Un cabezal de recogida provisto de dispositivos de recogida, dispuestos en paralelo y con separación variable.
Cabezal de recogida (1) que comprende:
- una estructura de soporte (10);
- una guía horizontal (16) retenida en una posición fija por dicha estructura de soporte (10);
- una pluralidad de dispositivos de recogida (26) capaces de funcionar para agarrar y liberar respectivos productos(4), dispuestos en paralelo y acoplados de manera deslizante a dicha guía horizontal (16);
- medios móviles (30) para mover dichos dispositivos de recogida (26) a lo largo de dicha guía horizontal (16) entreuna configuración comprimida y una configuración extendida, en la que dichos dispositivos de recogida (26) estánposicionados con separaciones diferentes; comprendiendo dichos medios móviles (30):(a) para cada dispositivo de recogida, una respectiva leva (31) y un respectivo elemento seguidor (32);estando retenidas las levas (31) por dicha estructura de soporte (10) y estando acoplados loselementos seguidores (32), respectivamente, a dichos dispositivos de recogida (26);
(b) al menos un accionador para desplazar las levas;
extendiéndose dichas levas (31) alrededor de un eje (35) paralelo a dicha guía horizontal (16) y activándose pormedio de dicho accionador para rotar alrededor de dicho eje (35);
caracterizado porque cada leva (31) está cerrada como un bucle continuo sobre 360º alrededor de dicho eje (35).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09177339.
Solicitante: OPM S.P.A.
Nacionalidad solicitante: Italia.
Dirección: STRADA STATALE 231, 8/A 12066 MONTICELLO D''ALBA ITALIA.
Inventor/es: Giacobbe,Fulvio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G47/91 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › que tienen pinzas neumáticas, p. ej. aspirantes.
PDF original: ES-2386856_T3.pdf
Fragmento de la descripción:
Un cabezal de recogida provisto de dispositivos de recogida, dispuestos en paralelo y con separación variable
La presente invención se refiere a un cabezal de recogida provisto de dispositivos de recogida, dispuestos en paralelo y con separación variable, de acuerdo con el preámbulo de la reivindicación 1.
Se conocen máquinas de transferencia para transferir productos de una estación de selección a una estación de almacenamiento, que comprenden un robot y una cabezal de recogida, que se mueve entre las dos estaciones por
medio del robot y comprende una serie de dispositivos de recogida, dispuestos en paralelo y que se activan para agarrar, retener y liberar los respectivos productos. En la estación de selección, los productos que se van a transferir están dispuestos en filas a una distancia constante y predeterminada, mientras que, normalmente, la estación de almacenamiento tiene una serie de recipientes, en los que se van a envasar los productos, a una distancia diferente de la de la estación de selección.
El cabezal de recogida comprende una guía horizontal en la que están acoplados, de manera deslizante, los dispositivos de recogida. La separación entre los dispositivos de recogida a lo largo de la guía se reduce cuando se transfiere de la estación de selección a la estación de almacenamiento, a fin de colocar los productos a la distancia que necesita la estación de almacenamiento.
A fin de mover los dispositivos de recogida unos hacia otros y en dirección opuesta a lo largo de la guía, se conocen soluciones en las que el cabezal de recogida comprende una placa plana que define una serie de levas o carriles, que están engranados por elementos seguidores retenidos por los dispositivos de recogida, respectivamente. El cabezal de recogida comprende además un accionador, que mueve la placa en una dirección ortogonal a la guía
sincrónicamente con el movimiento del robot, para hacer que los elementos seguidores se deslicen a lo largo de las levas y, por lo tanto, muevan los dispositivos de recogida a lo largo de la guía a velocidades predeterminadas y a posiciones predeterminadas.
Las soluciones conocidas que se han descrito anteriormente no son satisfactorias porque el movimiento alternativo
lineal que provoca el accionador desequilibra continuamente el centro de gravedad del cabezal de recogida y tiende a dar lugar a vibraciones no deseadas que se transfieren al robot durante la transferencia entre las estaciones de selección y de almacenamiento. Estos inconvenientes dan lugar a vibraciones y a faltas de precisión a la hora de controlar el posicionamiento del cabezal de recogida, por lo que se deberían compensar diseñando y/o dimensionando adecuadamente los brazos y motores del robot, con los consiguientes costes y dimensiones
adicionales.
En el documento US6068317A se describe un dispositivo de acuerdo con el preámbulo de la reivindicación 1. El dispositivo incluye una placa elevadora, que se puede mover en dirección ascendente y descendente a lo largo de una guía vertical, y un árbol de levas montado, de manera que puede rotar, en la placa elevadora. El árbol de levas
tiene una pluralidad de ranuras excéntricas formadas en una dirección radial en una superficie circunferencial exterior y rota por medio de un mecanismo de accionamiento. Una pluralidad de elementos de recogida se puede mover en una dirección horizontal a lo largo de una guía horizontal y tienen respectivos extremos superiores insertados en las ranuras excéntricas.
45 El objetivo de la presente invención es implementar un cabezal de recogida provisto de dispositivos de recogida, dispuestos en paralelo con separación variable, que permite solucionar los problemas que se han mencionado anteriormente de manera sencilla y económica.
De acuerdo con la presente invención, se proporciona un cabezal de recogida según se define en la reivindicación 1.
50 A continuación, se describirá la invención en relación con los dibujos adjuntos que ilustran una realización no limitante de la misma, en los que:
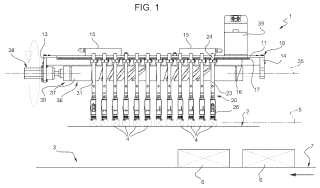
la figura 1 es una vista parcial de frente de una realización preferente del cabezal de recogida provisto de 55 dispositivos de recogida, dispuestos en paralelo y con separación variable, de acuerdo con la presente invención;
las figuras 2 y 3 son similares a la figura 1 y muestran el cabezal de recogida cuando se mueve hacia una posición de funcionamiento diferente; la figura 4 es una vista en perspectiva desde la parte inferior, con piezas en despiece ordenado, de un detalle del cabezal de recogida de la figura 1 y
la figura 5 es una vista en perspectiva de un componente del cabezal de recogida de la figura 1.
En la figura 1, el número (1) indica un cabezal de recogida, como una unidad, (se ilustra parcialmente) que se mueve por medio de un robot (no se muestra) para transferir productos (4) de una estación de selección (2) a una estación de almacenamiento (3) . Los productos (4) que se van a transferir están dispuestos en la estación (2) en una fila a lo largo de una dirección horizontal (5) , en posiciones fijas y a una distancia recíproca predeterminada y constante. Por
el contrario, la estación (3) aloja una serie de recipientes en los que se van a envasar los productos. Los recipientes
(6) están dispuestos en una fila sobre una cinta transportadora (7) , que es paralela a la dirección (5) y, en el ejemplo específico que se describe, se mueve con un movimiento continuo, preferentemente, a velocidad constante también durante el movimiento de transferencia del cabezal de recogida (1) hacia la estación (3) y cuando libera los productos (4) en los recipientes (6) .
El cabezal de recogida (1) comprende una estructura de soporte (10) que está fijada al extremo de un brazo del robot de un modo que no se muestra ni se describe en detalle. La estructura (10) comprende: una placa horizontal superior (11) alargada de manera paralela a la dirección (5) y dos pestañas verticales (13, 14) fijadas a los extremos axiales opuestos de la placa (11) .
La placa (11) retiene dos distribuidores neumáticos (15) y una guía (16) , que están dispuestos en posiciones fijas en las caras superior e inferior de la placa (11) , respectivamente.
En relación con la figura 4, la guía (16) está horizontal y es recta y se extiende de manera paralela a la dirección (5)
y la pestaña (14) está conformada de manera que define un entrante (19) delante de un extremo (17) de la guía (16) a fin de dejar el extremo (17) abierto para poder insertar los dispositivos de recogida (20) en la guía (16) y extraerlos de la misma.
La cantidad de dispositivos de recogida (20) es igual a la de productos (4) que se van a recoger cada vez, en
particular, están divididos en dos grupos de seis, también se denominan “dedos”, y comprenden respectivas barras verticales (23) y respectivos bloques de soporte (24) . Los bloques (24) están sujetos a los extremos superiores de las barras (23) y retienen respectivas deslizaderas (25) que están dispuestas en posiciones fijas en la cara superior de los bloques (24) y están acopladas de manera deslizante a la guía (16) .
Los dispositivos de recogida (20) comprenden además respectivos dispositivos de recogida (26) , que están acoplados en posiciones fijas a los extremos inferiores de las barras (23) y se pueden activar para agarrar, retener y liberar los respectivos productos (4) . En particular, los dispositivos de recogida (26) están definidos por sistemas de succión, por ejemplo, por pares de ventosas que, en uso, contactan con la cara superior de los productos (4) . Alternativamente, los dispositivos de recogida pueden estar definidos por un sistema de succión diferente o por
pinzas accionadas eléctrica o neumáticamente. En el ejemplo específico que se muestra en la figura 4, las ventosas
(26) están conectadas a conectores (28) de los distribuidores (15) por medio de respectivos tubos flexibles (29) . A su vez, los distribuidores (15) conectan las ventosas (26) a un sistema neumático (no se muestra) para generar vacío a fin de poder crear un vacío en el área por debajo de las ventosas (26) cuando es necesario recoger los productos (4) . Los productos (4) se liberan en la estación (3) controlando respectivas válvulas... [Seguir leyendo]
Reivindicaciones:
1. Cabezal de recogida (1) que comprende:
- una estructura de soporte (10) ;
- una guía horizontal (16) retenida en una posición fija por dicha estructura de soporte (10) ;
- una pluralidad de dispositivos de recogida (26) capaces de funcionar para agarrar y liberar respectivos productos 10 (4) , dispuestos en paralelo y acoplados de manera deslizante a dicha guía horizontal (16) ;
- medios móviles (30) para mover dichos dispositivos de recogida (26) a lo largo de dicha guía horizontal (16) entre una configuración comprimida y una configuración extendida, en la que dichos dispositivos de recogida (26) están posicionados con separaciones diferentes; comprendiendo dichos medios móviles (30) :
(a) para cada dispositivo de recogida, una respectiva leva (31) y un respectivo elemento seguidor (32) ; estando retenidas las levas (31) por dicha estructura de soporte (10) y estando acoplados los elementos seguidores (32) , respectivamente, a dichos dispositivos de recogida (26) ;
(b) al menos un accionador para desplazar las levas;
extendiéndose dichas levas (31) alrededor de un eje (35) paralelo a dicha guía horizontal (16) y activándose por medio de dicho accionador para rotar alrededor de dicho eje (35) ; caracterizado porque cada leva (31) está cerrada como un bucle continuo sobre 360º alrededor de dicho eje (35) .
2. Cabezal de recogida de acuerdo con la reivindicación 1, caracterizado porque dichas levas (31) están retenidas por un único árbol o por un único tambor (37) , que está acoplado de manera rotatoria a dicha estructura de soporte (10) alrededor de su propio eje (35) .
3. Cabezal de recogida de acuerdo con la reivindicación 1 o 2, caracterizado porque dichas levas (31) 30 comprenden:
- respectivas primeras partes (41) , que están conformadas a fin de aproximar dichos dispositivos de recogida (26) de la configuración extendida a la configuración comprimida y, a la vez, deslizar el conjunto de dichos dispositivos de recogida (26) axialmente en una dirección de movimiento paralela a dicho eje (35) y
- respectivas segundas partes, que están conformadas a fin de separar dichos dispositivos de recogida (26) de la configuración comprimida a la configuración extendida y, a la vez, deslizar el conjunto de dichos dispositivos de recogida (26) en la dirección opuesta.
4. Cabezal de recogida de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque dichos dispositivos de recogida (26) están conectados a los elementos seguidores por respectivas barras verticales (23) situadas delante de dichas levas (31) ; estando definidos dichos elementos seguidores (32) por rodillos móviles que rotan alrededor de respectivos ejes verticales y retenidos, de manera que sobresalen, en la parte inferior por respectivas placas (33) que están situadas encima de dichas levas (31) y que están fijas respecto a
45 dichas respectivas barras (23) .
Patentes similares o relacionadas:
Dispositivo y procedimiento para desembalar y alimentar envueltas de envase plegadas de manera plana y verticales, del 10 de Junio de 2020, de SIG TECHNOLOGY AG: Dispositivo para transferir envolturas de envase plegadas de manera plana y verticales a una unidad de procesamiento subsiguiente, en particular una máquina llenadora para […]
Ventosa de aspiración y procedimiento para asir rodajas elásticas, del 27 de Mayo de 2020, de DEUTSCHES INSTITUT FUR LEBENSMITTELTECHNIK E.V.: Ventosa de aspiración para el uso como dispositivo de separación de rodajas elásticas de una pila de rodajas, con una campana de aspiración […]
Estación automática para recoger artículos y procedimientos relacionados para usar, del 26 de Febrero de 2020, de CT PACK S.R.L.: Una estación automática para recoger artículos (A) que comprende: - un sistema de movimiento que comprende un transportador que define una superficie […]
Dispositivo para recoger artículos, del 15 de Enero de 2020, de CT PACK S.R.L.: Un dispositivo para recoger artículos , que comprende una unidad de soporte y una pluralidad de cabezales de agarre portados mediante la unidad de soporte , […]
Silenciador para pinza de succión, del 25 de Diciembre de 2019, de DEUTSCHES INSTITUT FUR LEBENSMITTELTECHNIK E.V.: Silenciador con una carcasa dotada de una entrada que puede unirse con el conducto de gas de escape de una pinza de succión y con […]
Ventosa con faldón separable, del 4 de Diciembre de 2019, de VTEC Co. Ltd: Ventosa con faldón separable que comprende: un cuerpo hueco (11, 31, 41 o 51) que tiene un conducto formado verticalmente a través de él, una protuberancia anular […]
Dispositivo de ventosas y transportador por aspiración con un dispositivo de ventosas de este tipo, del 9 de Octubre de 2019, de Putz, Stefan: Dispositivo de ventosas para un transportador por aspiración que comprende una ventosa para recoger un producto, en donde la ventosa define una cámara de aspiración […]
Dispositivo de transporte de piezas y método para transportar piezas, del 17 de Abril de 2019, de FAGOR ARRASATE, S. COOP: Dispositivo de transporte de piezas, en particular de piezas en forma de placa, que comprende un medio transportador para transportar […]