Método y aparato para determinar la topografía y las propiedades ópticas de una superficie móvil.
Método para la determinación de la topografía de un objeto fotografiado que se desplaza,
en cuyo método:
- se toman por lo menos dos imágenes (KX1, KX2, KX3) en una zona (10) de formación de la imagen,aproximadamente de la misma zona objeto (X),
- la topografía o las propiedades ópticas de una superficie de la zona objeto (X) son determinadas en base a lasimágenes (KX1, KX2, KX3),
caracterizado porque
- por lo menos, se toman dos imágenes (KX1, KX2, KX3) en la zona (10) de formación de imágenes del área objeto(X), en instantes diferentes en el tiempo (t1, t2, t3), de tal modo que, en cada imagen (KX1, KX2, KX3) se dirigeniluminaciones de tipos esencialmente distintos entre sí a la zona objeto (X),
- además, se toman imágenes (KY1, KY2, KY3) en la zona de formación de imágenes (10) de una zona dereferencia (Y) cerca de la zona objeto (X), de forma sincronizada con las imágenes de la zona objeto (X), de talmanera que en cada imagen (KY1, KY2, KY3) de la zona de referencia (Y) se pretende una iluminación mutuaesencialmente del mismo tipo en la zona de referencia
- las imágenes creadas (KY1, KY2, KY3) de la zona de referencia (Y) son utilizadas para situar las zonas de imagencorrespondientes a la misma zona (X) del objeto de las imágenes (KX1, KX2, KX3) de la zona objeto (X).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08169222.
Solicitante: Teknologian tutkimuskeskus VTT.
Nacionalidad solicitante: Finlandia.
Dirección: Vuorimiehentie 3 02150 Espoo FINLANDIA.
Inventor/es: KERÄNEN,HEIMO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B41F33/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B41 IMPRENTA; MAQUINAS COMPONEDORAS DE LINEAS; MAQUINAS DE ESCRIBIR; SELLOS. › B41F MAQUINAS O PRENSAS DE IMPRIMIR (dispositivos para copiar en varios ejemplares o aparatos para impresión de oficina B41L). › Dispositivos indicadores, dispositivos de contado, de aviso, de control o de seguridad (disposición de los contadores sobre prensas de platina B41F 1/00, sobre prensas de cilindros B41F 3/84; dispositivos de alimentación o de medición de tinta B41F 31/02).
- G01B11/25 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › mediante la proyección de un patrón, p. ej.franjas de Moiré, sobre el objeto (G01B 11/255 tiene prioridad).
- G01N21/47 G01 […] › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 21/00 Investigación o análisis de los materiales por la utilización de medios ópticos, es decir, utilizando rayos infrarrojos, visibles o ultravioletas (G01N 3/00 - G01N 19/00 tienen prioridad). › Dispersión, es decir, reflexión difusa (G01N 21/25, G01N 21/41 tienen prioridad).
- G01N21/89 G01N 21/00 […] › en un material móvil, p. ej. del papel, de tejidos (G01N 21/90, G01N 21/91, G01N 21/94 tienen prioridad).
PDF original: ES-2388314_T3.pdf
Fragmento de la descripción:
Método y aparato para determinar la topografía y las propiedades ópticas de una superficie móvil.
La presente invención se refiere a un método, según el preámbulo de la reivindicación 1, para determinar las propiedades de una superficie móvil. Estas propiedades son topografía, propiedades reflectantes espectrales, propiedades de dispersión, color y propiedades de polarización.
La invención se refiere asimismo a un aparato previsto para la aplicación del método.
Según la técnica anterior, se puede realizar la medición de un mapa topográfico de una superficie utilizando una técnica con cámara, por ejemplo, utilizando un método estéreo con la ayuda de luz estructural, y utilizando diversas técnicas de cambio de fase. En estos métodos se toman habitualmente varias imágenes de la misma superficie, de tal modo que la forma de iluminación de la superficie es diferente en cada imagen. Cuando la forma de iluminación se selecciona de un modo específico, estas imágenes tomadas de modos distintos pueden ser utilizadas como una base para calcular la topografía de la superficie, así como para compensar el efecto de otros factores, por ejemplo la textura o el color de la superficie, en el resultado de los cálculos. En lo que se refiere a los métodos, es esencial que los mismos puntos en la superficie puedan ser identificados a partir de las imágenes tomadas de la superficie bajo diferentes tipos de iluminación. Esto es muy sencillo cuando la superficie no se desplaza, de manera que las imágenes iluminadas de modos diferentes se pueden tomar de forma consecutiva en el tiempo. De manera similar, las propiedades de dispersión de la superficie pueden ser medidas, por ejemplo, tomando varias imágenes de la superficie, en cada una de cuyas imágenes es distinta la forma geométrica de la iluminación, y mediante la comparación de estas imágenes entre sí.
Cuando la superficie se desplaza, es más difícil sacar partido de estos métodos. No se puede tomar dos veces la imagen del mismo punto sobre la superficie exactamente en la misma forma geométrica, manteniendo constante la forma geométrica de la medición. Una solución es tomar varias imágenes simultáneamente de la superficie utilizando colores diferentes. Esta técnica se da a conocer, por ejemplo, en el documento EP de la patente EP 97114590: Método y aparato para la inspección automática de superficies en movimiento. El problema de la toma de imágenes en color es que los colores de la superficie pueden distorsionar las mediciones topográficas y las propiedades de dispersión basadas en la medición del color.
Asimismo, los documentos EP-1170572 y DE-10063293 dan a conocer métodos para determinar la topografía o las propiedades ópticas de una superficie en movimiento.
Si se desea hacer que el aparato sea tan fiable como sea posible, se deben evitar los componentes mecánicos tales como los obturadores de las cámaras, etc.
La invención está prevista para eliminar los defectos de la técnica anterior descritos anteriormente, y con este propósito, crear un tipo totalmente nuevo de método y de aparato para determinar la topografía y las propiedades ópticas de una superficie en movimiento.
La invención se basa en la toma, por lo menos, de dos imágenes en instantes diferentes en el tiempo, tanto del objeto móvil como de una zona de referencia situada en su proximidad inmediata, de tal manera que, por ejemplo, iluminando el objeto mediante máscaras con dibujos, tales como una máscara con dibujos senoidales e iluminando la zona de referencia en las imágenes tomadas de la zona de referencia en las proximidades del objeto, a través de una máscara sin dibujos. Las imágenes de las zonas de referencia iluminadas a través de una máscara sin dibujos son utilizadas para localizar la posición en la zona de formación de la imagen, de las imágenes de las zonas iluminadas a través de las máscaras con dibujos, habitualmente utilizando una fotocélula, con respecto a las demás imágenes.
Según la invención se toman, por lo menos, dos imágenes del objeto en la zona de formación de la imagen, en instantes diferentes en el tiempo, de tal manera que en cada imagen el objeto está iluminado en modos mutuamente distintos, por ejemplo a través de máscaras, o partes de una máscara, de tipos diferentes, siendo tomadas las imágenes de la zona de referencia cerca del objeto, a la zona de formación de la imagen, en un instante en el tiempo sincronizado con las imágenes del objeto, de tal modo que la zona de referencia está iluminada mutuamente en estas imágenes, esencialmente del mismo modo, por ejemplo, a través de máscaras del mismo tipo, y las imágenes formadas de esta manera de la zona de referencia son utilizadas para localizar los píxeles correspondientes de las imágenes tomadas del objeto.
Más específicamente, el método según la invención se caracteriza por lo que se indica en la parte caracterizante de la reivindicación 1.
Por su parte, el aparato según la invención se caracteriza por lo que se indica en la parte caracterizante de la reivindicación 9.
Con la ayuda de la invención se consiguen ventajas considerables.
Con la ayuda de la invención, se puede utilizar una imagen de la zona de referencia iluminada a través de una máscara sin dibujos para localizar la posición en la zona de formación de la imagen, de una imagen de la zona iluminada a través de una máscara con dibujos, de tal manera que se pueden definir los píxeles correspondientes al objeto de la imagen tomada, iluminado a través de la máscara en instantes diferentes de la toma de imágenes.
Con la ayuda de esta nueva invención, se puede crear un nuevo método basado en una cámara, que permite obtener la topografía exacta de una superficie a medir de un objeto que se desplaza de una manera muy rápida, sin que la textura o el color de la superficie afecten al resultado de la medición.
La invención se puede aplicar asimismo a la medición del color, a las propiedades espectroscópicas, al brillo, a las propiedades de dispersión o a las propiedades de polarización de una superficie. Estas propiedades pueden ser medidas utilizando el mismo sistema de medición que el de la topografía de la superficie.
La invención puede ser utilizada para medir la topografía, por ejemplo, de una superficie de papel o de metal. Las realizaciones preferentes de la invención pueden ser utilizadas asimismo para determinar, por ejemplo, la altura de una huella impresa o la altura de un conductor en una placa de un circuito electrónico en una línea de fabricación que se mueve rápidamente.
Mediante el nuevo tipo de método, según la invención, es posible realizar la medición precisa de la topografía de la superficie de un objeto que se desplaza rápidamente. Las ventajas de la invención son pues:
• un dispositivo de construcción simple y económica
• aplicabilidad a una superficie que se desplaza a velocidades muy elevadas
• el método es independiente del color y de la textura superficial de la superficie.
El método puede ser utilizado asimismo para realizar la medición, por ejemplo, del color, del espectro de la longitud de onda o de las propiedades de polarización de una superficie que se desplaza.
A continuación se examina la invención con la ayuda de ejemplos y haciendo referencia a los dibujos adjuntos.
La figura 1 muestra, de forma esquemática, el principio general de un dispositivo para la toma de imágenes según la invención.
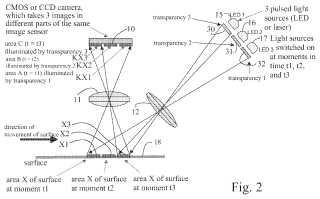
La figura 2 muestra, de forma esquemática, un dispositivo de toma de imágenes según la invención.
La figura 3 muestra el diagrama de tiempos del dispositivo de toma de imágenes según la figura 2.
La figura 4 muestra la utilización, en una situación de toma de imágenes de transparencias utilizadas para la iluminación, haciendo referencia a una realización preferente de la invención.
La figura 5 muestra la posición en una imagen de las zonas -X-e -Y-de una superficie, en instantes diferentes, en una solución según la invención.
La figura 6 muestra una situación, según la invención, en la que se toma tres veces la imagen de -Y-en los instantes -t1-, -t2-y -t3-, en zonas diferentes de la célula de la cámara.
Las figuras... [Seguir leyendo]
Reivindicaciones:
1. Método para la determinación de la topografía de un objeto fotografiado que se desplaza, en cuyo método:
- se toman por lo menos dos imágenes (KX1, KX2, KX3) en una zona (10) de formación de la imagen, aproximadamente de la misma zona objeto (X) ,
- la topografía o las propiedades ópticas de una superficie de la zona objeto (X) son determinadas en base a las imágenes (KX1, KX2, KX3) ,
caracterizado porque
- por lo menos, se toman dos imágenes (KX1, KX2, KX3) en la zona (10) de formación de imágenes del área objeto (X) , en instantes diferentes en el tiempo (t1, t2, t3) , de tal modo que, en cada imagen (KX1, KX2, KX3) se dirigen iluminaciones de tipos esencialmente distintos entre sí a la zona objeto (X) ,
- además, se toman imágenes (KY1, KY2, KY3) en la zona de formación de imágenes (10) de una zona de referencia (Y) cerca de la zona objeto (X) , de forma sincronizada con las imágenes de la zona objeto (X) , de tal manera que en cada imagen (KY1, KY2, KY3) de la zona de referencia (Y) se pretende una iluminación mutua esencialmente del mismo tipo en la zona de referencia
- las imágenes creadas (KY1, KY2, KY3) de la zona de referencia (Y) son utilizadas para situar las zonas de imagen correspondientes a la misma zona (X) del objeto de las imágenes (KX1, KX2, KX3) de la zona objeto (X) .
2. Método, según la reivindicación 1, caracterizado porque, en las imágenes tomadas de la zona (X) , dicha zona
(X) está iluminada por medio de iluminación estructural con dibujos de tipos diferentes, mutuamente, esencialmente en la misma dirección, y en las imágenes tomadas de la zona (Y) , dicha zona (Y) está iluminada mutuamente, esencialmente en la misma dirección, sin un dibujo de iluminación estructural.
3. Método, según la reivindicación 1, caracterizado porque, en las imágenes tomadas de la zona (X) , dicha zona
(X) está iluminada desde diferentes direcciones por medio de luz esencialmente del mismo color, y en las imágenes tomadas de la zona (Y) , dicha zona (Y) está iluminada mutuamente, esencialmente en la misma dirección, mediante luz mutuamente, esencialmente, del mismo color.
4. Método, según la reivindicación 1, caracterizado porque, en las imágenes tomadas de la zona (X) , dicha zona
(X) está iluminada por medio de luz que está polarizada en direcciones mutuamente diferentes, y en las imágenes tomadas de la zona (Y) , dicha zona (Y) está iluminada mediante luz que está polarizada mutuamente del mismo modo.
5. Método, según la reivindicación 1, caracterizado porque, en las imágenes tomadas de la zona (X) , dicha zona
(X) está iluminada por medio de luz de tipos mutuamente espectralmente diferentes, y en las imágenes tomadas de la zona (Y) , dicha zona (Y) está iluminada mediante luz mutuamente espectralmente del mismo tipo.
6. Método, según la reivindicación 1, caracterizado porque, en las imágenes tomadas de la zona (X) , dicha zona
(X) está iluminada, esencialmente, mutuamente desde la misma dirección, mediante dibujos de iluminación en forma senoidal en una fase diferente, y en las imágenes tomadas de la zona (Y) , dicha zona (Y) está iluminada sin una iluminación estructural con dibujos.
7. Método, según cualquiera de las reivindicaciones anteriores, caracterizado porque, se utiliza una única célula
(10) de formación de imágenes como la zona de formación de imágenes.
8. Método, según cualquiera de las reivindicaciones anteriores, caracterizado porque, se utiliza una estructura de células formada por varias cámaras independientes como la zona de formación de imágenes.
9. Aparato, para la determinación de la topografía o las propiedades ópticas de un objeto móvil, comprendiendo dicho aparato
- medios para tomar, por lo menos, dos imágenes (KX1, KX2, KX3) en una zona (10) de formación de imágenes, aproximadamente de la misma zona objeto (X) ,
- medios para determinar la topografía o las propiedades ópticas de la zona objeto (X) a partir de las imágenes (KX1, KX2, KX3) ,
caracterizado porque, comprende
- medios para tomar, por lo menos, dos imágenes (KX1, KX2, KX3) en la zona (10) de formación de imágenes de la zona objeto (X) , en instantes (t1, t2, t3) diferentes en el tiempo, de tal modo que, en cada imagen (KX1, KX2, KX3) se pretenden iluminaciones de tipos esencialmente diferentes entre sí en la zona objeto (X) ,
- medios para tomar asimismo una imagen, en la zona (10) de formación de la imagen, de una zona (Y) de referencia cerca de la zona objeto (X) , de forma sincronizada con las imágenes de la zona objeto (X) , de tal modo que, en cada imagen (KY1, KY2, KY3) de la zona de referencia (Y) se pretende una iluminación esencialmente del mismo tipo entre ellas, en la zona de referencia (Y) ,
- medios para la utilización de las imágenes (KY1, KY2, KY3) creadas de la zona de referencia (Y) para situar las zonas de imagen correspondientes a la misma zona (X) del objeto en las imágenes (KX1, KX2, KX3) de la zona objeto (X) .
10. Aparato, según la reivindicación 9, caracterizado porque, comprende medios para iluminar la zona (X) de las imágenes a tomar de la zona (X) mediante dibujos de iluminación estructural de diferentes tipos, esencialmente desde la misma dirección, y para iluminar la zona (Y) de las imágenes a tomar de la zona (Y) esencialmente desde la misma dirección, sin un dibujo de iluminación estructural.
11. Aparato, según la reivindicación 9, caracterizado porque, comprende medios para iluminar la zona (X) de las imágenes a tomar de la zona (X) desde direcciones diferentes, con luz esencialmente del mismo color, y para iluminar la zona (Y) de las imágenes a tomar de la zona (Y) , esencialmente desde la misma dirección y con luz esencialmente del mismo color.
12. Aparato, según la reivindicación 9, caracterizado porque, comprende medios para iluminar la zona (X) de las imágenes a tomar de la zona (X) con luz polarizada en diferentes modos y para iluminar la zona (Y) de las imágenes a tomar de la zona (Y) con luz polarizada, esencialmente del mismo modo.
13. Aparato, según la reivindicación 9, caracterizado porque, comprende medios para iluminar la zona (X) de las imágenes a tomar de la zona (X) con luz de tipos, espectralmente mutuamente diferentes, y para iluminar la zona (Y) de las imágenes a tomar de la zona (Y) mutuamente con luz espectralmente del mismo tipo.
14. Aparato, según la reivindicación 9, caracterizado porque, comprende medios para iluminar la zona (X) de las imágenes a tomar de la zona (X) con dibujos de iluminación en forma senoidal en una fase diferente y para iluminar la zona (Y) de las imágenes a tomar de la zona (Y) sin un dibujo de iluminación estructural.
15. Aparato, según cualquiera de las reivindicaciones anteriores, caracterizado porque, la zona de formación de imágenes es una única célula unificada (10) de toma de imágenes.
16. Aparato, según cualquiera de las reivindicaciones anteriores, caracterizado porque, la zona de formación de imágenes está formada por una estructura de células formada por varias cámaras independientes.
Patentes similares o relacionadas:
Aparato de impresión de latas, del 29 de Abril de 2020, de I. Mer Co., Ltd: Aparato de impresión de latas que comprende: una impresora principal que tiene múltiples cilindros de placa para la impresión de diferentes colores y la […]
Estación de control de calidad con sistema de calibración de cámara para máquina procesadora de elementos laminados, del 22 de Abril de 2020, de BOBST MEX SA: Una estación de control de calidad para una máquina procesadora de elementos laminados, que tiene al menos una cámara dispuesta […]
Dispositivo y método para limpiar una cuchilla tangente en una unidad de impresión de una máquina de impresión de huecograbado, del 8 de Abril de 2020, de Bobst Group Italia S.p.A: Dispositivo para limpiar una cuchilla tangente en una unidad de impresión tal como una máquina de impresión de huecograbado, comprendiendo la unidad de impresión […]
Procedimiento y dispositivo de mando para operar una máquina impresora, del 8 de Abril de 2020, de manroland Goss web systems GmbH: Procedimiento para operar una máquina impresora, a saber, para imprimir un soporte de impresión en unidades de impresión de la máquina impresora, comprendiendo […]
Un dispositivo y un método para calentar un rodillo anilox por inducción en máquinas de impresión, del 26 de Febrero de 2020, de Bobst Firenze S.r.l: Un sistema para controlar la temperatura de un rodillo anilox en una unidad de impresión, estando hecho el rodillo anilox de un material ferromagnético […]
Procedimiento para corregir la desalineación de impresión en un aparato de impresión, del 22 de Enero de 2020, de I. Mer Co., Ltd: Un procedimiento para corregir la desalineación de impresión en un aparato de impresión , comprendiendo el aparato de impresión : una impresora con […]
Aparato de agua humectante de para máquinas de impresión y una máquina de impresión equipada con el mismo, del 8 de Enero de 2020, de I. Mer Co., Ltd: Una impresora proporcionada con aparato humectante , siendo que el aparato humectante comprende: un rodillo que empalma con un cilindro de placa ; uno o más […]
Método para impresión en continuo de elementos identificativos certificados sobre una banda, del 18 de Diciembre de 2019, de COMEXI GROUP INDUSTRIES, SAU: Método para impresión en continuo de elementos identificativos certificados sobre una banda, en el que dichos elementos identificativos son todos ellos distintos y generados […]