Accionador portátil lineal y procedimiento de limitación de la fuerza máxima de dicho accionador.
Accionador portátil lineal que comprende un motor (2) eléctrico que hace girar un tornillo (3) mediante un reductor (4),
siendo dicho motor (2) controlado por un módulo (5) electrónico que comprende medios (12) de adquisición de la intensidad instantánea de la corriente de alimentación del motor, caracterizado por el hecho de que el módulo (5) electrónico comprende además medios (13) de cálculo de la derivada con respecto al tiempo de la intensidad de la corriente de alimentación, conectados a unos medios (14) de comparación de esta derivada con un primer valor predeterminado (S1), siendo dichos medios (14) de comparación capaces de controlar medios de interrupción (15) de la corriente de alimentación si esta derivada es superior al primer valor predeterminado (S1), por el hecho de que el tornillo (3) comprende en uno de sus extremos un eje de anti-rotación (80) provisto en su extremo de un imán (83), y por el hecho de que la herramienta portátil comprende uno o varios sensores de efecto Hall (7, 8) capaces de detectar el paso del imán (83) y posicionados de manera que el paso del imán (83) indica que el tornillo (3) está en fin de carrera.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2005/000608.
Solicitante: VIRAX.
Nacionalidad solicitante: Francia.
Dirección: 39-41 QUAI DE LA MARNE 51200 EPERNAY FRANCIA.
Inventor/es: BERNIER, FREDERIC, AUDINET,JEAN-PIERRE, FAUCHER,CHRISTOPHE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65B27/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 27/00 Atado en paquetes de objetos especiales que presentan problemas particulares, con ayuda de fleje, alambre o bandas o cintas estrechas; Embalado o enfardado de materiales fibrosos, p. ej. turba, no previstos en otro lugar. › Atado de rollos de alambre o de objetos anulares análogos.
- H02H7/08 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02H CIRCUITOS DE PROTECCION DE SEGURIDAD (indicación o señalización de condiciones de trabajo indeseables G01R, p. ej. G01R 31/00, G08B; localización de defectos a lo largo de las líneas G01R 31/08; dispositivos de protección H01H). › H02H 7/00 Circuitos de protección de seguridad especialmente adaptados para máquinas o aparatos eléctricos de tipos especiales o para la protección seccional de sistemas de cables o líneas, y efectuando una conmutación automática en el caso de un cambio indeseable de las condiciones normales de trabajo (asociación estructural de órganos de protección con máquinas o aparatos específicos y su protección sin desconexión automática, ver la subclase correspondiente a tales máquinas o aparatos). › para motores dinamoeléctricos.
- H02K11/00 H02 […] › H02K MAQUINAS DINAMOELECTRICAS (relés dinamoeléctricos H01H 53/00; transformación de una potencia de entrada en DC o AC en una potencia de salida de choque H02M 9/00). › Asociación estructural de máquinas dinamoeléctricas con componentes eléctricos o con dispositivos de blindaje, monitarización o protección (carcasas, envolturas o soportes H02K 5/00).
- H02K7/06 H02K […] › H02K 7/00 Dispositivos para manipular energía mecánica estructuralmente asociados con con máquinas dinamo-eléctricas, p. ej. asociación estructural con un motores mecánico de arrastre o máquinas dinamoeléctrica auxiliares. › Medios para transformar un movimiento reciproco en movimiento circular o viceversa.
PDF original: ES-2429165_T3.pdf
Fragmento de la descripción:
Accionador portátil lineal y procedimiento de limitación de la fuerza máxima de dicho accionador
La presente invención se refiere a un accionador portátil lineal, un procedimiento de control de un motor eléctrico de un tal accionador para limitar la fuerza máxima generada por este y la utilización de este en un extractor de piezas mecánicas o en una herramienta para el trabajo del tubo. También se refiere a una herramienta portátil electromecánica de trabajo de tubos que comprende un tal accionador.
Son conocidos accionadores capaces de ejercer fuerzas a partir de un motor eléctrico de corriente continua, ver por ejemplo el documento US 2002/0074866.
Estos accionadores están conectados a unas herramientas especializadas.
Un ejemplo de talas herramientas es el extractor de piezas mecánicas, en especial para rodamientos de bolas. Otro ejemplo se refiere a las herramientas de trabajo del tubo, en especial para la expansión de este.
Sin embargo, estos accionadores están a menudo limitados a la fuerza máxima que son capaces de producir.
Efectivamente, estos accionadores se encuentran enfrentados a dos tipos de situación de trabajo.
En el primer tipo de situación, la herramienta está en funcionamiento normal. El material sobre el cual se aplica esta herramienta presenta por lo tanto una resistencia que hace que la fuerza a suministrar por el motor sea progresiva hasta un determinado valor máximo de trabajo que corresponde a la fuerza útil máxima sobre carrera en carga del accionador.
En el segundo tipo de situación, la herramienta se pone en funcionamiento en vacío. Se entiende por funcionamiento en vacío, una situación en la cual una herramienta está conectada al accionador pero esta herramienta no se aplica a ningún material o pieza. Como no hay ningún material presente para asegurar una resistencia al movimiento de la herramienta, la fuerza ejercido por el accionador es casi nula hasta el momento en que la herramienta llega al final de carrera (por ejemplo, porque los sectores de expansión del tubo están al final de carrera) . Al bloquearse la herramienta, genera una fuerza instantánea extremadamente elevada sobre el accionador.
El Solicitante ha constatado de este modo que la fuerza producida en la segunda situación podía ser superior al 50% de la fuerza útil máxima.
Esto tiene como inconveniente obligar a dimensionar mecánicamente el accionador para la fuerza máxima en vacío y no para la fuerza máxima útil lo cual, aparte del aumento de los costes, aumenta también el peso y la dimensión del accionador y por lo tanto lo hace menos portátil.
Además, ello disminuye la fiabilidad del accionador deteriorando el motor y la mecánica por aumento brusco de la intensidad y de la fuerza.
El objetivo de la invención es dar remedio a estos inconvenientes.
El objeto de la invención es un accionador portátil lineal según las características de la reivindicación 1.
Otro objeto de la invención es un procedimiento de control de un motor eléctrico de un accionador portátil lineal para limitar la fuerza máxima generada por este según las características de la reivindicación 8.
Otro objeto de la invención es una herramienta portátil electromecánica de trabajo del tubo según las características de la reivindicación 13.
Ventajosamente, esta herramienta es una máquina polivalente para el trabajo del tubo, portátil y electromecánica.
Unos modos particulares de realización del accionador portátil lineal se describen en las reivindicaciones 2 a 7. [0018] Unos modos particulares de realización del procedimiento de control se describen en las reivindicaciones 9 a
11. [0019] Unos modos particulares de realización de la herramienta portátil se describen en las reivindicaciones 14 a
20.
La invención también tiene por objeto la utilización de este accionador en un extractor de piezas mecánicas, en especial para rodamiento, o en una herramienta para trabajar el tubo, en especial la expansión de este.
La invención se comprenderá mejor a la luz de la descripción siguiente, determinada únicamente a título de ejemplo, y haciendo referencia a los dibujos adjuntos en los cuales:
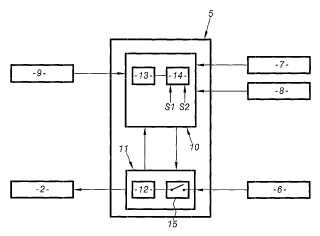
- la figura 1 es el esquema de un accionador; -la figura 2 es el esquema sinóptico del módulo electrónico del accionador de la figura 1; -la figura 3 es la curva de fuerza en función del tiempo de un accionador del estado de la técnica; -la figura 4 es la curva de fuerza del accionador de la figura 1; -la figura 5 es el ordinograma de control del módulo electrónico del accionador de la figura 1; -la figura 6 es una vista esquemática en despiece de lado de una herramienta portátil según la invención; -la figura 7 es una vista en sección de los medios de fijación de una cabeza de trabajo; -la figura 8 es una vista en sección de los medios de fijación de una cabeza de trabajo según la línea de corte II-II
de la figura 7; -la figura 9 es una vista en perspectiva de los medios de fijación de una cabeza de trabajo; -la figura 10 es una vista en perspectiva de los sensores de fin de carrera; -la figura 11 es una vista en sección axial de una cabeza de trabajo para la expansión radial de un tubo; -la figura 12 es una vista en sección axial de una cabeza de trabajo para el prensado radial de un tubo; -la figura 13 es una vista en sección longitudinal de una cabeza de trabajo para el prensado axial en línea; y -la figura 14 es una vista en sección longitudinal de otra cabeza de trabajo para el prensado axial ortogonal. [0022] Un accionador portátil lineal 1, figura 1, comprende un motor eléctrico 2 que hace girar un tornillo 3 mediante
un reductor 4, de estructura clásica, por ejemplo de tipo epi-cicloidal. El tornillo 3 es preferentemente un tornillo de bolas que, como es bien conocido, permite transformar el movimiento de rotación del motor 2 en un movimiento de translación del tornillo a lo largo del eje de este. Como el accionador portátil lineal 1 debe ser capaz de resistir una fuerza elevada, el tornillo de bolas, minimizando los rozamientos mecánicos, está especialmente bien adaptado.
El motor eléctrico 2 está controlado por un módulo electrónico 5 que controla en particular la alimentación
eléctrica del motor suministrada por una batería 6. [0024] Unos sensores 7, 8 de fin de carrera están también conectados al módulo electrónico 5 con el fin de controlar la amplitud de desplazamiento del tornillo 3. Estos sensores 7, 8 son, por ejemplo, sensores de efecto Hall.
De manera clásica, el accionador también tiene un interruptor manual 9, en forma de un palanca, para permitir al usuario controlar los movimientos del accionador. Este interruptor manual 9 también está conectado al módulo electrónico 5.
El módulo electrónico 5, figura 2, comprende clásicamente un módulo de control 10 que comprende un microcontrolador conectado a un módulo de potencia 11 que garantiza la gestión de la alimentación eléctrica del motor 2 y que por lo tanto está interpuesto entre la batería 6 y el motor 2.
El interruptor manual 9 y los sensores 7, 8 de fin de carrera están conectados al módulo de control 10. [0028] El módulo de potencia 11 comprende medios 12 de adquisición de la intensidad instantánea de la corriente de alimentación del motor 2. Esta adquisición se hace de manera clásica por ejemplo mediante utilización de un
convertidor intensidad-tensión conectado a un convertidor analógico-numérico o mediante la utilización de un mosfet. [0029] Los medios 12 de adquisición suministran por lo tanto al módulo de control 10 un valor numérico
representativo de la intensidad instantánea de la corriente de alimentación del motor 2.
El módulo de control 10 comprende también unos medios 13 de cálculo de la derivada con respecto al tiempo de la intensidad de la corriente de alimentación. [0031] Comprende también unos medios 14 de comparación de esta derivada con un primer valor predeterminado
S1 y de la intensidad de la corriente de alimentación con un segundo valor predeterminado S2, para activar un interruptor 15 de corte de la alimentación del motor 2 si esta derivada es superior a este primer valor predeterminado S1 o si la intensidad es superior a este segundo valor predeterminado S2.
El funcionamiento del accionador se va a explicar a continuación en relación con la figura 3.
Efectivamente, un examen de la figura 3 que representa la fuerza en función del tiempo cuando el accionador está en carga, curva 20, y cuando el accionador funciona en vacío, curva 21, muestra que, en el caso... [Seguir leyendo]
Reivindicaciones:
1. Accionador portátil lineal que comprende un motor (2) eléctrico que hace girar un tornillo (3) mediante un reductor (4) , siendo dicho motor (2) controlado por un módulo (5) electrónico que comprende medios (12) de adquisición de la intensidad instantánea de la corriente de alimentación del motor, caracterizado por el hecho de que el módulo (5) electrónico comprende además medios (13) de cálculo de la derivada con respecto al tiempo de la intensidad de la corriente de alimentación, conectados a unos medios (14) de comparación de esta derivada con un primer valor predeterminado (S1) , siendo dichos medios (14) de comparación capaces de controlar medios de interrupción (15) de la corriente de alimentación si esta derivada es superior al primer valor predeterminado (S1) , por el hecho de que el tornillo (3) comprende en uno de sus extremos un eje de anti-rotación (80) provisto en su extremo de un imán (83) , y por el hecho de que la herramienta portátil comprende uno o varios sensores de efecto Hall (7, 8) capaces de detectar el paso del imán (83) y posicionados de manera que el paso del imán (83) indica que el tornillo (3) está en fin de carrera.
2. Accionador portátil lineal según la reivindicación 1, caracterizado por el hecho de que los medios (12) de adquisición de la intensidad comprenden unos medios de muestreo a intervalos regulares de esta conectados a unos medios de almacenamiento de estas muestras para una ventana de tiempo deslizante de una duración predeterminada y los medios (13) de cálculo de la derivada comprenden unos medios de cálculo de la diferencia entre los valores de la intensidad para la muestra más reciente y la muestra más antigua de la ventana y los medios
(14) de comparación comparan esta diferencia con el primer valor predeterminado (S1) .
3. Accionador portátil lineal según la reivindicación 1 ó 2, caracterizado por el hecho de que el módulo (5) electrónico comprende además unos segundos medios de comparación de la intensidad de la corriente de alimentación con un segundo valor predeterminado (S2) , capaces de controlar los medios (15) de interrupción de la corriente de alimentación si esta intensidad es superior al segundo valor predeterminado (S2) .
4. Accionador portátil lineal según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que el módulo (5) electrónico comprende además unos medios de temporización configurados de modo que los medios de interrupción solamente son activables después de un retraso predeterminado tras el arranque del accionador.
5. Accionador portátil lineal según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que comprende además unos sensores (7, 8) de fin de carrera del tornillo conectados al módulo (5) electrónico de tal manera que los medios (15) de interrupción de la alimentación se activan cuando dichos sensores (7, 8) detectan que el tornillo (3) está en fin de carrera.
6. Accionador portátil lineal según cualquiera de las reivindicaciones 1 a 5, caracterizado por el hecho de que los sensores de efecto Hall (7, 8) están posicionados en una tarjeta electrónica (82) que comprende varios emplazamientos de posicionamiento de estos sensores adaptados a diferentes carreras de desplazamiento del tornillo (3) .
7. Accionador portátil lineal según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que el tornillo (3) es un tornillo de bolas y el motor eléctrico (2) se alimenta con una batería.
8. Procedimiento de control de un motor (2) eléctrico de un accionador portátil lineal que hace girar un tornillo (3) mediante un reductor (4) , estando dicho motor (2) controlado por un módulo (5) electrónico que comprende medios
(12) de adquisición de la intensidad instantánea de la corriente de alimentación del motor, comprendiendo el tornillo
(3) en uno de sus extremos un eje de anti-rotación (80) provisto en su extremo de un imán (83) , y comprendiendo el accionador portátil uno o varios sensores de efecto Hall (7, 8) capaces de detectar el paso del imán (83) y posicionados de manera que el paso del imán (83) indica que el tornillo (3) está en fin de carrera, para limitar la fuerza máxima generada por este, estando el procedimiento caracterizado por el hecho de que comprende las etapas siguientes:
- adquisición de un valor de la corriente de alimentación del motor eléctrico a intervalos regulares;
- cálculo de la derivada de la función de la corriente con respecto al tiempo; y
- si la derivada es superior a un primer valor predeterminado (S1) , interrupción de la alimentación eléctrica del motor.
9. Procedimiento según la reivindicación 8, caracterizado por el hecho de que teniendo lugar la adquisición del valor de la corriente a intervalos regulares, el cálculo de la derivada se aproxima mediante el cálculo de la diferencia entre el valor de la corriente entre la adquisición más reciente y la adquisición más antigua de una ventana de tiempo deslizante.
10. Procedimiento según cualquiera de las reivindicaciones 8 ó 9, caracterizado por el hecho de que comprende además las etapas de comparación del valor de la corriente de alimentación con un segundo valor predeterminado (S2) , luego de interrupción de la corriente de alimentación si este valor de la corriente es superior al segundo valor predeterminado (S2) .
11. Procedimiento según cualquiera de las reivindicaciones 8, 9 ó 10, caracterizado por el hecho de que las etapas de cálculo de la derivada y de comparación solamente se activan tras un tiempo predeterminado después del arranque del motor.
12. Utilización de un accionador según cualquiera de las reivindicaciones 1 a 7 en un extractor de piezas mecánicas, en especial para rodamiento, o en una herramienta para el trabajo del tubo, en especial la expansión de este.
13. Herramienta portátil electro-mecánica de trabajo de tubos que comprende un accionador portátil lineal (1) , según cualquiera de las reivindicaciones 1 a 7 y unos primeros medios (62) de fijación, comprendiendo dicha herramienta además una primera cabeza de trabajo (60) adaptada para realizar en un tubo una primera tarea y al menos una segunda cabeza de trabajo adaptada para realizar en un tubo una segunda tarea diferente de la primera tarea, comprendiendo cada cabeza de trabajo (60) unos segundos medios (63) de fijación, y estando los primeros y segundos medios (62, 63) de fijación adaptados para cooperar conjuntamente para fijar cada cabeza de trabajo (60) al accionador portátil lineal de tal manera que este pueda generar un movimiento de translación de una parte predeterminada de la cabeza de trabajo fijada al accionador portátil lineal (1) .
14. Herramienta portátil según la reivindicación 13, caracterizada por el hecho de que las cabezas de trabajo (60) están adaptadas para realizar cada una al menos una de las tareas siguientes:
- expansión radial de un tubo,
- expansión axial de un tubo,
- recorte de un tubo,
- prensado axial en línea,
- prensado axial ortogonal,
- prensado radial de un tubo.
15. Herramienta portátil según la reivindicación 14, caracterizada por el hecho de que cada cabeza está adaptada para realizar solamente una de las tareas.
16. Herramienta portátil según la reivindicación 14, caracterizada por el hecho de que una cabeza de trabajo está adaptada para realizar un prensado axial de un tubo en un movimiento ortogonal al movimiento de translación generado por el accionador portátil lineal (1) .
17. Herramienta portátil según la reivindicación 16, caracterizada por el hecho de que la cabeza de trabajo comprende un soporte fijo (140) en forma de T, que comprende en su pie los segundos medios (63) de fijación y en su cuerpo un mandrilado capaz de permitir el deslizamiento del tornillo (3) y que define un plano de desplazamiento de medios móviles (148, 152, 153, 156, 157, 160, 161, 162, 163) capaces de transformar un movimiento de translación generado por el tornillo (3) a lo largo del cuerpo del soporte fijo (140) en movimientos de rotación de dos brazos porta-mandíbulas (160, 161) alrededor de dos ejes (144, 145) perpendiculares al plano de desplazamiento, posicionados en los extremos de la cabeza de los medios de soporte fijo (140) , y medios (164, 165, 166, 167) para mantener las mandíbulas (162, 163) paralelas a sí mismas en el transcurso de los movimientos de estos brazos (160, 161) .
18. Herramienta portátil según la reivindicación 17, caracterizada por el hecho de que los medios móviles son simétricos con respecto al eje (X-X) de desplazamiento del tornillo (3) y comprenden unos primeros elementos (141, 148, 149) móviles en translación a lo largo del cuerpo del soporte fijo (140) y solidarios del tornillo (3) , conectados mediante unos primeros ejes de rotación (150, 151) a unos segundos elementos (152, 153) , estando estos conectados mediante unos segundos ejes de rotación (154, 155) a unos terceros elementos (156, 157) montados pivotantes alrededor de los ejes de rotación (144, 145) de la cabeza del soporte, y por el hecho de que los brazos porta-mandíbulas (160, 161) están articulados alrededor de terceros ejes de rotación (158, 159) de los terceros elementos (156, 157) , comprendiendo estos brazos (160, 161) unas rampas de leva (164, 165) que cooperan con unas contra-levas (166, 167) soportadas por dichos segundos elementos (152, 153) para mantener las mandíbulas (162, 163) paralelas a sí mismas en el transcurso de los movimientos de estos brazos (160, 161) .
19. Herramienta portátil según cualquiera de las reivindicaciones 13 a 18, caracterizada por el hecho de que los primeros medios (62) de fijación comprenden un pestillo deslizante (98) según un eje perpendicular al movimiento de translación del tornillo (3) , estando dicho pestillo adaptado para insertarse en una garganta anular (91) de los segundos medios (63) de fijación de tal manera que pueda fijar cada cabeza de trabajo (60) al accionador portátil lineal (1) permitiendo a la vez una rotación libre de la cabeza de trabajo (60) alrededor del tornillo (3) .
20. Herramienta portátil según la reivindicación 19, caracterizada por el hecho de que el pestillo deslizante (98) comprende un anillo solicitado hacia una posición descentrada para insertarse en la garganta anular (91) .
Patentes similares o relacionadas:
Accionamiento electromotriz de un mueble, del 6 de Mayo de 2020, de DewertOkin GmbH (100.0%): Accionamiento electromotriz de un mueble para un mueble reclinable o un mueble de asiento con un riel de guía y una unidad de eje de salida que se mueve […]
Actuador lineal y dispositivo de control de oscilación para un vehículo ferroviario, del 18 de Marzo de 2020, de Moog Japan Ltd: Un actuador lineal que comprende: un rotor hueco que tiene un imán permanente fijado a una parte de su superficie periférica externa, y una […]
Dispositivo para aplicar una fuerza de presión a un elemento de fijación, del 26 de Febrero de 2020, de BALTEC MASCHINENBAU AG: Un dispositivo para actuar sobre un elemento de fijación con una fuerza aplicada, de modo que el elemento de fijación sufre deformación plástica […]
Bomba de ultra alta presión, del 6 de Noviembre de 2019, de Quantum Servo Pumping Technologies Pty Ltd: Una bomba de ultra alta presión acoplada a una máquina de corte por chorro de agua (W); comprendiendo la máquina de corte por chorro de agua un […]
ALTERNADOR LINEAL ALTERNATIVO, del 19 de Julio de 2019, de GUZMAN PORRAS, ANTONIO: Alternador lineal alternativo que comprende: una entrada de eje; un conversor del movimiento de giro del eje en movimiento lineal alternativo; una masa […]
Dispositivo de detección de tope posterior en un accionador lineal, del 6 de Mayo de 2019, de VIRAX: Accionador lineal que consta de medios de accionamiento de un equipo móvil entre una posición de reposo y una posición activa, y un módulo electrónico […]
Bomba de ultra alta presión con mecanismo de accionamiento de rotación alternante y desplazamiento lineal, del 20 de Febrero de 2019, de Quantum Servo Pumping Technologies Pty Ltd: Una bomba de ultra alta presión, que comprende un servomotor ; un árbol de rotor hueco ; medios de accionamiento ; dos pistones (50, […]
Máquina-herramienta, del 8 de Octubre de 2018, de AMVALOR: Máquina de mecanizado que comprende un bastidor en el cual un árbol de accionamiento de una herramienta está montado para articular alrededor de un […]