PROCEDIMIENTO Y SISTEMA DE LOCALIZACIÓN Y DISPOSITIVO PORTÁTIL LOCALIZABLE.
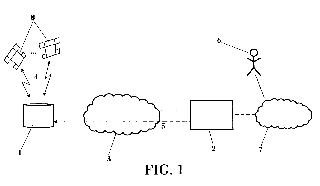
Procedimiento de localización de un dispositivo portátil (1) desde un servidor (2) configurado para comunicarse con dicho dispositivo portátil (1) a través de una red de comunicaciones inalámbrica (3),
con las etapas de: enviar desde el servidor (2) hacia el dispositivo portátil (1) información de asistencia GPS a través de dicha red de comunicaciones inalámbrica (3); obtener en un módulo de posicionamiento AGPS (11) una señal GPS (4) procedente de un sistema satelital (8); calcular una localización del propio dispositivo (1) a partir de dicha señal GPS (4) y de información de asistencia GPS; y enviar dicha localización hacia el servidor (2). Además, el procedimiento comprende: cuando el dispositivo portátil (1) se detiene, hibernar el módulo de posicionamiento AGPS (11), el módulo de transmisión/recepción (12) y un microprocesador (15) que gestiona dichos módulos (11, 12), de forma que se ahorra batería y se aumenta así la autonomía del dispositivo portátil (1); y cuando el dispositivo portátil (1) se conecta mediante un cable externo (19) a un vehículo, dicho dispositivo portátil (1) y dicho cable externo (19) forman un dispositivo localizador para el entorno de automoción (10), el cual es útil como sistema antirrobo indetectable por ser radioeléctricamente transparente.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200800757.
Solicitante: NAVENTO TECHNOLOGIES, S.L.
Nacionalidad solicitante: España.
Inventor/es: MEDINA HERRERO,MIGUEL ANGEL, DIAZ DIAZ,ALEJANDRA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S19/21 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Problemas relacionados con interferencias.
- G01S19/34 G01S 19/00 […] › Consumo de energía.
- G01S5/00 G01S […] › Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia.
Fragmento de la descripción:
Procedimiento y sistema de localización y dispositivo portátil localizable.
Campo de la invención
La presente invención se aplica al campo de los procedimientos y sistemas de localización, incluyendo los procedimientos y sistemas de localización de vehículos mediante GPS asistido.
Antecedentes de la invención
El sistema GPS convencional se compone de una red de satélites de órbita no geoestacionaria, una red de control y mantenimiento de la red de satélites y una serie de receptores capaces de calcular su posición en las proximidades de la superficie terrestre.
El sistema GPS convencional posee ciertas limitaciones, debidas fundamentalmente a la baja potencia emitida por los satélites y a la baja tasa de transmisión de información enviada. Estas características tienen como consecuencia que el tiempo necesario para fijar posición desde el encendido del receptor (TTFF, en inglés, "Time To First Fix") es elevado (varios minutos). Además, la capacidad de recepción queda, en general, limitada a zonas con visibilidad directa sobre los satélites.
La solicitud de patente internacional WO2006/000605 describe un dispositivo para el análisis de la actividad de una persona y para la detección automática de caldas. La posición de una persona se detecta mediante un sistema GPS convencional y, con objeto de supervisar si la persona se cae al suelo, mide continuamente la aceleración del dispositivo (mediante un acelerómetro), de forma que la caída se asocia con un determinado valor de aceleración instantánea. Este dispositivo está diseñado para la detección de caldas, pero como detector de posiciones absolutas su rendimiento es bajo, especialmente en interiores, donde las señales GPS pierden fácilmente cobertura.
El modelo de GPS convencional se ha visto mejorado por el empleo de la tecnología A-GPS (GPS Asistido, en inglés, "Assisted GPS"), que impacta directamente sobre el TTFF y sobre la sensibilidad de los receptores, extendiendo la recepción a zonas sin visibilidad directa. La tecnología A-GPS se basa en, además de la comunicación con los satélites GPS, el empleo de cierta información adicional o asistencia que es recibida por otros medios o elementos externos (tales como un servidor del sistema) que ayuda en la localización del receptor.
Esta asistencia puede comprender información de posición aproximada del dispositivo, información de la posición de los satélites y/o de información de reloj. En función del fabricante y del sistema, la información de asistencia está compuesta por los tres tipos de información mencionados o por sólo alguno de ellos.
Con la información de asistencia, que posee una validez temporal y por ello se descarga de forma periódica desde el servidor al dispositivo receptor, se producen las siguientes mejoras: Se reduce el TTFF (tiempos de adquisición de las señales GPS), ya que el receptor consigue sincronizarse más rápidamente con la señal de los satélites y no necesita decodificar dicha señal, pues conoce a priori la información que va a recibir de ellos. Por tanto, se reduce el tiempo necesario para la localización; Se aumenta la sensibilidad y precisión de la localización, permitiendo fijar la posición en entornos complicados, tales como grandes entornos urbanos e interiores; Se reduce el consumo de batería, aumentando la autonomía del sistema.
Por otra parte, uno de los principales problemas presentes en los dispositivos portátiles de localización es la baja autonomía que tienen, es decir, el reducido número de horas de uso que permiten sin necesidad de recargar su batería. Las dificultades presentes en los intentos de mejora de carga máxima de las baterías de estos dispositivos han llevado a los diseñadores de los mismos a optimizar los sistemas de control de consumo de estos dispositivos, permitiendo la hibernación de los módulos principales en el caso de que no se estén usando en un determinado periodo de tiempo. Así, por ejemplo, en dispositivos de localización que utilizan la telefonía móvil (GSM/GPRS) para transmitir su posición, el consumo del módulo de GSM/GPRS es reducido al mínimo en el caso de que el dispositivo únicamente se encuentre conectado con la operadora de telefonía móvil y no esté realizando ninguna transacción de información.
La solicitud de patente japonesa JP11083529 describe un dispositivo capaz de ser localizado gracias a la combinación de un receptor GPS, un acelerómetro y un giroscopio. Gracias a esta combinación, el sistema trata de minimizar el consumo de batería. Sin embargo, la localización del dispositivo siempre se realiza de forma local en el propio dispositivo, sin hacer uso de un elemento externo como un servidor, lo cual ralentiza el cálculo y perjudica el rendimiento de la localización.
La solicitud de patente japonesa JP10221427 también describe un dispositivo capaz de ser localizado mediante un sistema de posicionamiento GPS, en el que un módulo de transmisión se apaga cuando se pierde la cobertura GPS. Se ahorra así batería. Sin embargo, al igual que en el caso anterior, la localización del dispositivo también se consigue de forma local, por lo que no se optimiza el cálculo y se perjudica el rendimiento de la localización.
Aunque existen sistemas que hacen uso de la tecnología de localización AGPS mencionada anteriormente, el funcionamiento habitual de estos sistemas consiste en tener apagado totalmente el módulo AGPS hasta que se reciba una petición de localización. Lamentablemente, la conmutación de apagado a encendido de dicho módulo AGPS penaliza la autonomía del dispositivo, pues el consumo energético derivado de encender y activar totalmente un módulo AGPS, con el intercambio de señalización e información que eso conlleva, es muy elevado.
Resumen de la invención
La presente invención resuelve los problemas anteriormente mencionados mediante un procedimiento que, gracias a la combinación del uso de sensores presentes en el dispositivo portátil y del uso de la tecnología de localización AGPS, permite reducir el consumo de batería de un sistema de localización GPS. Es decir, se aumenta la autonomía del dispositivo y se mejora la calidad del sistema, ya que se reduce el tiempo de localización del dispositivo y el consumo de batería y se aumenta la precisión de la localización obtenida.
En un aspecto de la presente invención, se proporciona un procedimiento de localización de un dispositivo portátil desde un servidor configurado para comunicarse con dicho dispositivo portátil a través de una red de comunicaciones inalámbrica. El procedimiento comprende las etapas de: enviar desde el servidor hacia el dispositivo portátil información de asistencia GPS a través de dicha red de comunicaciones inalámbrica; obtener en un módulo de posicionamiento AGPS del dispositivo portátil una señal GPS procedente de un sistema satelital; calcular en dicho dispositivo portátil una localización del propio dispositivo a partir de dicha señal GPS y de la información de asistencia GPS enviada por el servidor; enviar dicha localización hacia el servidor. Además, el procedimiento comprende las etapas de: cuando el dispositivo portátil se detiene, hibernar el módulo de posicionamiento AGPS, el módulo de transmisión/recepción y un microprocesador de dicho dispositivo portátil que gestiona dichos módulos, de forma que se ahorra batería y se aumenta así la autonomía del dispositivo portátil; y cuando el dispositivo portátil se conecta mediante un cable externo a un vehículo, dicho dispositivo portátil y dicho cable externo forman un dispositivo localizador para el entorno de automoción, el cual se alimenta de una batería de dicho vehículo.
En otro aspecto de la presente invención, se proporciona un dispositivo portátil que comprende: medios de posicionamiento global AGPS configurados para recibir una señal GPS desde una red de satélites GPS; medios de transmisión/recepción configurados para conectarse a una red de comunicaciones inalámbrica y recibir a través de la misma, procedentes de un servidor, al menos, información de asistencia GPS y peticiones de localización; donde dicho dispositivo portátil es capaz de calcular su posición a partir de dicha información de asistencia GPS y de dicha señal GPS y para enviar dicha posición hacia dicho servidor. El dispositivo portátil comprende además medios sensores de movimiento capaces de captar una información utilizable para hibernar o interrumpir la hibernación de dichos módulos de posicionamiento AGPS y transmisión/recepción, en función...
Reivindicaciones:
1. Procedimiento de localización de un dispositivo portátil (1) desde un servidor (2) configurado para comunicarse con dicho dispositivo portátil (1) a través de una red de comunicaciones inalámbrica (3), donde el procedimiento comprende las etapas de:
- enviar desde el servidor (2) hacia el dispositivo portátil (1) información de asistencia GPS a través de dicha red de comunicaciones inalámbrica (3);
- obtener en un módulo de posicionamiento AGPS (11) del dispositivo portátil (1) una señal GPS (4) procedente de un sistema satelital (8);
- calcular en dicho dispositivo portátil (1) una localización del propio dispositivo (1) a partir de dicha señal GPS (4) y de la información de asistencia GPS enviada por el servidor (2);
- enviar dicha localización hacia el servidor (2);
caracterizado por que el procedimiento comprende las etapas de:
- cuando el dispositivo portátil (1) se detiene, hibernar el módulo de posicionamiento AGPS (11), el módulo de transmisión/recepción (12) y un microprocesador (15) de dicho dispositivo portátil (1) que gestiona dichos módulos (11, 12), de forma que se ahorra batería y se aumenta así la autonomía del dispositivo portátil (1); y
- cuando el dispositivo portátil (1) se conecta mediante un cable externo (19) a un vehículo, dicho dispositivo portátil (1) y dicho cable externo (19) forman un dispositivo localizador para el entorno de automoción (10), el cual se alimenta de una batería de dicho vehículo.
2. Procedimiento según la reivindicación 1, donde la etapa de hibernar dichos módulos (11, 12) y dicho microprocesador (15) la realiza el propio dispositivo portátil (1) en función de al menos la información obtenida de unos medios sensores de movimiento (14) capaces de detectar el movimiento de dicho dispositivo (1).
3. Procedimiento según cualquiera de las reivindicaciones 1 ó 2, donde el dispositivo portátil (1) calcula, a partir de dicha información comprendida en dicha señal GPS (4), la velocidad del propio dispositivo (1), utilizándose dicha información relativa a la velocidad del dispositivo (1) para tomar la decisión de hibernar dichos módulos (11, 12) y dicho microprocesador (16).
4. Procedimiento según cualquiera de las reivindicaciones anteriores donde, antes la etapa de hibernar dichos módulos (11, 12) y dicho microprocesador (16), el dispositivo (1) envía al servidor (2):
- la última localización obtenida por el módulo de posicionamiento AGPS (11),
- localizaciones precedentes almacenadas en el dispositivo (1), si las hubiera;
e informa al servidor (2) de que va a hibernar dichos módulos (11, 12) y dicho microprocesador (16).
5. Procedimiento según cualquiera de las reivindicaciones anteriores donde, dicho cálculo de la localización de dicho dispositivo (1) se realiza en un modo bajo demanda, es decir, como respuesta a una petición puntual de un usuario (6), petición puntual que se realiza a través de dicho servidor (2).
6. Procedimiento según cualquiera de las reivindicaciones 1 a 4, donde, dicho cálculo y envío de la localización de dicho dispositivo (1) se realiza en un modo seguimiento, es decir, se repite de forma periódica, siempre que haya cobertura GPS, cada un cierto periodo de tiempo, a petición de un usuario (6) que determina dicho periodo de tiempo, a través de dicho servidor (2).
7. Procedimiento según la reivindicación 6, donde si el dispositivo (1) pierde cobertura de la red de comunicaciones inalámbrica (3), el dispositivo (1) almacena en una memoria local (16) todas las localizaciones calculadas en función de dicho modo seguimiento y que no se hayan enviado al servidor (2) por falta de cobertura de la red de comunicaciones inalámbrica (3), y se envían al servidor (2) cuando el dispositivo (1) recupera dicha cobertura.
8. Procedimiento según la reivindicación 5, que comprende la etapa de cambiar el modo de obtención de localizaciones del dispositivo (1) de modo bajo demanda, es decir, de peticiones puntuales realizadas por dicho usuario (6), a modo seguimiento, es decir, a peticiones periódicas cada un cierto periodo de tiempo, a petición de dicho usuario (6), que determina dicho periodo de tiempo, a través de dicho servidor (2).
9. Procedimiento según la reivindicación 6, que comprende la etapa de cambiar el modo de obtención de localizaciones del dispositivo (1) de modo seguimiento, es decir, peticiones periódicas realizadas cada un cierto periodo de tiempo, a modo bajo demanda, es decir, a peticiones puntuales que se realizan como respuesta a una petición puntual de dicho usuario (6), petición que se realiza a través de dicho servidor (2).
10. Procedimiento según la reivindicación 8 ó 9, donde el dispositivo (1), cada vez que se conecta al servidor (2) a través de dicha red de comunicaciones inalámbrica (3), chequea si en dicho servidor (2) hay una solicitud demandada por un usuario (6) de cambio de modo seguimiento a modo bajo demanda, o viceversa, y si es así, efectuar dicho cambio.
11. Procedimiento según cualquiera de las reivindicaciones anteriores donde, si, estando los módulos de posicionamiento AGPS (11) y de transmisión/recepción (12) encendidos, se pierde la cobertura GPS por parte del módulo de posicionamiento AGPS (11), el dispositivo portátil (1) le envía al servidor (2):
- la última localización obtenida por el módulo de posicionamiento AGPS (11), y
- localizaciones precedentes almacenadas en el dispositivo (1), si las hubiera;
e informa al servidor (1) de que ha perdido la cobertura GPS.
12. Procedimiento según cualquiera de las reivindicaciones 1 a 4 donde, si el dispositivo (1) comienza a moverse después de haber estado detenido y con los módulos de posicionamiento AGPS (11) y de transmisión/recepción (12) hibernados, se producen las etapas de:
- encender el módulo de posicionamiento AGPS (11),
- encender el módulo de transmisión/recepción (12),
- informar al servidor (2) del encendido de dichos módulos (11, 12) y de que se encuentra intentando obtener cobertura GPS.
13. Procedimiento según cualquiera de las reivindicaciones anteriores, donde el dispositivo portátil (1) puede ser apagado de forma voluntaria mediante una llave codificada (18) que posee el portador del dispositivo o de forma automática por agotamiento de la batería del propio dispositivo portátil (1).
14. Procedimiento según la reivindicación 13, donde el dispositivo portátil (1), antes de apagarse:
- informa al servidor (2) de que va a apagarse;
- envía al servidor (2) la última localización obtenida por el módulo de posicionamiento AGPS (11) y
- envía al servidor (2) localizaciones precedentes almacenadas en el dispositivo (1), si las hubiera.
15. Procedimiento según cualquiera de las reivindicaciones anteriores, donde cuando el dispositivo portátil (1) es encendido por su portador, se producen las siguientes etapas:
- se activan ambos módulos de posicionamiento AGPS (11) y de transmisión/recepción (12),
- el dispositivo (1) comienza a buscar cobertura GPS, y
- el dispositivo (1) informa de ello al servidor (2).
16. Procedimiento según cualquiera de las reivindicaciones anteriores, donde cuando el dispositivo portátil (1) obtiene cobertura GPS y tiene los módulos AGPS (11) y de transmisión/recepción (12) encendidos:
- informa de ello al servidor (2) y
- le envía su localización actual.
17. Procedimiento según la reivindicación 6, donde si el dispositivo portátil (1) pierde cobertura de la red de comunicaciones inalámbrica (3) y está en movimiento, el dispositivo (1):
- sigue calculando sus localizaciones a partir de dicha señal GPS (4) y de la información de asistencia GPS enviada, y
- almacena dichas localizaciones en una memoria (16) del dispositivo (1) para ser enviadas al servidor (2) cuando el dispositivo (1) haya recuperado dicha cobertura de la red de comunicaciones inalámbrica (3).
18. Procedimiento según cualquiera de las reivindicaciones anteriores, donde cada vez que el dispositivo (1) envía al servidor (2) cualquiera de las localizaciones obtenidas en el módulo de posicionamiento AGPS, incluye también el tiempo asociado a cada una de dichas localizaciones.
19. Procedimiento según cualquiera de las reivindicaciones anteriores, donde el servidor (2) está configurado para informar a un usuario (6) de la posición del dispositivo portátil (1).
20. Procedimiento según la reivindicación 19, donde el servidor (2) le envía a dicho usuario (6) la última posición obtenida por parte del dispositivo portátil (1).
21. Procedimiento según cualquiera de las reivindicaciones 19 ó 20, donde, si el dispositivo (1) está detenido, el servidor (2) envía al usuario (6) la última posición del dispositivo (1) que el servidor (2) tiene almacenada, donde dicha última posición ha sido enviada desde el dispositivo (1) al servidor (2) antes de hibernar los módulos de posicionamiento AGPS (11) y de transmisión/recepción (12).
22. Procedimiento según la reivindicación 21, donde si antes de detenerse, el dispositivo (1) tiene tanto cobertura GPS (8) como cobertura de la red de comunicaciones inalámbrica (5), se informa al usuario (6) de que la información de la localización enviada corresponde con la posición actual del dispositivo (1).
23. Procedimiento según la reivindicación 21, donde si antes de detenerse, el dispositivo (1) no tiene cobertura GPS (8), se informa al usuario (6) de que la información de la localización enviada puede no corresponder con la posición actual del dispositivo (1), en cuyo caso dicha información corresponde con la última posición que el dispositivo (1) fue capaz de calcular antes de perder la cobertura GPS (8).
24. Procedimiento según cualquiera de las reivindicaciones 19 ó 20, donde, si el dispositivo (1) está en movimiento pero ha perdido la cobertura GPS (8), el servidor (2) envía al usuario (6) la última posición del dispositivo (1) que el servidor (2) tiene almacenada, donde dicha última posición ha sido enviada desde el dispositivo (1) al servidor (2) antes de perder la cobertura GPS (8), y el servidor (2) informa al usuario (6) de que:
- la información de la localización enviada puede no corresponder con la posición actual del dispositivo (1), sino que corresponde con la última posición que el dispositivo (1) fue capaz de calcular antes de perder la cobertura GPS (8) y
- de que el dispositivo se encuentra buscando cobertura GPS.
25. Procedimiento según cualquiera de las reivindicaciones 19 ó 20, donde, si el dispositivo (1) está apagado, el servidor (2) envía al usuario (6) la última posición del dispositivo (1) que el servidor (2) tiene almacenada, y el servidor (2) informa al usuario (6) de que:
- la información de la localización enviada puede no corresponder con la posición actual del dispositivo (1),
- de que el dispositivo se encuentra apagado.
26. Procedimiento según cualquiera de las reivindicaciones 19 a 25, donde dicho usuario (6) recibe la posición del dispositivo portátil (1) por parte del servidor (2) como respuesta a una petición puntual iniciada por el usuario (6).
27. Procedimiento según cualquiera de las reivindicaciones 19 a 26, donde dicho usuario (6) recibe la posición del dispositivo portátil (1) por parte del servidor (2) periódicamente cada un cierto tiempo configurable en el sistema y en función de un acuerdo previamente establecido para el envío automático de localizaciones.
28. Procedimiento según cualquiera de las reivindicaciones 19 a 27, donde el usuario (6) recibe la posición del dispositivo portátil (1) de una forma que se elige de entre las siguientes: representada sobre un mapa cartográfico accesible desde un terminal fijo o desde un terminal móvil, representada en formato texto, o mediante un fichero de audio.
29. Procedimiento según cualquiera de las reivindicaciones 1 a 28, que comprende además el envío a un usuario (6) de al menos una alerta relacionada con el estado del dispositivo (1) portátil o del dispositivo de entorno de automoción (10).
30. Procedimiento según la reivindicación 2 9, donde dicha al menos una alerta se elige de entre el siguiente grupo de alertas: alerta de movimiento o antirrobo, alerta de zona, alerta de corte o fallo de alimentación, alerta de velocidad excesiva, alerta de batería baja y alerta de aviso de remolque de vehículo.
31. Procedimiento según la reivindicación 30, donde dicha alerta es una alerta de movimiento o antirrobo que se genera desde el servidor (2).
32. Procedimiento según la reivindicación 30, donde dicha alerta es una alerta de zona que permite configurar al menos un área geográfica y conocer en tiempo real la salida y entrada del dispositivo (1) en dicha área.
33. Procedimiento según la reivindicación 30, donde dicha alerta es una alerta de velocidad que se genera si el dispositivo (1) supera un umbral de velocidad previamente configurado.
34. Procedimiento según la reivindicación 30, donde dicha alerta es una alerta de batería que se genera si el nivel de la batería del dispositivo (1) pasa de estar por encima de un umbral previamente configurado a estar por debajo de dicho umbral.
35. Procedimiento según la reivindicación 30, donde dicha alerta es una alerta de corte de alimentación que se aplica al dispositivo para entorno de automoción (10) y que se genera si se interrumpe la alimentación del dispositivo (1) proporcionada por la batería del vehículo al que se conecta dicho dispositivo (1).
36. Procedimiento según la reivindicación 30, donde dicha alerta es una alerta de aviso de remolque de vehículo que se aplica al dispositivo para entorno de automoción (10) y que se genera desde el servidor (2) si la inclinación del vehículo, detectada por los medios sensores de movimiento (14), supera un umbral previamente establecido.
37. Procedimiento según cualquiera de las reivindicaciones 2 9 a 36, que comprende la etapa de, por parte del usuario (6), configurar el servicio y gestión de dichas alertas mediante acceso web desde de un ordenador, desde un terminal móvil o mediante acceso telefónico.
38. Procedimiento según la reivindicación 37, que comprende la etapa de enviar a un usuario (6) dicha alerta desde dicho servidor (2) mediante el envío de un SMS al móvil del usuario (6), mediante el envío de un e-mail a su dirección de correo electrónico o mediante una llamada de voz a su teléfono móvil o fijo.
39. Procedimiento según cualquiera de las reivindicaciones anteriores, que comprende además la etapa de identificar al conductor del vehículo que incorpora un dispositivo para entorno de automoción (10) a través de una etiqueta RFID portada por dicho conductor, siendo dicha etiqueta RFID detectada por un emisor-receptor RFID (53) conectado al dispositivo (1).
40. Procedimiento según cualquiera de las reivindicaciones anteriores, que comprende además la etapa de enviar un valor de gravedad medido desde dicho dispositivo (1) hacia dicho servidor (2).
41. Dispositivo portátil (1) que comprende:
- medios de posicionamiento global AGPS (11) configurados para recibir una señal GPS (4) desde una red de satélites GPS (8);
- medios de transmisión/recepción (12) configurados para conectarse a una red de comunicaciones inalámbrica (3) y recibir a través de la misma, procedentes de un servidor (2), al menos, información de asistencia GPS y peticiones de localización;
donde dicho dispositivo portátil (1) es capaz de calcular su posición a partir de dicha información de asistencia GPS (5) y de dicha señal GPS (4) y para enviar dicha posición hacia dicho servidor (2);
caracterizado por que
el dispositivo portátil (1) comprende medios sensores de movimiento (14) capaces de captar una información utilizable para hibernar o interrumpir la hibernación de dichos módulos de posicionamiento AGPS (11) y transmisión/recepción (12), en función de la ausencia o presencia de movimiento del dispositivo portátil (1) y capaces de captar una medida de la gravedad.
42. Dispositivo (1) según la reivindicación 41, donde dichos medios sensores de movimiento (14) comprenden un acelerómetro.
43. Dispositivo (1) según cualquiera de las reivindicaciones 41 ó 42, que comprende también un microprocesador (15) capaz de controlar dichos medios de posicionamiento AGPS (11), dichos medios de transmisión/recepción (12), dichos medios sensores de movimiento (14) y una memoria interna de almacenamiento (16). propia del dispositivo (1).
44. Dispositivo (1) según cualquiera de las reivindicaciones 41 a 43, que comprende además una batería (13).
45. Dispositivo (1) según cualquiera de las reivindicaciones 41 a 44, que comprende además una interfaz de acceso (17).
46. Dispositivo (1) según la reivindicación 45, donde dicha interfaz de acceso es un puerto USB (17).
47. Dispositivo (1) según cualquiera de las reivindicaciones 41 a 46, que comprende además medios visuales (17-1, 17-2, 17-3; 57-1, 57-2, 57-3) para indicar el estado de dicha batería (13), de dichos medios de posicionamiento AGPS (11) y de dichos medios de transmisión/recepción (12).
48. Dispositivo para un entorno de automoción (10) que comprende un dispositivo portátil (1, 1b) según cualquiera de las reivindicaciones 41 a 47, y un cable externo (19) configurado para conectarse al vehículo portador de dicho dispositivo para un entorno de automoción (10).
49. Dispositivo para un entorno de automoción (10) según la reivindicación 48, que está configurado para alimentarse a través de la batería interna (13) del dispositivo portátil (1, 1b) en caso de que se produzca un fallo en dicho cable externo (19), y para alimentarse a través de la batería del vehículo al que se conecta mediante dicho cable externo (19) en el resto de casos.
50. Dispositivo para un entorno de automoción (10) según cualquiera de las reivindicaciones 48 ó 49, donde dicho cable externo (19) comprende además una pluralidad de entradas y/o salidas, analógicas y/o digitales y al menos un puerto serie, adaptados para conectarse a otros sensores, dispositivos y/o puntos del vehículo a monitorizar.
51. Sistema de localización de un dispositivo portátil (1) que comprende:
- al menos un dispositivo portátil (1) según cualquiera de las reivindicaciones 41 a 47; y
- un servidor (2), configurado para comunicarse a través de un canal de datos (5) con dicho dispositivo portátil (1) a través de una red de comunicaciones inalámbrica (3) y para proporcionar automáticamente a dicho dispositivo portátil (1) información de asistencia GPS (5).
52. Sistema de localización que comprende:
- al menos un dispositivo para un entorno de automoción (10) según cualquiera de las reivindicaciones 48 a 50; y
- un servidor (2), configurado para comunicarse a través de un canal de datos (5) con dicho dispositivo para un entorno de automoción (10) a través de una red de comunicaciones inalámbrica (3) y para proporcionar automáticamente a dicho dispositivo (10) información de asistencia GPS (5).
53. Sistema según cualquiera de las reivindicaciones 51 ó 52, donde dicho servidor (2) comprende un sub-sistema de información de asistencia GPS (20), que a su vez comprende una base de datos capaz de almacenar la propia información de asistencia, encargado de las gestiones de obtención, tratamiento y envío de la información de asistencia GPS desde el servidor (2) hacia el dispositivo (1, 1b, 10).
54. Sistema según cualquiera de las reivindicaciones 51 a 53, donde dicho servidor (2) comprende además un sub-sistema de información geográfica (21) que a su vez comprende una base de datos cartográfica capaz de almacenar mapas, donde dicho sub-sistema de información geográfica (21) está configurado para gestionar acciones relacionadas con peticiones de cartografía, posicionamiento sobre dicha cartografía de la localización del dispositivo (1, 1b, 10), geocodificación y geocodificación inversa.
55. Sistema según cualquiera de las reivindicaciones 51 a 54, donde dicho servidor (2) comprende además un sub-sistema de gestión de usuario (22), que a su vez comprende una base de datos capaz de almacenar información asociada a los usuarios, donde dicho sub-sistema de gestión de usuario (22) está configurado para gestionar el alta, baja, permisos, privacidad, seguridad y preferencias temporales espaciales de los usuarios.
56. Sistema según cualquiera de las reivindicaciones 51 a 55, que comprende además un nodo externo (9) conectado al servidor (2) a través de una red de datos, para ayudar en la gestión de un servicio de comunicación de alertas desde el servidor (2).
57. Programa de ordenador que comprende medios de código de programa de ordenador adaptados para realizar las etapas del procedimiento de acuerdo con cualquiera de las reivindicaciones 1 a 40 cuando el mencionado programa se ejecuta en un ordenador, un procesador digital de la señal, un circuito integrado específico de la aplicación, un microprocesador, un microcontrolador o cualquier otra forma de hardware programable.
Patentes similares o relacionadas:
Método para potenciar la seguridad de navegación de un vehículo proporcionando al vehículo datos de navegación en tiempo real mediante una red de comunicaciones móviles, sistema para potenciar la seguridad de navegación de un vehículo proporcionando al vehículo datos de navegación en tiempo real mediante una red de comunicaciones móviles, programa y producto de programa informático, del 22 de Julio de 2020, de DEUTSCHE TELEKOM AG: Método para potenciar la seguridad de navegación de un vehículo proporcionando al vehículo datos de navegación en tiempo real mediante una red de comunicaciones […]
Servicios sensibles al contexto, del 24 de Junio de 2020, de Nokia Technologies OY: Un método que comprende: recibir, en un dispositivo inalámbrico , señales de sensor que caracterizan una o más condiciones ambientales, […]
Método y dispositivo para mejorar la determinación de la posición, del 27 de Mayo de 2020, de DEUTSCHE TELEKOM AG: Método para mejorar la determinación de la posición de un dispositivo de comunicación móvil, con las siguientes etapas de método: a) proporcionar una información […]
Localización de una baliza de emergencia, del 20 de Mayo de 2020, de THALES: Un procedimiento implementado por ordenador para procesar la señal transmitida por una baliza de emergencia, siendo recibida dicha señal por […]
Procedimientos y sistemas para la detección mejorada de mensajes de navegación electrónica, del 6 de Mayo de 2020, de exactEarth Ltd: Un procedimiento de generación y transmisión de una señal de sistema de identificación automática, AIS, que comprende un mensaje de navegación electrónica, comprendiendo […]
Procedimiento y aparato para admitir el posicionamiento de terminales en una red inalámbrica, del 4 de Diciembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento de comunicación inalámbrica, que comprende: intercambiar una pluralidad de mensajes de posicionamiento para […]
Crowdsourcing basado en la calidad del almanaque de estación base, del 20 de Noviembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento en un dispositivo móvil para informar sobre datos de crowdsourcing, con el procedimiento que comprende: recibir , desde un servidor de almanaque […]
Dispositivo y método para calcular estadísticas de golf, del 20 de Noviembre de 2019, de Skyhawke Technologies, LLC: Un dispositivo de reconocimiento de localización que comprende: un sensor de determinación de posición que determina una posición del dispositivo […]