente invención, se proporciona un procedimiento de codificación según la reivindicación 6.
Los objetos y las ventajas anteriores de la presente invención devendrán más evidentes mediante la descripción endetalle de las realizaciones preferidas de la misma, con referencia a los dibujos adjuntos, en los que:
la FIG. 1 es un diagrama de bloques para explicar el principio general de la modulación diferencial de códigos deimpulsos (DPCM) ;
las FIGS. 2 a 7 son diagramas para explicar... [Seguir leyendo]
Reivindicaciones:
1. Un aparato de codificación para codificar información de rotación que incluye el tiempo de rotación, los ejes derotación y el ángulo de rotación que se necesitan para girar un objeto tridimensional en un espacio tridimensional, estando el aparato de codificación dispuesto para recibir claves que indican información con respecto a un trayectode animación en una posición sobre un eje de tiempos, en el cual ocurre un cambio de un movimiento rotatorio, ypara recibir valores de claves que indican información de rotación correspondiente a la información de posición, ycaracterizado por comprender:
una unidad (801) de conversión de cuaterniones, para convertir la información de rotación de un valor de clave deentrada en un valor de expresión de cuaterniones, que está expresado por un número real y tres números imaginarios;
una unidad (802) de eliminación de tramas de clave, para seleccionar claves y valores de clave convertidos, paraproporcionar la pluralidad de claves y valores de clave seleccionados y para eliminar los restantes claves y valoresde clave, siendo seleccionados las claves y los valores de clave seleccionados de modo que el error medio entre eltrayecto de animación original y un trayecto de animación interpolado reduzca el error medio a valores dentro de unlímite de errores predeterminado;
una unidad (803) diferencial lineal / rotacional para el procesamiento diferencial lineal de cada clave seleccionada, calculando como la clave procesada diferencial la diferencia entre la clave y una clave previa, y el procesamientodiferencial rotacional de los valores de clave seleccionados, calculando como los valores de clave procesadosdiferenciales la rotación requerida para llegar al cuaternión que representa el valor de clave, a partir del cuaterniónque representa un valor de clave anterior;
una unidad (805) de cuantización para cuantizar la clave procesada diferencial y los valores de claves procesadasdiferenciales;
una unidad (806) de cuantización inversa para cuantizar inversamente los valores diferenciales de las claves y losvalores de clave cuantizados;
una unidad (804) de acumulación lineal / rotacional para acumular claves y valores de clave inversamente cuantizados, para su uso en el procesamiento diferencial de una clave y de valores de clave en el próximo instanteen el tiempo, a fin de compensar los errores de cuantización;
una unidad (807) diferencial lineal para el procesamiento diferencial lineal de los valores de clave cuantizados, obteniendo las diferencias entre los valores de clave cuantizados y un anterior valor de clave cuantizada; y
una unidad (809) de codificación de entropía para la codificación aritmética de la cuantización de claves y valores declave.
2. El aparato de codificación de la reivindicación 1, en el cual la unidad (803) diferencial lineal / rotacional realiza latransformación de rotación para una próxima posición del objeto después de un movimiento de rotación desde laposición actual, obteniendo un diferencial de rotación entre los valores de clave correspondientes a claves continuas, mediante una ecuación diferencial de rotación en un espacio de cuaterniones, según la siguiente ecuación 38:
3. El aparato de codificación de la reivindicación 1 o 2, en el cual la unidad (803) de procesamiento diferencial lineal /rotacional incluye una unidad de corrección de dirección de rotación para realizar una función de corrección dedirección de rotación que hace que el objeto gire en la misma dirección que la dirección de rotación indicada por lainformación de rotación original.
4. El aparato de codificación de la reivindicación 3, en el cual la unidad de corrección de dirección de rotacióncomprende:
una unidad (970) de saturación de dirección de rotación, para generar información de rotación saturada y emitir lainformación;
una unidad (960) de determinación para determinar si la dirección de rotación cambió o no; y
una unidad (980) de selección para recibir selectivamente y emitir la salida de la unidad (803) diferencial lineal / rotacional, o la salida de la unidad (970) de saturación de dirección de rotación, en base al resultado de ladeterminación por parte de la unidad (960) de determinación.
5. El aparato de codificación de la reivindicación 4, en el cual, cuando el resultado de la determinación, por parte dela unidad (960) de determinación, indica que la dirección de rotación cambió, la unidad (980) de selección recibe yemite la salida de la unidad (970) de saturación de dirección de rotación, en lugar de un valor diferencial de rotaciónemitido desde la unidad (803) de procesamiento diferencial lineal / rotacional y, en otro caso, la unidad (980) deselección recibe y emite un valor diferencial de rotación emitido desde la unidad (803) de procesamiento diferenciallineal / rotacional.
6. Un procedimiento de codificación para codificar información de rotación que incluye el tiempo de rotación, los ejesde rotación, y el ángulo de rotación que se necesitan para girar un objeto tridimensional en un espacio tridimensionaldespués de recibir claves que indican información con respecto a un trayecto de animación en una posición sobre un
eje de tiempos, en el cual ocurre un cambio de un movimiento rotacional, y valores de clave, que indican informaciónde rotación correspondiente a la información de posición, incluyendo el procedimiento de codificación las etapas de:
convertir la información de rotación de un valor de clave de entrada en un valor de expresión de cuaterniones, queestá expresado por un número real y tres números imaginarios;
seleccionar claves y valores de claves convertidos para proporcionar una pluralidad de claves seleccionadas y valores de clave, y para eliminar las restantes claves y valores de clave, siendo seleccionadas las claves y losvalores de clave seleccionados de modo que el error medio entre el trayecto de animación original y un trayecto deanimación interpolado reduzca el error medio a un valor dentro de un límite de error predeterminado;
procesamiento diferencial lineal de cada clave seleccionada, calculando como la clave procesada diferencial la
diferencia entre la clave y una clave previa, y procesamiento diferencial rotacional de los valores de clave seleccionados, calculando como los valores de claves procesadas diferenciales la rotación requerida para llegar alcuaternión que representa el valor de clave, a partir del cuaternión que representa un valor de clave previo;
cuantizar la clave procesada diferencial y los valores de clave procesados diferenciales;
cuantizar inversamente los valores diferenciales de la clave y los valores de clave cuantizados;
acumular claves y valores de clave inversamente cuantizados para su uso en el procesamiento diferencial de una clave y valores de clave en un próximo punto en el tiempo, a fin de compensar los errores de cuantización;
procesamiento diferencial lineal de los valores de clave cuantizados, obteniendo las diferencias entre los valores declave cuantizados y un valor anterior de clave cuantizada; y
codificar por entropía aritmética la clave y los valores de clave cuantizados.
Patentes similares o relacionadas:
Sistema y método para codificación y decodificación aritmética, del 29 de Abril de 2020, de NTT DOCOMO, INC.: Método de decodificación aritmética para convertir una secuencia de información compuesta por una secuencia de bits en una secuencia de eventos binarios compuesta […]
 Filtro de desbloqueo condicionado por el brillo de los píxeles, del 25 de Marzo de 2020, de DOLBY INTERNATIONAL AB: Método para desbloquear datos de píxeles procesados con compresión de vídeo digital basado en bloque, incluyendo los pasos:
- recibir […]
Filtro de desbloqueo condicionado por el brillo de los píxeles, del 25 de Marzo de 2020, de DOLBY INTERNATIONAL AB: Método para desbloquear datos de píxeles procesados con compresión de vídeo digital basado en bloque, incluyendo los pasos:
- recibir […]
Método para codificar y descodificar imágenes B en modo directo, del 19 de Febrero de 2020, de Godo Kaisha IP Bridge 1: Un método para generar y descodificar una secuencia de bits de una imagen B objetivo, en donde generar la secuencia de bits de la imagen B objetivo incluye las siguientes […]
Interpolación mejorada de cuadros de compresión de vídeo, del 4 de Diciembre de 2019, de DOLBY LABORATORIES LICENSING CORPORATION: Un método para compresión de imágenes de video usando predicción en modo directo, que incluye: proporcionar una secuencia de cuadros predichos […]
Interpolación mejorada de cuadros de compresión de vídeo, del 4 de Diciembre de 2019, de DOLBY LABORATORIES LICENSING CORPORATION: Un método de compresión de imágenes de video que comprende: proporcionar una secuencia de cuadros referenciables (I, P) y predichos bidireccionales […]
Capa de sectores en códec de vídeo, del 27 de Noviembre de 2019, de Microsoft Technology Licensing, LLC: Un procedimiento de decodificación de vídeo e imágenes, que comprende: decodificar una imagen de un flujo de bits codificado que tiene una jerarquía […]
Transformación solapada condicional, del 20 de Noviembre de 2019, de Microsoft Technology Licensing, LLC: Un método para codificar un flujo de bits de vídeo utilizando una transformación solapada condicional, en donde el método comprende: la señalización de un modo de filtro […]
Técnica para una simulación del grano de película exacta de bits, del 4 de Septiembre de 2019, de InterDigital VC Holdings, Inc: Un procedimiento para simular un grano de película en un bloque de imagen que comprende: calcular el promedio de los valores de luminancia de píxeles dentro del bloque de […]