Un cabezal de recogida dotado de dispositivos de recogida dispuestos lado con lado y con un espaciado variable.
Cabezal de recogida (1) que comprende:
• una estructura de soporte (10);
• una guía horizontal (16) mantenida en una posición fija mediante dicha estructura de soporte (10);
• una pluralidad de dispositivos de recogida (26) accionables para agarrar y liberar productos (4) respectivos,dispuestos lado con lado y acoplados de un modo deslizante a dicha guía horizontal (16);
• medios de desplazamiento (30) para desplazar dichos dispositivos de recogida (26) a lo largo de dicha guíahorizontal (16) entre una configuración compacta y una configuración agrandada, en las cuales dichosdispositivos de recogida (26) se sitúan con espaciados diferentes; comprendiendo dichos medios dedesplazamiento (30):
para cada uno de dichos dispositivos de recogida, una leva (31) respectiva y un elemento de seguidor (32)respectivo; estando sostenidas las levas (31) por dicha estructura de soporte (10), y estando acopladoslos elementos de seguidor (32) respectivamente a dichos dispositivos de recogida (26);
al menos un actuador para desplazar las levas;
• un árbol o tambor (37), que sostiene dichas levas (31), se extiende a lo largo de un eje (35) paralelo a dichaguía horizontal (16), y es activado por dicho actuador (38) para girar alrededor de dicho eje (35); y
• medios de unión (42, 43) que conectan dicho árbol o tambor (37) a dicha estructura de soporte (10) de unmodo retirable;
caracterizado porque dichos medios de unión (42, 43) comprenden dos cuerpos de soporte (44, 58) que estánacoplados de modo giratorio a dicha estructura de soporte (10) alrededor de dicho eje (35); estando fijos losextremos axiales (40, 41) de dicho árbol o tambor (31) a dichos cuerpos de soporte (44, 58) de un modo retirable.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09177338.
Solicitante: OPM S.P.A.
Nacionalidad solicitante: Italia.
Dirección: STRADA STATALE 231, 8/A 12066 MONTICELLO D''ALBA ITALIA.
Inventor/es: Giacobbe,Fulvio, Gasverde,PierAngelo.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G47/91 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › que tienen pinzas neumáticas, p. ej. aspirantes.
PDF original: ES-2386754_T3.pdf
Fragmento de la descripción:
Un cabezal de recogida dotado de dispositivos de recogida dispuestos lado con lado y con un espaciado variable
Antecedentes de la invención
La presente invención se refiere a un cabezal de recogida dotado de dispositivos de recogida dispuestos lado con 5 lado y con un espaciado variable, de acuerdo con el preámbulo de la reivindicación 1 adjunta.
Son conocidas máquinas de transferencia para transferir productos de una estación de recogida a una estación de almacenaje, que comprenden un robot y un cabezal de recogida, que es desplazado por el robot entre las dos estaciones, y que comprende una serie de dispositivos de recogida dispuestos lado con lado y activados para agarrar, sostener y liberar los productos respectivos. En la estación de recogida, los productos que van a ser
transferidos se disponen en una hilera a una distancia predeterminada constante, mientras que la estación de almacenaje tiene normalmente una serie de recipientes en los cuales los productos tienen que ser empaquetados a una distancia diferente de la de la estación de recogida.
El cabezal de recogida comprende un carril horizontal, en el cual se acoplan los dispositivos de recogida de modo deslizante. El espaciado entre los dispositivos de recogida a lo largo del carril se reduce en la transferencia de la
estación de recogida a la estación de almacenaje, de modo que los productos se sitúen a la distancia requerida por la estación de almacenaje.
Con el fin de desplazar los dispositivos de recogida acercándolos y alejando los entre sí a lo largo del carril, se conocen soluciones en las cuales el cabezal de recogida comprende una placa plana que define una serie de levas o pistas, con las que se acoplan elementos de seguidor sostenidos por los dispositivos de recogida, respectivamente.
El cabezal de recogida comprende además una actuador, que desplaza la placa en una dirección perpendicular al carril, de modo síncrono con el movimiento del robot, para hacer que los elementos de seguidor deslicen a lo largo de las levas y desplacen por lo tanto los dispositivos de recogida a lo largo del carril a velocidades predeterminadas y a posiciones predeterminadas.
Las soluciones conocidas anteriormente descritas no son satisfactorias, ya que el centro de gravedad del cabezal de
recogida se desplaza debido al movimiento de la placa, con las consiguientes vibraciones indeseadas que son transferidas al robot y con las consiguientes imprecisiones en el control de la posición del cabezal de recogida.
Además, la placa con las levas está montada de modo deslizante sobre guías, sin la posibilidad de variar el perfil de las levas y sin la posibilidad de variar el número de dispositivos de recogida, ya que el desmontaje de los componentes para obtener estas variaciones podría comprometer la precisión del montaje de la placa en las guías, y
por consiguiente la precisión de deslizamiento y posicionamiento de la propia placa. Por lo tanto, en general, con tales soluciones conocidas el perfil de las levas no puede ser configurado de manera rápida y sencilla para adaptar el cabezal de recogida a diversas líneas de producción.
El documento US6068317A divulga un dispositivo de acuerdo al preámbulo de la reivindicación 1. El dispositivo incluye una placa elevadora desplazable en dirección ascendente y descendente a lo largo de una guía vertical, y un
árbol de leva montado de modo giratorio en la placa elevadora. El árbol de leva tiene una pluralidad de surcos de leva formados en una dirección radial en una superficie circunferencia externa, y es girado por un mecanismo de accionamiento. Una pluralidad de miembros de recogida son desplazables en una dirección horizontal a lo largo de una guía horizontal y tienen extremos superiores respectivos insertados en los surcos de leva.
El objeto de la presente invención es implementar un cabezal de recogida dotado de dispositivos de recogida
dispuestos lado con el lado con un espaciado variable, que permite resolver de modo simple y eficiente en costes los problemas anteriormente mencionados.
De acuerdo con la presente invención, se proporciona un cabezal de recogida como se define en la reivindicación 1.
La invención se describirá a continuación con referencia a los dibujos adjuntos, que ilustran un modo de realización no limitativo de la misma, en los cuales:
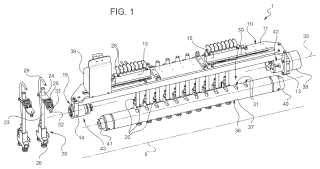
45 -la figura 1 es una vista posterior en perspectiva, con piezas en despiece, de un modo de realización preferido del cabezal de recogida dotado de dispositivos de recogida dispuestos lado con lado y con un espaciado variable de acuerdo con la presente invención;
- las figuras 2 y 3 muestran dos detalles de la figura 1 a una escala aumentada;
- la figura 4 es una vista en perspectiva inferior, con partes en despiece, del detalle de la figura 2; y
50 -la figura 5 es una vista lateral del cabezal de recogida de la figura 1.
En la figura 1, el número 1 indica en su conjunto un cabezal de recogida (ilustrado parcialmente) , que es desplazado por un robot (no mostrado) para transferir productos de una estación de recogida a una estación de almacenaje. Los productos que van a ser transferidos se disponen en la estación de recogida en una hilera a lo largo de una dirección horizontal 5, en posiciones fijas y a una distancia recíproca constante, predeterminada. La estación de almacenaje,
por el contrario, aloja una serie de recipientes en los cuales los productos tienen que ser empaquetados.
El cabezal de recogida 1 comprende una estructura de soporte 10, que está fijada en el extremo de un brazo del robot de un modo no mostrado y no descrito en detalle. La estructura 10 comprende: una placa horizontal superior 11 alargada paralelamente a la dirección 5 y reforzada por una aleta inferior 12 (figura 3) ; y dos salientes verticales 13, 14 fijados a los extremos axiales les opuestos de la placa 11.
La placa 11 sostiene dos distribuidores neumáticos 15 y una guía 16 (figura 4) , que están dispuestos en posiciones fijas en las caras superior e inferior de la placa 11, respectivamente.
Con referencia a las figuras 4 y 5, la guía 16 es horizontal y recta y se extiende paralelamente a la dirección 5; y el saliente 14 está conformado de modo que define un rebaje 19 delante de un extremo 17 de la guía 16, de modo que el extremo 17 quede abierto, para poder insertar/retirar los dispositivos de recogida 20 en la guía 16.
Los dispositivos de recogida 20 son iguales al número de productos que van a ser recogidos cada vez, denominados asimismo "dedos", y comprenden barras verticales 23 respectivas y bloques de soporte 24 respectivos. Los bloques 24 están fijados a los extremos superiores de las barras 23 y sostienen patines de deslizamiento 25 respectivos, que están dispuestos en posiciones fijas en la cara superior de los bloques 24 y están acoplados de modo deslizante a la guía 16.
Los dispositivos de recogida 20 comprenden además dispositivos de recogida 26 respectivos, que están acoplados en posiciones fijas a los extremos inferiores de las barras 23 y pueden ser activados para agarrar, sostener y liberar los productos respectivos. En concreto, los dispositivos de recogida 26 están definidos por sistemas de succión, por ejemplo, mediante parejas de ventosas, que en uso entran en contacto con la cara superior de los productos. Alternativamente, los dispositivos de recogida pueden estar definidos por un sistema de succión diferente o por
garras accionadas eléctrica o neumáticamente. En el ejemplo concreto mostrado en la figura 4, las ventosas 26 están conectadas a conectores 28 de los distribuidores 15 por medio de tubos flexibles 29 respectivos. A su vez, los distribuidores 15 conectan las ventosas 26 a un sistema neumático (no mostrado) para generar vacío de modo que se pueda crear un vacío en el área por debajo de las ventosas 26 cuando los productos necesitan ser recogidos. Los productos son liberados en la estación de almacenaje controlando válvulas de solenoide respectivas de los
distribuidores 15 a fin de hacer cesar dicho vacío o de modo que se genere una presión neumática menor entre las ventosas 26 y la cara superior de los productos.
Como se muestra en las figuras 1 a 3, el cabezal de recogida... [Seguir leyendo]
Reivindicaciones:
1. Cabezal de recogida (1) que comprende:
- una estructura de soporte (10) ;
- una guía horizontal (16) mantenida en una posición fija mediante dicha estructura de soporte (10) ;
- una pluralidad de dispositivos de recogida (26) accionables para agarrar y liberar productos (4) respectivos, dispuestos lado con lado y acoplados de un modo deslizante a dicha guía horizontal (16) ;
- medios de desplazamiento (30) para desplazar dichos dispositivos de recogida (26) a lo largo de dicha guía horizontal (16) entre una configuración compacta y una configuración agrandada, en las cuales dichos dispositivos de recogida (26) se sitúan con espaciados diferentes; comprendiendo dichos medios de
desplazamiento (30) :
para cada uno de dichos dispositivos de recogida, una leva (31) respectiva y un elemento de seguidor (32) respectivo; estando sostenidas las levas (31) por dicha estructura de soporte (10) , y estando acoplados los elementos de seguidor (32) respectivamente a dichos dispositivos de recogida (26) ;
al menos un actuador para desplazar las levas;
- un árbol o tambor (37) , que sostiene dichas levas (31) , se extiende a lo largo de un eje (35) paralelo a dicha guía horizontal (16) , y es activado por dicho actuador (38) para girar alrededor de dicho eje (35) ; y
- medios de unión (42, 43) que conectan dicho árbol o tambor (37) a dicha estructura de soporte (10) de un modo retirable;
caracterizado porque dichos medios de unión (42, 43) comprenden dos cuerpos de soporte (44, 58) que están 20 acoplados de modo giratorio a dicha estructura de soporte (10) alrededor de dicho eje (35) ; estando fijos los extremos axiales (40, 41) de dicho árbol o tambor (31) a dichos cuerpos de soporte (44, 58) de un modo retirable.
2. Cabezal de recogida de acuerdo con la reivindicación 1, caracterizado porque dicho árbol o tambor (37) es retirable y ajustable con relación a dichos cuerpos de soporte (44, 58) en una dirección perpendicular a dicho eje (35) .
3. Cabezal de recogida de acuerdo con la reivindicación 2, caracterizado porque dichos medios de unión (42, 43) comprenden dos elementos de retención (53, 65) , que son desplazables axialmente entre dos posiciones para bloquear y, respectivamente, liberar dichos extremos axiales (40, 41) .
4. Cabezal de recogida de acuerdo con la reivindicación 3, caracterizado porque uno de dichos elementos de
retención (53) está definido por una clavija, que es deslizable axialmente en un orificio axial (54) realizado en uno de 30 o bien el cuerpo de soporte o el extremo de dicho árbol o tambor (37) .
5. Cabezal de recogida de acuerdo con la reivindicación 3, caracterizado porque uno de dichos elementos de retención (65) está definido por un manguito externo sostenido bien por uno del cuerpo de soporte o del extremo de dicho tambor.
6. Cabezal de recogida de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque dicha
estructura de soporte (10) tiene una abertura lateral (19) para retirar/insertar dichos dispositivos de recogida (26) en dicha guía (16) .
7. Cabezal de recogida de acuerdo con la reivindicación 6, caracterizado porque dicha estructura de soporte (10) comprende unos salientes verticales (13; 14) primero y segundo dispuestos en lados axiales opuestos de dicho árbol
o tambor (37) ; estando asociado el primer saliente (13) con la entrada de movimiento de dicho actuador (38) , y 40 definiendo el segundo saliente (14) dicha abertura lateral (19) .
8. Cabezal de recogida de acuerdo con la reivindicación 7, caracterizado porque dichos medios de unión (42, 43) comprenden un dispositivo de unión (43) conectado a dicho segundo saliente (14) y que tiene una dimensión radial externa menor que la distancia radial de dichos elementos de seguidor (32) desde dicho eje (25) .
9. Cabezal de recogida de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque dichos
45 dispositivos de recogida (26) están conectados a los elementos de seguidor (32) por barras verticales (23) respectivas, situadas delante de dichas levas (31) ; estando definidos dichos elementos de seguidor (32) por rodillos libres que giran alrededor de ejes verticales respectivos y colgando en la parte inferior por placas (33) respectivas, que están situadas por encima de dichas levas (31) y están fijas con respecto a dichas barras (23) respectivas.
Patentes similares o relacionadas:
Dispositivo y procedimiento para desembalar y alimentar envueltas de envase plegadas de manera plana y verticales, del 10 de Junio de 2020, de SIG TECHNOLOGY AG: Dispositivo para transferir envolturas de envase plegadas de manera plana y verticales a una unidad de procesamiento subsiguiente, en particular una máquina llenadora para […]
Ventosa de aspiración y procedimiento para asir rodajas elásticas, del 27 de Mayo de 2020, de DEUTSCHES INSTITUT FUR LEBENSMITTELTECHNIK E.V.: Ventosa de aspiración para el uso como dispositivo de separación de rodajas elásticas de una pila de rodajas, con una campana de aspiración […]
Estación automática para recoger artículos y procedimientos relacionados para usar, del 26 de Febrero de 2020, de CT PACK S.R.L.: Una estación automática para recoger artículos (A) que comprende: - un sistema de movimiento que comprende un transportador que define una superficie […]
Dispositivo para recoger artículos, del 15 de Enero de 2020, de CT PACK S.R.L.: Un dispositivo para recoger artículos , que comprende una unidad de soporte y una pluralidad de cabezales de agarre portados mediante la unidad de soporte , […]
Silenciador para pinza de succión, del 25 de Diciembre de 2019, de DEUTSCHES INSTITUT FUR LEBENSMITTELTECHNIK E.V.: Silenciador con una carcasa dotada de una entrada que puede unirse con el conducto de gas de escape de una pinza de succión y con […]
Ventosa con faldón separable, del 4 de Diciembre de 2019, de VTEC Co. Ltd: Ventosa con faldón separable que comprende: un cuerpo hueco (11, 31, 41 o 51) que tiene un conducto formado verticalmente a través de él, una protuberancia anular […]
Dispositivo de ventosas y transportador por aspiración con un dispositivo de ventosas de este tipo, del 9 de Octubre de 2019, de Putz, Stefan: Dispositivo de ventosas para un transportador por aspiración que comprende una ventosa para recoger un producto, en donde la ventosa define una cámara de aspiración […]
Dispositivo de transporte de piezas y método para transportar piezas, del 17 de Abril de 2019, de FAGOR ARRASATE, S. COOP: Dispositivo de transporte de piezas, en particular de piezas en forma de placa, que comprende un medio transportador para transportar […]