PROCEDIMIENTO Y SISTEMA PARA DETERMINAR DATOS DE POSICIÓN DE UN OBJETO.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06003242.
Solicitante: VODAFONE HOLDING GMBH.
Nacionalidad solicitante: Alemania.
Dirección: MANNESMANNUFER 2 40213 DUSSELDORF ALEMANIA.
Inventor/es: ROBL,CHRISTIAN,DR.-ING.
Fecha de Publicación: .
Fecha Solicitud PCT: 17 de Febrero de 2006.
Clasificación Internacional de Patentes:
- G01S19/42 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Determinación de la posición.
- G07B15/06 G […] › G07 DISPOSITIVOS DE CONTROL. › G07B APARATOS DE ENTREGA DE TIQUES; TAXIMETROS; DISPOSICIONES O APARATOS PARA COBRAR EN UN PUNTO DE CONTROL EL PRECIO DE LOS BILLETES O LOS DERECHOS DE ENTRADA O DE PEAJE; APARATOS PARA FRANQUEAR. › G07B 15/00 Dispositivos o aparatos para cobrar el precio de los billetes, el peaje o las entradas en uno o más puntos de control (monedas o papeles de valor, p. ej. billetes G07D; aparatos para la venta o el alquiler de artículos o de servicios accionados por monedas, tarjetas de crédito, billetes o similares G07F 7/00, G07F 17/00). › Disposiciones para tarificación vial o peaje urbano de vehículos o usuarios de vehículos, p. ej. sistema automático de peaje.
Clasificación PCT:
- G01C21/26 G01 […] › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › especialmente adaptados para la navegación en una red de carreteras.
- G07B15/00 G07B […] › Dispositivos o aparatos para cobrar el precio de los billetes, el peaje o las entradas en uno o más puntos de control (monedas o papeles de valor, p. ej. billetes G07D; aparatos para la venta o el alquiler de artículos o de servicios accionados por monedas, tarjetas de crédito, billetes o similares G07F 7/00, G07F 17/00).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2373673_T3.pdf
Fragmento de la descripción:
Procedimiento y sistema para determinar datos de posición de un objeto La presente invención se refiere a un procedimiento y un sistema para determinar datos de posición de un objeto.
Ya se conoce la utilización de un procedimiento de localización de posición asistido por satélite para el seguimiento de la posición de objetos, particularmente de vehículos. En particular se conoce la utilización de un “Global Positioning System (sistema de posicionamiento global) ” (GPS) para la que se ha previsto un receptor de GPS en el vehículo.
Los datos de posición así obtenidos, que en un sistema GPS también se llaman valores fijos (fix) , se pueden utilizar para diferentes fines. Por ejemplo, estos datos de posición se pueden enviar a un sistema de navegación y utilizar como magnitud de partida para un sistema de tasas con el fin de calcular una tasa de utilización de tramos (sistema de peaje) o para el control del tránsito por una región con fines demoscópicos.
El documento US 6230097 B1 describe un procedimiento y un sistema para la navegación precisa de vehículos. En este caso se trata de un, así llamado, sistema asistente del conductor con el que, en determinadas situaciones, el vehículo se encarga de algunas funciones o emite alarmas. Las coordenadas de posición necesarias para este fin son captadas por un sistema asistido por satélite. Para corregir las señales de determinación de la posición se utiliza por ejemplo un DGPS ó WAAS con el que se generan los datos de corrección que se procesan después con la señal LD recibida, pudiendo así calcular la posición actual del vehículo. Por otro lado, en el documento DE 4402614 A1 se describe un procedimiento para el cálculo de tasas por la utilización de vías públicas por vehículos, con el que se determina de forma continua la posición geográfica de un vehículo con ayuda de localización por radio, en particular con el sistema GPS, y se compara con posiciones geográficas de puntos de recaudación virtuales. Los puntos de recaudación virtuales están formados por tramos de registro que se extienden a lo largo de distancias predeterminadas en la dirección de la vía pública correspondiente. El documento US 6748322 B1 describe un sistema para el control y la localización de un vehículo mediante la utilización de un sistema GPS y la comparación de los valores fijos de posición y de la velocidad con una tarjeta computerizada, en la que se especifican límites para la velocidad y el territorio. El documento US 2003/0016143 A1 describe un sistema para impedir colisiones de vehículos en cruces. Este sistema pone sobre aviso al conductor de un vehículo cuando éste no frena al acercarse a un cruce, en particular un cruce en el que el semáforo se ha puesto amarillo o rojo. La velocidad del vehículo se determina a través de un comparador de sensores de velocidad y la dirección del vehículo, por ejemplo mediante un receptor de GPS. Finalmente, el documento DE 4344433 A1 describe un sistema de registro para tasas de autopista por medio de una pegatina del peaje electrónica. En este caso, las coordenadas de posición del vehículo se determinan de modo continuo a través de un receptor GPS y se comparan con coordenadas de entrada y salida de tramos de autopista, almacenadas de forma fija. Si coinciden, los datos de coordenadas se transmiten a un punto central de liquidación.
En esta aplicación es necesario poder reconocer de modo fiable una posición parada de un vehículo para, por ejemplo, en un sistema de peaje evitar una aplicación múltiple de tasas si el vehículo está parado. En un sistema de navegación también tiene especial importancia el reconocimiento fiable de la posición de parada, puesto que en esta situación se ajustan las diferentes señales de localización. Para poder reconocer la situación de parada se utilizan sensores de giro, sensores de aceleración o sensores de procesamiento de imagen.
En el documento DE 10010607 A1 se describe por ejemplo un sistema de navegación que dispone de una unidad de recepción y evaluación de señales de satélite para la determinación de posición. Para distinguir entre una situación de movimiento y una situación de parada del vehículo se utiliza un sensor dispuesto en el vehículo. Este sensor puede consistir en un sensor de dirección por ejemplo en forma de un sensor de revoluciones. En este sistema de navegación, la distinción entre una situación de parada y una situación de movimiento se realiza utilizando las interferencias de la señal del sensor como criterio de diferenciación.
Los sistemas del estado actual de la técnica tienen la desventaja de que, además del sistema GPS, es necesario disponer de un hardware de sensores, que el sensor debe integrar en el sistema y que sus datos han de procesarse por separado. Se produce un coste adicional debido a la fusión de sensores a realizar, que se puede llevar a cabo mediante la utilización de un filtro de Kalman.
Por consiguiente, el objetivo de la presente invención consiste en proporcionar un procedimiento y un sistema que permitan aumentar la integridad de los valores de registro de un sistema de localización asistido por satélite para determinadas aplicaciones, como por ejemplo sistemas de navegación y/o sistemas de peaje.
La invención se basa en el conocimiento de que este objetivo se puede alcanzar mediante la utilización de criterios para el aumento de la integridad proporcionados por el propio sistema asistido por satélite.
Por consiguiente, este objetivo se resuelve con un procedimiento conforme a las características indicadas en la reivindicación 1 y un sistema con las características indicadas en la reivindicación 15. Otros desarrollos de la invención y tipos de ejecución preferentes son objeto de las reivindicaciones dependientes.
Las ventajas y características que se describen en relación con el procedimiento según la invención también son válidas – siempre que sean aplicables – para el sistema según la invención y viceversa.
Según un primer aspecto de la invención, ésta se refiere a un procedimiento para determinar datos de posición de un objeto, en el que se transmiten señales para la determinación de una posición desde un sistema de detección de posición a un receptor asignado a un objeto, donde se determinan indicaciones sobre la posición a partir de las señales registradas, siendo sometidos los datos de posición enviados al receptor a una comprobación, utilizándose al menos un atributo del receptor como criterio de comprobación y comparándose el valor del atributo o los atributos con al menos un valor umbral. El procedimiento se caracteriza porque al menos un atributo representa una distancia y/o ángulo deducido a partir de al menos un dato de posición registrado con anterioridad y con respecto a dato de posición actual y porque el valor umbral para la distancia y/o el ángulo se determina en función de la velocidad del receptor.
Un objeto en el sentido de esta invención consiste principalmente en un vehículo, preferentemente un automóvil. Como atributos del receptor se designan en el sentido de la invención aquellos datos que, además de la simple indicación sobre la posición en forma de coordenadas, se pueden determinar a partir de las señales transmitidas por el sistema de detección de posición al receptor con el fin de determinar la posición, o se pueden deducir a partir de los datos de posición determinados. Los datos de posición determinados a partir de las señales para la determinación de posición también se designan en adelante como datos de posición registrados o determinados. Para cada dato de posición existe el valor de los atributos o éste se puede deducir. Como atributos se pueden utilizar, por ejemplo, la velocidad del receptor (speed) y/o el ángulo del receptor (course) . Otro atributo puede ser, por ejemplo, la distancia espacial entre posiciones registradas, que en adelante se designan como valores fijos (fixes) . Finalmente, como atributos adicionales se pueden utilizar otros datos de dirección del receptor que representan magnitudes deducidas. Pueden ser atributos, particularmente, el curso teórico, la dirección del movimiento y/o el ángulo entre las direcciones de movimiento del receptor en dos posiciones del receptor.
Mediante la comparación del valor de un atributo con al menos un valor umbral se puede comprobar el cumplimiento de una condición susceptible de predeterminarse. Para esta comparación no se requieren valores que tengan que ser registrados por otros sensores. Más bien, para la comparación se utilizan atributos... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para determinar datos de posición de un objeto, en el que un sistema de detección de posiciones (7) transmite señales para la determinar los datos de posición de un receptor (9) asignado al objeto, donde a partir de las señales registradas se determinan datos de posición, sometiéndose los datos de posición transmitidos al receptor a una comprobación, utilizándose al menos un atributo del receptor como criterio de comprobación y comparándose el valor del atributo o los atributos con al menos un valor umbral, caracterizado porque al menos un atributo representa una distancia y/o ángulo deducido de al menos un dato de posición registrado con anterioridad a un dato de posición actual y porque el valor umbral para la distancia y/o el ángulo se determina en función de la velocidad del receptor.
2. Procedimiento según la reivindicación 1, caracterizado porque los datos de posición se filtran en función del resultado de la comprobación.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado porque los valores de al menos dos atributos se comparan con valores umbral.
4. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado porque los valores de un atributo se comparan con al menos dos valores umbral, representando uno de los valores umbral un valor mínimo y el otro valor umbral un valor máximo.
5. Procedimiento según una de las reivindicaciones 1 a 4, caracterizado porque el valor umbral para al menos un atributo se determina en función de al menos otro atributo.
6. Procedimiento según una de las reivindicaciones 1 a 5, caracterizado porque el valor de al menos un atributo se determina a partir de datos de posición registrados con anterioridad.
7. Procedimiento según una de las reivindicaciones 1 a 6, caracterizado porque al menos un atributo representa la velocidad del receptor.
8. Procedimiento según una de las reivindicaciones 1 a 7, caracterizado porque al menos un atributo representa un dato de la dirección del receptor, en particular del curso teórico y/o la dirección de desplazamiento del receptor y/o del ángulo entre las direcciones de desplazamiento del receptor en dos posiciones del receptor.
9. Procedimiento según una de las reivindicaciones 1 a 8, caracterizado porque al menos el valor de un atributo de un dato de posición registrado con anterioridad se compara con un valor umbral.
10. Procedimiento según una de las reivindicaciones 1 a 9, caracterizado porque para la comprobación, además de al menos un atributo del receptor, se utiliza al menos un dato referente a la transmisión por satélite, en particular una degradación de la precisión.
11. Procedimiento según una de las reivindicaciones 1 a 10, caracterizado porque con la comprobación se verifica si los datos de posición registrados son datos válidos.
12. Procedimiento según una de las reivindicaciones 1 a 11, caracterizado porque durante la comprobación se verifica si unos datos de posición registrados anteriormente se puede sobrescribir con unos datos de posición actual.
13. Procedimiento según una de las reivindicaciones 1 a 12, caracterizado porque durante la comprobación se verifica al menos si los datos de posición registrados se pueden utilizar para determinar otros valores de atributos.
14. Procedimiento según una de las reivindicaciones 1 a 13, caracterizado porque los datos de posición determinados mediante el procedimiento se utilizan como coordenadas de partida para un sistema de cobro de peaje.
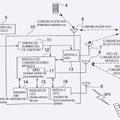
15. Sistema para determinar datos de posición de un objeto, que incluye al menos un receptor (9) para recibir datos de posición basados en un sistema de satélites y una unidad de reconocimiento (10, 11) para reconocer la parada de un objeto, estando la unidad de reconocimiento (10, 11) asignada al receptor (9) y comprendiendo la unidad de reconocimiento (10, 11) una unidad de comparación (11) que sirve para determinar la pertinencia de datos de posición a un campo predeterminado, representando este campo un campo de admisibilidad cuyos valores umbral se determinan para la distancia entre datos de posición y/o para un ángulo de la dirección de desplazamiento en función de la velocidad del receptor.
16. Sistema según la reivindicación 15, caracterizado porque la unidad de reconocimiento (10, 11) está incluida en un dispositivo de control, en especial una “on-board-unit (unidad de a bordo) ” (8) de un sistema de registro de tasas (12) , y representa en particular un programa.
17. Sistema según una de las reivindicaciones 15 a 16, caracterizado porque tiene una interfaz, en particular una interfaz aérea, con un sistema de registro de tasas (12) .
18. Sistema según la reivindicación 17, caracterizado porque a través de la interfaz se pueden transmitir datos de posición que han sido determinados en el receptor.
REFERENCIAS CITADAS EN LA DESCRIPCIÓN
La lista de referencias citada por el solicitante lo es solamente para utilidad del lector, no formando parte de los documentos de patente europeos. Aún cuando las referencias han sido cuidadosamente recopiladas, no pueden excluirse errores u omisiones y la OEP rechaza toda responsabilidad a este respecto.
Documentos de patente citados en la descripción
•US 6230097 B1 [0004] • US 20030016143 A1 [0004]
• DE 4402614 A1 [0004] • DE 4344433 A1 [0004]
• US 6748322 B1 [0004] • DE 10010607 A1 [0006]
Patentes similares o relacionadas:
Determinación de posición usando mediciones de épocas pasadas y presentes, del 26 de Febrero de 2020, de QUALCOMM INCORPORATED: Un procedimiento para determinar una solución de navegación que comprende: obtener información del sistema de navegación inercial, […]
Dispositivo de comunicación inalámbrica montable en objeto móvil, sistema de control de monitoreo de dispositivo de comunicación inalámbrica montable en objeto móvil, método de control de monitoreo de dispositivo de comunicación inalámbrica montable en objeto móvil y centro de control remoto, del 18 de Diciembre de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un dispositivo de comunicación inalámbrica configurado para ser montado en un objeto móvil, incluyendo el dispositivo de comunicación […]
Uso de estaciones móviles para la determinación de parámetros de localización de estaciones base en un sistema de comunicación móvil inalámbrico, del 20 de Septiembre de 2017, de QUALCOMM INCORPORATED: Un procedimiento para determinar la posición de una estación base en una red de comunicación inalámbrica, comprendiendo el procedimiento: […]
Asistente para la práctica de golf personal y método y sistema para mostrar gráficamente información relacionada con golf y para recoger, procesar y distribuir datos relacionados con golf, del 21 de Junio de 2017, de Skyhawke Technologies, LLC: Un aparato portátil para mostrar distancias entre un golfista y un objeto en un campo de golf, que comprende: un dispositivo informático; un dispositivo de medición […]
Proporcionar y usar mensajes que comprenden información de localización, del 22 de Marzo de 2017, de Nokia Technologies OY: Un método que comprende: recibir o ensamblar un mensaje que incluye información de localización y un identificador de tiempo de referencia, […]
Procedimiento de determinación de la posición de un receptor de sistema de navegación por satélite, y sistema asociado, del 25 de Enero de 2017, de THALES: Procedimiento de determinación de la posición de un receptor de sistema de navegación por satélite en el que se utiliza una ponderación […]
 Dispositivo de comunicaciones inalámbricas montable en objeto móvil, sistema de control de monitoreo de dicho dispositivo, método de control de monitoreo del mismo y centro de control remoto, del 6 de Abril de 2016, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un dispositivo de comunicaciones inalámbricas con una función de enrutador inalámbrico montable en un vehículo, que incluye: una unidad de comunicaciones móviles que puede […]
Dispositivo de comunicaciones inalámbricas montable en objeto móvil, sistema de control de monitoreo de dicho dispositivo, método de control de monitoreo del mismo y centro de control remoto, del 6 de Abril de 2016, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un dispositivo de comunicaciones inalámbricas con una función de enrutador inalámbrico montable en un vehículo, que incluye: una unidad de comunicaciones móviles que puede […]
 Procedimiento de estimación de la dirección de llegada de señales de navegación en un receptor después de la reflexión por unas paredes en un sistema de posicionamiento por satélite, del 16 de Febrero de 2016, de THALES: Procedimiento de estimación de la dirección de llegada de señales de navegación en un receptor tras la reflexión por unas paredes en un sistema de posicionamiento por […]
Procedimiento de estimación de la dirección de llegada de señales de navegación en un receptor después de la reflexión por unas paredes en un sistema de posicionamiento por satélite, del 16 de Febrero de 2016, de THALES: Procedimiento de estimación de la dirección de llegada de señales de navegación en un receptor tras la reflexión por unas paredes en un sistema de posicionamiento por […]