Máquina quirúrgica.
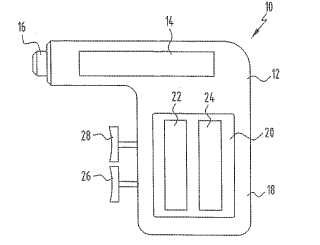
Máquina quirúrgica (10) con un motor eléctrico (14), que presenta un rotor y al menos dos devanados del motor,
y con un control del motor (24) para controlar y/o regular el motor eléctrico (14), estando subdividido el intervalo de velocidades de rotación global (30, 32) de la máquina quirúrgica (10) en al menos un intervalo de velocidades de rotación inferior (30) para velocidades de rotación bajas y en al menos un intervalo de velocidades de rotación superior (32) para velocidades de rotación más elevadas que el al menos un intervalo de velocidades de rotación inferior (30), estando realizado el control del motor (24) de tal modo que en el al menos un intervalo de velocidades de rotación inferior (30) puede ejecutarse un primer procedimiento de control y/o regulación (A) para controlar y/o regular el motor eléctrico (14), caracterizada porque en el al menos un intervalo de velocidades de rotación superior (32) puede ejecutarse un segundo procedimiento de control y/o regulación (B) para controlar y/o regular el motor eléctrico (14) y porque el primer procedimiento de control y/o regulación (A) es un procedimiento de modulación de duración de impulsos por vectores espaciales (SVPWM), en el que todos los devanados del motor se alimentan de corriente eléctrica simultáneamente.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2005/007760.
Solicitante: AESCULAP AG.
Nacionalidad solicitante: Alemania.
Dirección: AM AESCULAP-PLATZ 78532 TUTTLINGEN ALEMANIA.
Inventor/es: SCHNEIDER, JURGEN, HOGERLE,ROLAND,ALOIS, KONRATH,Harald.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/16 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Osteotomos; Taladros o cizallas para huesos; Trépanos.
- H02P6/24 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 6/00 Disposiciones para el control de motores síncronos u otros motores dinamoeléctricos mediante conmutación electrónica en función de la posición del rotor; Conmutadores electrónicos a este fin (control vectorial H02P 21/00). › Disposiciones para la parada.
PDF original: ES-2383756_T3.pdf
Fragmento de la descripción:
Máquina quirúrgica La presente invención se refiere a una máquina quirúrgica con un motor eléctrico, que presenta un rotor y al menos dos devanados del motor, y con un control del motor para controlar y/o regular el motor eléctrico, estando subdividido el intervalo de velocidades de rotación global de la máquina quirúrgica en al menos un intervalo de velocidades de rotación inferior para velocidades de rotación bajas y en al menos un intervalo de velocidades de rotación superior para velocidades de rotación más elevadas que el al menos un intervalo de velocidades de rotación inferior, estando realizado el control del motor de tal modo que en el al menos un intervalo de velocidades de rotación inferior puede ejecutarse un primer procedimiento de control y/o regulación para controlar y/o regular el motor eléctrico.
Además, la presente invención se refiere a un procedimiento para hacer funcionar una máquina quirúrgica con un motor eléctrico, que presenta un rotor y al menos dos devanados del motor, y con un control del motor para controlar y/o regular el motor eléctrico, subdividiéndose el intervalo de velocidades de rotación global de la máquina quirúrgica en al menos un intervalo de velocidades de rotación inferior para velocidades de rotación bajas y en al menos un intervalo de velocidades de rotación superior para velocidades de rotación más elevadas que el al menos un intervalo de velocidades de rotación inferior, ejecutándose en el al menos un intervalo de velocidades de rotación inferior un primer procedimiento de control y/o regulación para controlar y/o regular el motor eléctrico.
Se conocen numerosas variantes de máquinas quirúrgicas del tipo indicado al principio, en particular como máquinas de taladrar y fresar o sierras.
Se hacen funcionar generándose con el control del motor señales de control para el motor eléctrico para hacerlo funcionar a una velocidad de rotación determinada. Según el tipo de motor eléctrico pueden alcanzarse velocidades de rotación de hasta 70.000 revoluciones por minuto. No obstante, debido al tipo de la construcción, el rendimiento de los motores eléctricos no es igual a todas las velocidades de rotación, en particular, no es siempre óptimo.
Una máquina quirúrgica del tipo indicado al principio se conoce por ejemplo por el documento US 5, 268, 622. En el documento WO 96/01521 A1 se da a conocer un procedimiento para motores de corriente continua sin escobillas.
Por lo tanto, la presente invención tiene el objetivo de mejorar una máquina quirúrgica y un procedimiento para hacer funcionar una máquina quirúrgica de tal modo que pueda optimizarse, en particular, un rendimiento del motor eléctrico, sustancialmente en todo el intervalo de velocidades de rotación.
Este objetivo se consigue en una máquina quirúrgica del tipo descrito al principio según la invención porque en el al menos un intervalo de velocidades de rotación superior puede ejecutarse un segundo procedimiento de control y/o regulación para controlar y/o regular el motor eléctrico y porque el primer procedimiento de control y/o regulación es un procedimiento de modulación de duración de impulsos por vectores espaciales (SVPWM) , en el que todos los devanados del motor se alimentan de corriente eléctrica simultáneamente.
La variante según la invención de máquinas quirúrgicas conocidas tiene la ventaja de que pueden aplicarse respectivamente procedimientos de control y/o regulación adaptados a un intervalo de velocidades de rotación del motor eléctrico. En particular, sería concebible que se definan más de dos intervalos de velocidades de rotación, conmutándose respectivamente al cambiarse de un intervalo de velocidades de rotación a otro también el procedimiento de control y/o regulación respectivamente aplicado. De este modo no sólo puede optimizarse el rendimiento del motor eléctrico en el servicio, sino que también puede determinarse de forma optimizada la velocidad de rotación real del motor eléctrico durante el servicio en función de la velocidad de rotación. En comparación con los procedimientos de modulación de duración de impulsos (PMW) convencionales, el procedimiento SVPWM tiene la ventaja de que todos los devanados del motor puedan alimentarse de corriente eléctrica simultáneamente, de modo que incluso a velocidades de rotación especialmente bajas es posible un servicio suave, exento de sacudidas del motor eléctrico. Además, un arranque del motor desde la parada mejora sustancialmente porque todos los devanados del motor pueden alimentarse de corriente eléctrica simultáneamente.
Es ventajoso que el primero y/o el segundo procedimiento de control y/o regulación sea un procedimiento de modulación de duración de impulsos (PMW) . Con este procedimiento, en particular los motores de corriente continua pueden hacerse funcionar de forma sencilla y optimizada. En particular, pueden generarse curvas de corriente y tensión sinusoidales mediante la superposición de señales digitales de tensión o corriente con una frecuencia portadora.
La máquina es especialmente económica y requiere poco mantenimiento si el motor eléctrico es un motor de corriente continua sin escobillas.
El motor eléctrico es preferiblemente un motor eléctrico sin sensores. Por ello ha de entenderse que no están previstos ni dispuestos en el motor eléctrico ningunos sensores para la detección de la velocidad de rotación para determinar una velocidad de rotación real del motor eléctrico. Los motores eléctricos de este tipo son sustancialmente más económicos que los motores que comprenden sensores y, además, se simplifica la estructura de la máquina quirúrgica en conjunto. El motivo es que deben preverse menos conexiones para el motor. Esto tiene además la ventaja de que en una máquina quirúrgica desmontable no pueden producirse problemas de corrosión en contactos mediante los cuales puede establecerse una conexión entre el control del motor y los sensores de detección de la velocidad de rotación y/o sensores de posición. Los contactos de este tipo se solicitan habitualmente con pequeñas tensiones o corrientes, de modo que incluso una corrosión pequeña de los contactos puede conducir a errores en la determinación de la velocidad de rotación real del motor eléctrico. Precisamente esto no puede ocurrir en una máquina según la invención.
Como alternativa, puede estar previsto de forma ventajosa que el motor presente sensores para la detección de la velocidad de rotación y que el control del motor esté realizado de tal modo que el primer procedimiento de control y/o regulación sea un procedimiento para controlar y/o regular la máquina quirúrgica, en el que el control del motor pone a disposición señales de control para el motor eléctrico en función de una velocidad de rotación real determinada con los sensores para la detección de la velocidad de rotación. Los sensores para la detección de la velocidad de rotación también pueden servir para determinar una posición del rotor del motor eléctrico. El uso de los sensores para la detección de la velocidad de rotación en particular para las velocidades de rotación bajas del motor eléctrico tiene la ventaja de que la velocidad de rotación puede determinarse de forma sustancialmente más exacta que por ejemplo mediante la determinación de una fuerza contraelectromotriz generada en el o los devanados del motor. La determinación de la fuerza contraelectromotriz es más adecuada, en particular, en caso de velocidades de rotación más elevadas, puesto que en este caso se generan tensiones de inducción más elevadas pudiendo procesarse de este modo mejor las señales determinadas.
Una estructura especialmente sencilla de la máquina resulta si está previsto un sistema Hall para la detección de una velocidad de rotación real del motor eléctrico y si el sistema Hall comprende los sensores para la detección de la velocidad de rotación. Los sensores Hall como sensores para la detección de la velocidad de rotación pueden estar realizados de forma especialmente pequeña y pueden integrarse directamente en el motor eléctrico.
Según una forma de realización preferible de la invención puede estar previsto que sea invariable un valor límite de la velocidad de rotación entre el al menos un intervalo de velocidades de rotación inferior y el al menos un intervalo de velocidades de rotación superior. En este caso, una conmutación entre los al menos dos procedimientos de control y/o regulación puede tener lugar siempre al alcanzarse un valor límite de la velocidad de rotación deseado.
Reivindicaciones:
1. Máquina quirúrgica (10) con un motor eléctrico (14) , que presenta un rotor y al menos dos devanados del motor, y con un control del motor (24) para controlar y/o regular el motor eléctrico (14) , estando subdividido el intervalo de velocidades de rotación global (30, 32) de la máquina quirúrgica (10) en al menos un intervalo de velocidades de rotación inferior (30) para velocidades de rotación bajas y en al menos un intervalo de velocidades de rotación superior (32) para velocidades de rotación más elevadas que el al menos un intervalo de velocidades de rotación inferior (30) , estando realizado el control del motor (24) de tal modo que en el al menos un intervalo de velocidades de rotación inferior (30) puede ejecutarse un primer procedimiento de control y/o regulación (A) para controlar y/o regular el motor eléctrico (14) , caracterizada porque en el al menos un intervalo de velocidades de rotación superior (32) puede ejecutarse un segundo procedimiento de control y/o regulación (B) para controlar y/o regular el motor eléctrico (14) y porque el primer procedimiento de control y/o regulación (A) es un procedimiento de modulación de duración de impulsos por vectores espaciales (SVPWM) , en el que todos los devanados del motor se alimentan de corriente eléctrica simultáneamente.
2. Máquina según la reivindicación 1, caracterizada porque el primero y/o el segundo procedimiento de control y/o regulación (A, B) es un procedimiento de modulación de duración de impulsos (PWM) .
3. Máquina según una de las reivindicaciones anteriores, caracterizada porque el motor eléctrico (14) es un motor de corriente continua sin escobillas.
4. Máquina según una de las reivindicaciones anteriores, caracterizada porque el motor eléctrico (14) es un motor eléctrico sin sensores.
5. Máquina según una de las reivindicaciones 1 a 3, caracterizada porque el motor eléctrico (14) presenta sensores para la detección de la velocidad de rotación y porque el control del motor (24) está realizado de tal modo que el primer procedimiento de control y/o regulación (A) es un procedimiento para controlar y/o regular la máquina quirúrgica (10) , en el que el control del motor (24) pone a disposición señales de control para el motor eléctrico (14) en función de una velocidad de rotación real determinada con los sensores para la detección de la velocidad de rotación.
6. Máquina según la reivindicación 5, caracterizada porque está previsto un sistema Hall para la detección de una velocidad de rotación real del motor eléctrico (14) y porque el sistema Hall comprende los sensores para la detección de la velocidad de rotación.
7. Máquina según una de las reivindicaciones anteriores, caracterizada porque es invariable un valor límite de la velocidad de rotación (Dlímite1, Dlímite2) entre el al menos un intervalo de velocidades de rotación inferior y el al menos un intervalo de velocidades de rotación superior (30, 32) .
8. Máquina según una de las reivindicaciones 1 a 6, caracterizada porque es variable un valor límite de la velocidad de rotación (Dlímite1, Dlímite2) entre el al menos un intervalo de velocidades de rotación inferior y el al menos un intervalo de velocidades de rotación superior (30, 32) .
9. Máquina según una de las reivindicaciones anteriores, caracterizada porque el control del motor (24) está realizado de tal modo que una conmutación del primer procedimiento de control y/o regulación (A) al segundo procedimiento de control y/o regulación (B) tiene lugar al alcanzarse una primera velocidad de rotación de conmutación (Dlímite1) y que una conmutación del segundo procedimiento de control y/o regulación (B) al primer procedimiento de control y/o regulación (A) tiene lugar al alcanzarse una segunda velocidad de rotación de conmutación (Dlímite2) .
10. Máquina según la reivindicación 9, caracterizada porque la primera velocidad de rotación de conmutación (Dlímite1) es igual o superior a la segunda velocidad de rotación de conmutación (Dlímite2) .
11. Máquina según una de las reivindicaciones anteriores, caracterizada porque el control del motor (24) está realizado de tal modo que la conmutación del primer procedimiento de control y/o regulación (A) al segundo procedimiento de control y/o regulación (B) tiene lugar automáticamente en el momento de la transición del al menos un intervalo de velocidades de rotación inferior al por lomenos un intervalo de velocidades de rotación superior (30, 32) y viceversa.
12. Máquina según una de las reivindicaciones anteriores, caracterizada porque el motor eléctrico (14) presenta tres devanados del motor.
13. Procedimiento para hacer funcionar una máquina quirúrgica con un motor eléctrico, que presenta un rotor y al menos dos devanados del motor, y con un control del motor para controlar y/o regular el motor eléctrico, subdividiéndose el intervalo de velocidades de rotación global de la máquina quirúrgica en al menos un intervalo de velocidades de rotación inferior para velocidades de rotación bajas y en al menos un intervalo de velocidades de rotación superior para velocidades de rotación más elevadas que en el al menos un intervalo de velocidades de rotación inferior, ejecutándose en el al menos un intervalo de velocidades de rotación inferior un primer
procedimiento de control y/o regulación para controlar y/o regular el motor eléctrico, caracterizado porque en el al menos un intervalo de velocidades de rotación superior se ejecuta un segundo procedimiento de control y/o regulación para controlar y/o regular el motor eléctrico y porque el primer procedimiento de control y/o regulación es un procedimiento de modulación de duración de impulsos por vectores espaciales (SVPWM) , en el que todos los devanados del motor se alimentan de corriente eléctrica simultáneamente.
14. Procedimiento según la reivindicación 13, caracterizado porque el primero y/o el segundo procedimiento de control y/o regulación son procedimientos de modulación de duración de impulsos (PWM) .
15. Procedimiento según la reivindicación 13 ó 14, caracterizado porque se usa un motor eléctrico que es un motor de corriente continua sin escobillas.
16. Procedimiento según una de las reivindicaciones 13 a 15, caracterizado porque se usa un motor eléctrico que es un motor eléctrico sin sensores.
17. Procedimiento según una de las reivindicaciones 13 a 16, caracterizado porque el motor presenta sensores para la detección de la velocidad de rotación y porque el primer procedimiento de control y/o regulación es un procedimiento para controlar y/o regular la máquina quirúrgica, en el que el control del motor pone a disposición señales de control para el motor eléctrico en función de una velocidad de rotación real determinada con los sensores para la detección de la velocidad de rotación.
18. Procedimiento según la reivindicación 17, caracterizado porque está previsto un sistema Hall para la detección de una velocidad de rotación real del motor eléctrico y porque el sistema Hall comprende los sensores para la detección de la velocidad de rotación.
19. Procedimiento según una de las reivindicaciones 13 a 18, caracterizado porque un valor límite de la velocidad de rotación entre el al menos un intervalo de velocidades de rotación inferior y el al menos un intervalo de velocidades de rotación superior permanece invariable durante el servicio de la máquina.
20. Procedimiento según una de las reivindicaciones 13 a 18, caracterizado porque un valor límite de la velocidad de rotación entre el al menos un intervalo de velocidades de rotación inferior y el al menos un intervalo de velocidades de rotación superior varía durante el servicio de la máquina.
21. Procedimiento según una de las reivindicaciones 13 a 20, caracterizado porque tiene lugar una conmutación del primer procedimiento de control y/o regulación al segundo procedimiento de control y/o regulación al alcanzarse una primera velocidad de rotación de conmutación y porque tiene lugar una conmutación del segundo procedimiento de control y/o regulación al primer procedimiento de control y/o regulación al alcanzarse una segunda velocidad de rotación de conmutación.
22. Procedimiento según la reivindicación 21, caracterizado porque la primera velocidad de rotación de conmutación es igual o superior a la segunda velocidad de rotación de conmutación.
23. Procedimiento según una de las reivindicaciones 13 a 22, caracterizado porque la conmutación del primer procedimiento de control y/o regulación al segundo procedimiento de control y/o regulación tiene lugar de forma automática en el momento de la transición del al menos un intervalo de velocidades de rotación inferior al por lomenos un intervalo de velocidades de rotación superior o viceversa.
24. Procedimiento según una de las reivindicaciones 13 a 23, caracterizado porque se usa un motor eléctrico con tres devanados del motor.
Patentes similares o relacionadas:
Mango médico con acoplamiento de seguridad neumático, del 22 de Julio de 2020, de AESCULAP AG: Mango médico para instrumentos médicos accionados hidráulica o neumáticamente con una parte de acoplamiento por el lado del mango para […]
Instrumento quirúrgico de mano, y una herramienta y un dispositivo de protección, del 15 de Julio de 2020, de Zastrow, Frank: Dispositivo quirúrgico dental de mano con una herramienta móvil , en donde se forma una zona de trabajo en un extremo distal de la herramienta y en donde […]
Sistema para preparar la tibia de un paciente en un procedimiento de reemplazo de articulación ortopédica, del 15 de Julio de 2020, de DePuy Ireland Unlimited Company: Un sistema de instrumentos quirúrgicos ortopédicos que comprende: un escariador quirúrgico que incluye un eje alargado y una pluralidad de estrías de […]
Herramienta de autoinjerto con un perfil acanalado mejorado y procedimientos de uso, del 1 de Julio de 2020, de HUWAIS IP HOLDING LLC: Un osteótomo giratorio , que comprende: una espiga que establece un eje longitudinal de rotación; un cuerpo que se extiende desde dicha espiga […]
Aparato para biopsia y aspiración de médula ósea, del 10 de Junio de 2020, de Teleflex Medical Devices S.à.r.l: Un conjunto acoplador que puede hacerse funcionar para enganchar de manera liberable un extremo de un árbol de accionamiento que se extiende […]
Sistema de lubricación y escape para un instrumento quirúrgico motorizado, del 13 de Mayo de 2020, de MEDTRONIC XOMED, INC.: Un sistema de lubricación para instrumentos quirúrgicos que comprende: un cartucho de lubricación ; un vástago que define una trayectoria primaria […]
Instrumento quirúrgico ortopédico, del 13 de Mayo de 2020, de DePuy Ireland Unlimited Company: Un montaje de instrumento quirúrgico ortopédico para preparar el fémur de un paciente en un procedimiento de reemplazo de rodilla, que comprende: […]
Fresa quirúrgica con depresiones no emparejadas, del 13 de Mayo de 2020, de MEDTRONIC PS MEDICAL, INC: Una herramienta de diseccion quirurgica para cortar hueso y otros tejidos, que comprende: - un vastago ; y - un cabezal de corte que se […]