Aparato para clasificar automáticamente productos farmacéuticos envasados.
Un aparato para clasificar automáticamente productos farmacéuticos envasados,
comprendiendo el aparato:
- un conjunto de medios de manipulación (11, 14, 17, 21, 22, 23, 25, 37) para coger envases farmacéuticos (P) de unreceptáculo de entrada (13) donde están dispuestos aleatoriamente diferentes tipos de envases y transferir losenvases a lo largo de un camino dado hasta una estación de salida final donde los envases (P) deben ser colocadosindividualmente y orientados de un modo predeterminado, y
- una pluralidad de lectores de códigos de barras (34) situados a lo largo de dicho camino, para identificar losproductos farmacéuticos;
por lo cual el aparato comprende una estación de orientación de envase que incluye una cinta transportadorahorizontal (17) asociada con una superficie de apoyo (18) fija y rectilínea; caracterizado porque la superficie deapoyo (18) se extiende en una dirección sustancialmente perpendicular a la dirección de avance de la cintatransportadora horizontal (17), por lo cual el movimiento de la cinta horizontal (17) hace que una cara de cadaenvase (P) se apoye contra la superficie de apoyo fija (18).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10160715.
Solicitante: BERTERO TECHNOLOGIES S.A.S. DI BERTERO SEBASTIANO.
Nacionalidad solicitante: Italia.
Dirección: Via Cartignano 11 2100 Cuneo ITALIA.
Inventor/es: Bertero,Sebastiano.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G47/14 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › colocando o presentando los objetos por medios mecánicos o neumáticos durante la alimentación (durante el transporte por el transportador B65G 47/24, B65G 47/26).
- B65G47/24 B65G 47/00 […] › que presentan los objetos según una orientación dada.
- B65G47/244 B65G 47/00 […] › haciéndolos girar alrededor de un eje sensiblemente perpendicular al plano de transporte.
- B65G47/252 B65G 47/00 […] › alrededor de un eje sensiblemente perpendicular a la dirección de transporte.
- B65G47/30 B65G 47/00 […] › durante el transporte por una serie de transportadores.
PDF original: ES-2412270_T3.pdf
Fragmento de la descripción:
Aparato para clasificar automáticamente productos farmacéuticos envasados La presente invención se refiere a un aparato para clasificar automáticamente productos farmacéuticos envasados de acuerdo con el preámbulo de la reivindicación 1 como se describe en el documento IT 1240627 B.
El suministro de productos enumerados en el pedido de la farmacia llega típicamente en una única caja, cuyo contenido se ha de clasificar y almacenar ordenadamente mientras simultáneamente se actualiza la base de datos informatizada que se utiliza en las farmacias modernas para gestionar las existencias.
Recientemente, se han propuesto sistemas de clasificación automática utilizando robots de manipulación mecánicamente complejos y cámaras de video para comprender e identificar los productos farmacéuticos a través de la lectura de los códigos de barras situados en los envases.
Es un objeto de la presente invención proporcionar un aparato automático, mecánicamente simple, seguro y que tenga costes bajos de instalación y mantenimiento.
De acuerdo con la invención, tal propósito se logra gracias a un aparato que tiene las características de la reivindicación 1 adjunta.
Ahora se describirá una realización preferida pero no limitativa de un aparato de acuerdo con la invención, ilustrada esquemáticamente en la vista en perspectiva del dibujo adjunto.
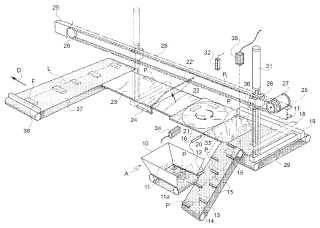
Una estación de entrada indicada A comprende una tolva de carga 10 utilizada como receptáculo de entrada en la que se cargan aleatoriamente, desde arriba, una multitud de envases de forma paralelepípeda P que contienen productos farmacéuticos, cada uno de los cuales está etiquetado y lleva un código de barras que, como se sabe, proporciona información que puede leerse con dispositivos ópticos con relación al fármaco.
En el aparato de la presente invención, los envases individuales se manipulan, identifican y transfieren uno cada vez, desde la tolva de carga hasta una estación de salida final; aquí cada envase se debe colocar con precisión y orientado de un modo predeterminado para que pueda ser correctamente cogido por un robot de manipulación, que retira el envase único y lo reemplaza ordenada y selectivamente en una estantería predeterminada del almacén de la farmacia.
La parte inferior de la tolva 10 se compone de un primera cinta transportadora horizontal 11, cuyo brazo superior se mueve hacia un extremo 11a del transportador en el que se proporciona una célula fotoeléctrica 12. Los envases varios de productos farmacéuticos, recibidos por el farmacéutico después de un pedido anterior, se vierten en la tolva 10. Pulsando un botón de inicio del ciclo (no ilustrado) , se acciona un motor eléctrico que impulsa la cinta11.
Cuando un envase llega cerca del borde 11a, la fotocélula 12 lo detecta y emite una señal eléctrica que hace que la cinta reduzca velocidad. Esto se hace para llevar a cabo una primera separación aproximada de los envases, haciéndoles caer uno cada vez sobre el borde 11a dentro del receptáculo 12.
La parte inferior del receptáculo 13 se compone de una segunda cinta transportadora considerablemente inclinada 14 (en un ángulo de unos 40º en el ejemplo ilustrado) y provisto de tramos transversos 15, preferiblemente igualmente espaciados a lo largo de la dirección longitudinal de la cinta. De acuerdo con una realización de la invención, los ramos 15 se orientan perpendiculares a la dirección de movimiento de la cinta 14.
La cinta transportadora inclinada 14 es ventajosamente una cinta de tela recubierta de caucho y, de acuerdo con una realización de la invención, los tramos consecutivos se desplazan transversalmente uno con respecto al otro y tienen largos diferentes de forma que cada uno es capaz de retener de modo constante y coger sólo un envase cada vez. Para este propósito, cada tramo se extiende preferiblemente por una fracción de la anchura transversal de la cinta 14, y se sitúa en uno de los dos lados de la cinta o centralmente, pero no se extiende por toda la anchura 55 transversal. De este modo, los envases que no están establemente sujetos en un tramo se deslizan hacia la parte inferior del receptáculo y permanecen allí hasta que son interceptados por un tramo que pasa por donde está situado el envase y lo recoge, llevándolo hasta la parte superior de la cinta. Los envases, alcanzan así la parte superior de la cinta individualmente, uno cada vez.
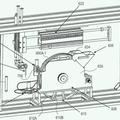
En la parte superior de la cinta transportadora con tramos se proporciona al menos otra fotocélula adicional (no ilustrada) que, bloqueada por el envase que pasa, hace que la cinta transportadora con tramos se detenga temporalmente como para retrasar la llegada de otros envases llevador por tramos siguientes. La señal generada por tal fotocélula pone en marcha simultáneamente, para un número predeterminado de segundos, una tercera cinta transportadora horizontal 17, a la que se transfiere el envase P. La tercera cinta lleva el envase para apoyarse 65 contra el lado vertical 18 de una barra rectilínea 19 que se extiende horizontalmente de acuerdo con una dirección sustancialmente perpendicular a la tercera cinta 17. El movimiento continuo de esta cinta obliga al envase a situarse con una de sus seis caras contra el lado vertical 18 de la barra 19, y en consecuencia en un plano vertical fijo predeterminado.
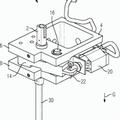
La barra fija 19 se extiende más allá de la tercera cinta horizontal, a lo largo de un lado de una placa transparente 20
dispuesta adyacente y a nivel con la parte superior horizontal de la cinta 17, en una dirección definida aquí “longitudinal”. Esta dirección es perpendicular a la dirección de avance de la tercera cinta 17. Adyacente a la placa transparente 20, en el otro lado de la cinta 17, hay una mesa horizontal 21, giratoria alrededor de un eje vertical. Por su lado, en la dirección longitudinal, se proporciona un plano 22 elevado sobre un eje horizontal transversal; el plano elevado 22 se articula a un banco horizontal fijo 23, y se asocia con un actuador neumático 24 capaz de inclinar el plano 22 para llevarlo de una posición horizontal (ilustrada con una línea continua) , a nivel con la mesa giratoria 21 y el banco 23, a una posición inclinada hacia arriba (línea discontinua 22) , como se explica aquí más adelante.
Una guía rectilínea (ilustrada sólo parcialmente en aras de la claridad) , que se extiende paralela a la barra longitudinal 19, se indica con el número de referencia 25. La guía 25 se extiende por encima de la cinta 17, la placa 15 transparente 20, la mesa giratoria 21, el plano inclinado 22, el banco 23, hasta una cinta transportadora final 37. A lo largo de la guía 25, una unidad de empuje corre comprendiendo esencialmente un trineo 26 y una barra transversal
29. El trineo 26 se acciona longitudinalmente por un motor eléctrico 27 a través de una cinta dentada 28. El motor 27 se asocia con un codificador (no ilustrado) para controlar con precisión la posición longitudinal del trineo. El trineo sostiene la barra móvil 29, que sustancialmente se extiende transversalmente por todo el ancho de la cinta 17 y las superficies de los elementos planos 20-23. Igual que ser trasladados juntos longitudinalmente con el trineo 26, la barra 29 también se puede subir y bajar junto con un par de ejes verticales 20 sostenidos por el trineo 26. Los movimientos de deslizamiento verticales de la barra 29 están causados por un pistón neumático 31, también llevados por el trineo 26 y cerca de los ejes 30.
La cinta transportadora final 37 transfiere horizontalmente los envases P, orientados previamente de un modo adecuado, contra una barra de parada 38 que define la estación de salida final desde donde se cogen los envases individuales por el robot de manipulación (no ilustrado) .
La barra móvil 29 se utiliza para empujar el envase hacia delante (pero también hacia atrás como se describe más tarde) desde la cinta 17 a la cinta transportadora final 37. Antes de alcanzar el banco 23, el envase individual se entrega para que se permita ser identificado, leyendo el código de barras. Como se mencionó anteriormente, el envase se debe colocar entonces en el banco de salida 23 orientado de forma que la cara que tiene menor área esté orientada verticalmente y de frente o direccionada longitudinalmente hacia el robot de manipulación que lo coge. Para llevar a cabo estas operaciones, el aparato debe ser capaz de escanear las seis caras del envase con forma paralelepípeda, ya que el código de barras está situado sólo en una de ellas. Para tener el envase orientado en la forma deseada, el aparato debe poder girar y, si es necesario, inclinar el envase de un modo adecuado. Para hacer esto, el aparato debe detectar las dimensiones del envase, para “saber”... [Seguir leyendo]
Reivindicaciones:
1. Un aparato para clasificar automáticamente productos farmacéuticos envasados, comprendiendo el aparato:
- un conjunto de medios de manipulación (11, 14, 17, 21, 22, 23, 25, 37) para coger envases farmacéuticos (P) de un receptáculo de entrada (13) donde están dispuestos aleatoriamente diferentes tipos de envases y transferir los envases a lo largo de un camino dado hasta una estación de salida final donde los envases (P) deben ser colocados individualmente y orientados de un modo predeterminado, y
- una pluralidad de lectores de códigos de barras (34) situados a lo largo de dicho camino, para identificar los productos farmacéuticos;
por lo cual el aparato comprende una estación de orientación de envase que incluye una cinta transportadora horizontal (17) asociada con una superficie de apoyo (18) fija y rectilínea; caracterizado porque la superficie de apoyo (18) se extiende en una dirección sustancialmente perpendicular a la dirección de avance de la cinta transportadora horizontal (17) , por lo cual el movimiento de la cinta horizontal (17) hace que una cara de cada envase (P) se apoye contra la superficie de apoyo fija (18) .
2. Un aparato de acuerdo con la reivindicación 1, caracterizado porque una cinta transportadora inclinada (14) está provista entre el receptáculo de entrada y la estación de orientación, teniendo la cinta transportadora (14) tramos (15) perpendiculares a la dirección de avance de la cinta transportadora inclinada (14) .
3. Un aparato de acuerdo con la reivindicación 2, caracterizado porque:
- los tramos (15) se extienden sólo a lo largo de una fracción de la anchura transversal de la cinta transportadora inclinada (14) , por lo cual cada tramo es capaz de retener de manera constante y transferir sólo un envase (P) cada vez, y porque
- dos tramos consecutivos están transversalmente desplazados uno respecto al otro.
4. Un aparato de acuerdo con la reivindicación 3, caracterizado porque dos tramos consecutivos (15) tienen distintos tamaños transversales.
5. Un aparato de acuerdo con una cualquiera de las reivindicaciones 2 a 4, caracterizado porque la cinta
transportadora (14) con los tramos (15) incluye una cinta de tela recubierta de caucho inclinada a un ángulo de aproximadamente 40º con la horizontal.
6. Un aparato de acuerdo con la reivindicación 1, caracterizado porque la superficie de apoyo (18) está provista por un lado vertical de una barra rectilínea fija (19) que extiende más allá de la cinta transportadora horizontal (17) , a lo largo de un lado de una placa transparente (20) , colocada adyacente y a nivel con la cinta transportadora (17) , e inmediatamente aguas abajo de la misma.
7. Un aparato de acuerdo con la reivindicación 1 ó 6, caracterizado porque un primer dispositivo sonar (16) para
detectar los tamaños transversales de los envases (P) está orientado hacia la superficie de apoyo vertical (18) . 45
8. Un aparato de acuerdo con las reivindicaciones 6 y 7, caracterizado porque el primer dispositivo sonar (16) está orientado hacia una parte de la superficie de apoyo vertical (18) situada en la placa transparente (20) .
9. Un aparato de acuerdo con la reivindicación 6, caracterizado porque al menos un lector láser (33) para leer códigos de barras está situado debajo de la placa transparente (20) .
10. Un aparato de acuerdo con la reivindicación 6, caracterizado porque una mesa horizontal (21) giratoria sobre un eje vertical está situada inmediatamente aguas abajo de la placa transparente (20) .
11. Un aparato de acuerdo con la reivindicación 10, caracterizado porque al menos un lector láser (34) para leer códigos de barras está situado junto a la mesa giratoria (21) .
12. Un aparato de acuerdo con la reivindicación 10, caracterizado porque hay un plano (22) montado aguas abajo de la mesa giratoria (21) que bascula sobre un eje horizontal transversal y articulado a un banco horizontal fijo (23) , estando asociado el plano inclinado con un actuador (24) capaz de inclinar el plano (22) entre una posición horizontal, a nivel con la mesa giratoria (21) , y el banco (23) , y una posición inclinada hacia arriba (22´) .
13. Un aparato de acuerdo con una o más de las reivindicaciones anteriores, que comprende además una cinta transportadora final horizontal (37) , que se mueve transversalmente con respecto a la dirección en la que se
extiende la superficie de apoyo fija (18) , estando asociada la cinta transportadora final con una superficie de parada fija (38) que se extiende en una dirección sustancialmente perpendicular a la dirección de avance de la cinta transportadora final (37) , por lo cual el movimiento de la cinta transportadora final (37) lleva a una cara de cada envase (P) a apoyarse contra la superficie de parada (38) en una posición final de donde el envase puede ser cogido.
14. Un aparato de acuerdo con la reivindicación 13, que incluye además una unidad de empuje para empujar horizontalmente los envases en direcciones dadas, paralelas a la que se extiende la superficie de apoyo fija (18) , comprendiendo la unidad de empuje:
- una guía de apoyo rectilínea (25) que se extiende, paralela a dichas direcciones dadas, a lo largo de un lado de la
cinta transportadora (17) , la placa transparente (20) , la mesa giratoria (21) , el plano inclinado (22) , el banco fijo (23) , hasta la cinta transportadora final (37) ;
- un trineo (28) impulsado para deslizarse a lo largo de la guía (25) ;
- un actuador (31) , llevado por el trineo (26) , para mover verticalmente el miembro transversal (29) .
- un miembro rectilíneo, transversalmente extendido (29) , trasladable longitudinalmente junto con el trineo (26) ;
Patentes similares o relacionadas:
DISPOSITIVO ORIENTADOR DE ENVASES Y MÁQUINA POSICIONADORA QUE LO PORTA, del 7 de Noviembre de 2019, de TRAKTECH CONTRUCCIONS MECANIQUES, S.L: Dispositivo posicionador de envases y máquina posicionadora que lo porta. Es utilizable con envase con cuello y boca. Comprende un embudo cuyos bordes están formados […]
Aparato de transporte con correa de vacío, del 24 de Julio de 2019, de QUALYSENSE AG: Un aparato para transportar partículas , incluyendo el aparato: una correa transportadora sinfín que tiene una pluralidad de […]
Dispositivo para separar objetos de ensayo, del 17 de Julio de 2019, de KRAEMER, THILO: Dispositivo para separar objetos de ensayo que comprende al menos un primer disco giratorio interno y un segundo disco giratorio externo , en […]
Cuba vibratoria para el suministro continuo de pequeñas piezas, del 27 de Marzo de 2019, de INTEC INDUSTRIAS TECNICAS S.L.: Cuba vibratoria para el suministro continuo de pequeñas piezas almacenadas sin orden en dicha cuba , dicha cuba presentando una pared cónica y un fondo […]
MÁQUINA Y PROCEDIMIENTO PARA POSICIONAR OBJETOS, del 22 de Marzo de 2019, de MULET VALLES,TOMAS: Máquina y procedimiento para posicionar objetos. Dicha máquina comprende una tolva de carga formada por un cuerpo envolvente estático, delimitado por una base de […]
Procedimiento y dispositivo para la alimentación de piezas de moldeo por inyección, del 20 de Febrero de 2019, de HEKUMA GMBH: Procedimiento para la alineación de elementos de filtro (F) destinados para la alimentación de piezas de moldeo por inyección, en particular de puntas de pipeta (P), […]
 Dispositivo para la separación de objetos con forma esférica o cilíndrica, del 31 de Octubre de 2018, de SIEMENS HEALTHCARE DIAGNOSTICS PRODUCTS GMBH: Dispositivo para la separación de objetos en forma de varilla o de esfera, que comprende una palanca provista con una perforación , donde la perforación […]
Dispositivo para la separación de objetos con forma esférica o cilíndrica, del 31 de Octubre de 2018, de SIEMENS HEALTHCARE DIAGNOSTICS PRODUCTS GMBH: Dispositivo para la separación de objetos en forma de varilla o de esfera, que comprende una palanca provista con una perforación , donde la perforación […]
 Sistema analítico con transporte de capilar, del 5 de Octubre de 2018, de BECKMAN COULTER, INC.: Sistema analítico que comprende:
una unidad de dispensador de capilares que comprende un depósito de almacenamiento configurado para almacenar una pluralidad […]
Sistema analítico con transporte de capilar, del 5 de Octubre de 2018, de BECKMAN COULTER, INC.: Sistema analítico que comprende:
una unidad de dispensador de capilares que comprende un depósito de almacenamiento configurado para almacenar una pluralidad […]