DISPOSITIVO PARA CONTROLAR LA POSICIÓN DE UNA HERRAMIENTA O UN ELEMENTO DE MÁQUINA.
Dispositivo para controlar la posición de una herramienta (4) o un elemento (30) de máquina junto a o en un husillo (1) de trabajo o un dispositivo (27) de sujeción de herramienta,
en especial en una máquina de mecanizado, caracterizado porque el husillo (1) de trabajo o el dispositivo (27) de sujeción de herramienta presenta al menos un canal (5, 6, 7; 35, 36) que define una guía de ondas que es adecuada para la propagación de ondas electromagnéticas y que conduce de una superficie exterior del husillo (1) de trabajo o del dispositivo (27) de sujeción de herramienta hasta la herramienta (4) o el elemento (30) de máquina y porque está previsto al menos un sistema (11; 37) de radar y está dispuesto por fuera del husillo (1) de trabajo o del dispositivo (27) de sujeción de herramienta de modo que es capaz de irradiar una señal de radar a partir de la superficie exterior hacia el canal (5, 6, 7; 35, 36) y recibir una señal de radar reflectada desde el canal (5, 6, 7; 35, 36), y porque el sistema (11; 37) de radar está unido con un dispositivo (18, 19, 20; 26) de procesamiento de señales que por medio de al menos una señal de radar irradiada hacia el canal (5, 6, 7; 35, 36) y reflectada desde el canal (5, 6, 7; 35, 36) determina una medida para la posición de la herramienta (4) o del elemento (30) de máquina respecto al husillo (1) de trabajo o al dispositivo (27) de sujeción de herramienta.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09179089.
B23Q1/70TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 1/00 Elementos componentes de la estructura general de un tipo de máquina, y más especialmente los elementos fijos más grandes (B23Q 37/00 tiene prioridad). › Elementos fijos o móviles, mandriles de trabajo para la fijación de herramientas o piezas (cabezales o elementos similares, soportes para husillos de trabajo B23B 19/00; husillos de trabajo B23B 19/02).
B23Q17/00C2
Clasificación PCT:
B23Q1/70B23Q 1/00 […] › Elementos fijos o móviles, mandriles de trabajo para la fijación de herramientas o piezas (cabezales o elementos similares, soportes para husillos de trabajo B23B 19/00; husillos de trabajo B23B 19/02).
B23Q17/00B23Q […] › Dispositivos para indicar o medir sobre las máquinas herramientas (para el control automático o la regulación del movimiento de avance, de la velocidad de corte o de la posición de la herramienta o de la pieza B23Q 15/00).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
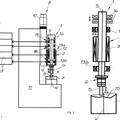
Dispositivo para controlar la posición de una herramienta o un elemento de máquina La invención se refiere a un dispositivo para controlar la posición de una herramienta o de un elemento de máquina según el preámbulo de la reivindicación 1. En el caso de las máquinas herramienta, los contaminantes en las superficies de apoyo de la herramienta pueden provocar una sujeción subóptima de la herramienta. Los contaminantes pueden ser en especial virutas de material que se producen forzosamente durante el mecanizado de una pieza de trabajo. Por consiguiente, una posición inclinada o un desplazamiento axial de la herramienta pueden originar un mecanizado deficiente. Este efecto se intensifica al usarse herramientas largas. Para mejorar la calidad de fabricación y reducir el porcentaje de piezas defectuosas se desea poder detectar la realización de una sujeción incorrecta de la herramienta antes de iniciarse el mecanizado. Por tanto, ya se ha propuesto comprobar la calidad de la sujeción de la herramienta en máquinas herramienta mediante un control del contacto plano de la herramienta. Asimismo, en las máquinas herramienta es necesario controlar las posiciones de distintos elementos de máquina. Un ejemplo de esto es el accionamiento para activar el dispositivo de sujeción de herramienta. Una medición de la posición en un elemento de este accionamiento es adecuado para suministrar información sobre si se han ejecutado o no correctamente las instrucciones de regulación del control de la máquina para liberar o sujetar una herramienta. El documento DE10351347A1 describe el control de las fuerzas generadas en el dispositivo de sujeción de una máquina herramienta mediante un sistema sensor sensible a la presión, la tensión o la fuerza. El objetivo perseguido en este caso es el control simultáneo de la sujeción correcta de la herramienta y de las fuerzas generadas durante el mecanizado para poder optimizar parámetros de proceso en el mecanizado. Con este fin, los sensores han de estar integrados en el dispositivo de sujeción de modo que queden ubicados en el flujo de fuerza que se produce durante el mecanizado. El documento DE19959778A1 instruye sobre el uso de un sistema de telemetría con sistema sensor de medición de distancia para el control simultáneo del estado de sujeción y del contacto plano del alojamiento de herramienta en el husillo. El documento, sin embargo, no contiene información detallada sobre la configuración del sistema sensor y de la unidad de telemetría. El documento DE19903183A1 describe un dispositivo de medición de distancia de alta frecuencia con una antena configurada como sensor y una guía de ondas abierta en un lado, cuyo lado abierto está cerrado con un elemento de amortiguamiento. Un objeto reflectante, cuya posición se debe determinar, se encuentra cerca del elemento de amortiguamiento. La frecuencia de emisión del oscilador se regula de modo que la disposición está en resonancia. La frecuencia de resonancia es una medida de la distancia del objeto reflectante respecto al elemento de amortiguamiento. Se proponen distintas aplicaciones, en las que el sensor de distancia está instalado siempre en el interior de un dispositivo mecánico, en el que se debe realizar una medición de distancia en uno de sus componentes. El objetivo de la invención es crear una solución nueva y conveniente, que se pueda realizar de forma simple y económica, para controlar la posición de una herramienta o un elemento de máquina junto a o en un husillo de trabajo o un dispositivo de sujeción de herramienta, en especial en una máquina de mecanizado. Este objetivo se consigue según la invención mediante un dispositivo con las características de la reivindicación 1. En las reivindicaciones secundarias aparecen configuraciones ventajosas. La invención prevé una detección de la posición de la herramienta o del elemento de máquina de interés mediante la irradiación de ondas electromagnéticas hacia al menos un canal realizado en el husillo de trabajo o en el dispositivo de sujeción de herramienta y mediante la evaluación de la señal reflectada desde este canal. La influencia sobre la característica de reflexión por parte de la posición de la herramienta o del elemento de máquina se debe a que el canal define una trayectoria de propagación de ondas desde una superficie exterior del husillo de trabajo o del dispositivo de sujeción de herramienta hasta la herramienta o el elemento de máquina de interés, de modo que al menos en una posición posible de ésta, una parte de su superficie actúa como superficie de reflexión. La distancia de esta superficie de reflexión respecto a la antena de emisión se puede medir según el principio de radar. En comparación con los sistemas de transpondedores del tipo conocido, la invención permite prescindir completamente de la disposición de componentes electrónicos de circuito en un husillo rotatorio de trabajo o en el interior de un dispositivo de sujeción de herramienta, en los que no se dispone de espacio suficiente para esto y las posibilidades de acceso están muy limitadas. La única modificación, que se ha de llevar a cabo forzosamente en el husillo de trabajo o el dispositivo de sujeción de herramienta para poner en práctica la invención, es la realización de al menos un taladro con el fin de crear un canal que actúe como guía de ondas para las ondas electromagnéticas irradiadas y reflectadas. 2 Otra ventaja radica en que componentes de sistemas de radar para la medición de distancia (24 GHz, 60-61 GHz, 76-77 GHz) del sector automovilístico están disponibles comercialmente de forma económica. Esto hace posible recurrir a componentes terminados, ya probados, como elementos constitutivos de todo el sistema y reduce los costos de desarrollo. En una forma de realización especialmente importante de la invención para el control del contacto plano de una herramienta o un portaherramientas en un husillo de trabajo se necesita una pluralidad de canales que finalizan en cada caso en una superficie, en la que el husillo de trabajo está en contacto normalmente con la herramienta o el portaherramientas durante el funcionamiento, de modo que una desviación de la herramienta o del portaherramientas de su posición correcta provoca un desplazamiento y/o una inclinación de las superficies de reflexión. En este caso se simplifica el procesamiento de señales, porque no es necesaria una medición del valor absoluto de la posición de la herramienta o del portaherramientas, sino que es suficiente comprobar la correspondencia de las características de reflexión de los distintos canales para reconocer la exactitud de la posición. Resulta extremadamente conveniente llenar el canal o los canales con un dieléctrico a fin de impedir una afectación de la función realizada por la guía de ondas debido a la penetración de contaminantes y virutas. El único tipo de daño, que se puede producir en este caso en el elemento rotatorio del sistema sensor, es la entrada a presión de una viruta en el dieléctrico. Sin embargo, la reparación de este tipo de daño es más simple y económica en comparación con una reparación en un circuito sensor electrónico integrado en el husillo de trabajo. En caso de una medición de posición en los elementos hidráulicos o neumáticos de máquina puede ser incluso imprescindible este tipo de llenado si el elemento de interés se encuentra en un espacio, en el que impera al menos temporalmente una sobrepresión. A continuación se describen ejemplos de realización de la invención con referencia a los dibujos. Muestran: Fig. 1 una vista delantera de un husillo de trabajo; Fig. 2 una vista esquemática en corte longitudinal parcial de una sujeción incorrecta de herramienta; Fig. 3 una vista en corte longitudinal de una primera forma de realización de la invención; Fig. 4 una vista en corte longitudinal de una segunda forma de realización de la invención; Fig. 5 un diagrama eléctrico de bloques de un primer circuito de evaluación según la invención; Fig. 6 una vista en corte longitudinal a escala ampliada de una sección de una tercera forma de realización de la invención; Fig. 7 un diagrama eléctrico de bloques de un segundo circuito de evaluación según la invención; y Fig. 8 una vista en corte longitudinal de una cuarta forma de realización de la invención. La figura 1 muestra la vista delantera de un husillo 1 de trabajo que forma parte de una máquina de mecanizado no representada, en especial de una máquina herramienta. El husillo 1 de trabajo presenta en su lado frontal una o varias superficies planas 2 de apoyo, en las que una herramienta o un portaherramientas debe descansar de forma plana en el estado de sujeción. En caso de varias superficies separadas 2 de apoyo, éstas se encuentran exactamente en plano paralelo entre sí en un único plano. Para el uso en el... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo para controlar la posición de una herramienta (4) o un elemento (30) de máquina junto a o en un husillo (1) de trabajo o un dispositivo (27) de sujeción de herramienta, en especial en una máquina de mecanizado, caracterizado porque el husillo (1) de trabajo o el dispositivo (27) de sujeción de herramienta presenta al menos un canal (5, 6, 7; 35, 36) que define una guía de ondas que es adecuada para la propagación de ondas electromagnéticas y que conduce de una superficie exterior del husillo (1) de trabajo o del dispositivo (27) de sujeción de herramienta hasta la herramienta (4) o el elemento (30) de máquina y porque está previsto al menos un sistema (11; 37) de radar y está dispuesto por fuera del husillo (1) de trabajo o del dispositivo (27) de sujeción de herramienta de modo que es capaz de irradiar una señal de radar a partir de la superficie exterior hacia el canal (5, 6, 7; 35, 36) y recibir una señal de radar reflectada desde el canal (5, 6, 7; 35, 36), y porque el sistema (11; 37) de radar está unido con un dispositivo (18, 19, 20; 26) de procesamiento de señales que por medio de al menos una señal de radar irradiada hacia el canal (5, 6, 7; 35, 36) y reflectada desde el canal (5, 6, 7; 35, 36) determina una medida para la posición de la herramienta (4) o del elemento (30) de máquina respecto al husillo (1) de trabajo o al dispositivo (27) de sujeción de herramienta. 2. Dispositivo según la reivindicación 1, caracterizado porque el sistema (11) de radar es capaz de irradiar una señal de radar y recibir una señal reflectada de radar en al menos una posición angular predeterminada del husillo (1) de trabajo. 3. Dispositivo según la reivindicación 1 ó 2, caracterizado porque el husillo (1) de trabajo presenta una pluralidad de canales (5, 6, 7) que finalizan en cada caso en una superficie (2), en la que el husillo (1) de trabajo está en contacto con la herramienta (4) o un portaherramientas en caso de una sujeción correcta de la herramienta y porque el dispositivo (18, 19, 20) de procesamiento de señales determina una medida para la posición de la herramienta (4) o del portaherramientas respecto a la superficie (2) por medio de una comparación de las señales de radar reflectadas desde los distintos canales (5, 6, 7) y las señales derivadas de aquí. 4. Dispositivo según la reivindicación 3, caracterizado porque al menos tres canales (5, 6, 7) están dispuestos de manera repartida espacialmente en el lado frontal y/o en la circunferencia del husillo (1) de trabajo. 5. Dispositivo según la reivindicación 3 ó 4, caracterizado porque están previstos varios sistemas (11A, 11B, 11C) de radar del mismo tipo y dispuestos de modo que al menos en una posición angular predeterminada del husillo (1) de trabajo se pueden irradiar simultáneamente señales de radar y recibir señales reflectadas de radar en varios canales (5, 6, 7). 6. Dispositivo según la reivindicación 3 ó 4, caracterizado porque está previsto un único sistema (11) de radar dispuesto de modo que se pueden irradiar señales de radar y recibir señales reflectadas de radar en distintos canales (5, 6, 7) sucesivamente en distintas posiciones angulares predeterminadas del husillo (1) de trabajo, porque el dispositivo (18, 19, 20; 26) de procesamiento de señales presenta una memoria, en la que se almacenan señales reflectadas de radar recibidas o señales derivadas de esto, y porque la comparación de las señales de radar reflectadas desde los distintos canales (5, 6, 7) o las señales derivadas de esto se lleva a cabo mediante el uso de las señales almacenadas en la memoria. 7. Dispositivo según una de las reivindicaciones 2 a 6, caracterizado porque el dispositivo (18, 19, 20; 26) de procesamiento de señales está unido con un dispositivo de medición que emite una señal que indica la posición angular del husillo (1) de trabajo y porque el dispositivo (18, 19, 20; 26) de procesamiento de señales determina la medida para la posición de la herramienta (4) con respecto al husillo (1) de trabajo si esta señal indica la existencia de la posición angular predeterminada. 8. Dispositivo según una de las reivindicaciones 2 a 7, caracterizado porque el al menos un canal (5, 6, 7) comprende al menos una sección (7) en un elemento fijo (8) de máquina y al menos una sección (6, 7) en el husillo rotatorio (1) de trabajo que se alinean entre sí al menos en una posición angular predeterminada del husillo (1) de trabajo. 9. Dispositivo según una de las reivindicaciones 1 a 8, caracterizado porque el al menos un canal (5, 6, 7; 35, 36) está lleno de un dieléctrico al menos a lo largo de una parte de su longitud, partiendo del extremo, desde el que la señal reflectada de radar se propaga hacia el canal (5, 6, 7; 35, 36). 10. Dispositivo según una de las reivindicaciones 1 a 9, caracterizado porque el al menos un canal (5, 6, 7; 35, 36) consta de al menos dos taladros (5, 6; 35, 36) de distintas direcciones, de los que al menos un taladro (6; 36) presenta una componente de dirección radial respecto al eje del husillo (1) de trabajo o del alojamiento (27) de herramienta. 11. Dispositivo según una de las reivindicaciones 1 a 10, caracterizado porque la posición de fase de la señal de salida del al menos un sistema (11) de radar depende de la distancia de una superficie de la herramienta 9 (4) o del elemento (30) de máquina respecto a la antena (12) del sistema (11) de radar. 12. Dispositivo según la reivindicación 11, caracterizado porque están previstos varios sistemas (11A, 11B, 11C) de radar del mismo tipo, cuyas salidas están unidas respectivamente con la entrada de un D-Flipflop (18), porque las salidas del D-Flipflop (18) están unidas con las entradas de una puerta EXOR (19) y porque la salida de la puerta EXOR (19) está unida con la entrada de un circuito comparador (20). 13. Dispositivo según una de las reivindicaciones 1 a 10, caracterizado porque el canal (5, 6, 7; 35, 36) está diseñado como resonador de guía de ondas, cuya frecuencia de resonancia depende de la distancia de una superficie de la herramienta (4) o del elemento (30) de máquina respecto a su extremo. 14. Dispositivo según la reivindicación 13, caracterizado porque está previsto un dispositivo para determinar y evaluar el coeficiente de reflexión, que se origina al irradiarse una señal de radar hacia el canal (5, 6, 7; 35, 36), que presenta dos acopladores direccionales (22, 24) para desacoplar respectivamente un porcentaje definido de la señal de radar irradiada y reflectada, dos detectores (23, 25), unidos en cada caso con uno de los acopladores direccionales (22, 24), para medir las potencias de los porcentajes desacoplados de señal y un dispositivo (26) de procesamiento de señales que está unido con las salidas de ambos detectores (23, 25), determina el coeficiente de reflexión a partir de las señales de salida de ambos detectores (23, 25) y lo compara con un valor umbral. 15. Dispositivo según una de las reivindicaciones 1 a 14, caracterizado porque el elemento (30) de máquina es un elemento de accionamiento, cuyo movimiento provoca la liberación o sujeción de la herramienta (4) o de un portaherramientas en un alojamiento de herramienta. 11 12 13 14
Patentes similares o relacionadas:
Dispositivo de husillo para el empleo en una máquina herramienta de control numérico, del 13 de Mayo de 2020, de DECKEL MAHO PFRONTEN GMBH: Dispositivo de husillo para el empleo en una máquina herramienta de control numérico, con
- una carcasa de husillo , y
- un árbol de husillo […]
Accionamiento de herramienta con árbol de husillo y procedimiento operativo, del 25 de Septiembre de 2019, de LTI Motion GmbH: Procedimiento operativo para un accionamiento de herramienta con árbol de husillo para un mecanizado de formación de viruta, que comprende al menos un actuador […]
Cabezal de fresado para una máquina de tallar engranajes y procedimiento para producir engranajes, del 10 de Abril de 2019, de IMO HOLDING GMBH: Máquina de tallar engranajes para dotar a piezas de trabajo anulares de un engranaje en todo el perímetro de la pieza de trabajo anular o en un área parcial […]
Dispositivo para realizar el acabado de piezas de trabajo, del 12 de Octubre de 2016, de HOMAG GmbH: Dispositivo para realizar el acabado de piezas de trabajo , que preferiblemente están compuestas al menos parcialmente de madera, materiales derivados […]
Husillo eléctrico para máquinas de control numérico, del 30 de Marzo de 2016, de FCS System S.r.l: Un husillo eléctrico para máquinas de control numérico estructurado para bloquear y accionar en rotación una herramienta alrededor de […]
Máquina herramienta con caña retraible, del 3 de Diciembre de 2014, de SORALUCE, S. COOP: Caña retraible para máquinas herramientas y uso de dicha caña retraible en máquinas herramientas, constituida por un núcleo de caña , sobre el cual […]
Aparato para el guiado del portaherramientas de una máquina herramienta, del 16 de Abril de 2014, de SUGIYAMA, AKIRA: Aparato para el guiado de un portaherramientas de una máquina herramienta , comprendiendo dicho aparato de guiado de un portaherramientas un soporte en forma de […]
Dispositivo de husillo de una máquina herramienta, del 27 de Noviembre de 2013, de HORKOS CORP: Un dispositivo de husillo de una máquina herramienta, que comprende:
un husillo ; y
un portaherramientas fijado en una punta del husillo que se puede desmontar […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Accionamiento de herramienta con árbol de husillo y procedimiento operativo, del 25 de Septiembre de 2019, de LTI Motion GmbH: Procedimiento operativo para un accionamiento de herramienta con árbol de husillo para un mecanizado de formación de viruta, que comprende al menos un actuador […]
Accionamiento de herramienta con árbol de husillo y procedimiento operativo, del 25 de Septiembre de 2019, de LTI Motion GmbH: Procedimiento operativo para un accionamiento de herramienta con árbol de husillo para un mecanizado de formación de viruta, que comprende al menos un actuador […]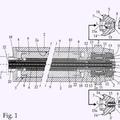 Husillo eléctrico para máquinas de control numérico, del 30 de Marzo de 2016, de FCS System S.r.l: Un husillo eléctrico para máquinas de control numérico estructurado para bloquear y accionar en rotación una herramienta alrededor de […]
Husillo eléctrico para máquinas de control numérico, del 30 de Marzo de 2016, de FCS System S.r.l: Un husillo eléctrico para máquinas de control numérico estructurado para bloquear y accionar en rotación una herramienta alrededor de […]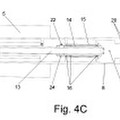 Máquina herramienta con caña retraible, del 3 de Diciembre de 2014, de SORALUCE, S. COOP: Caña retraible para máquinas herramientas y uso de dicha caña retraible en máquinas herramientas, constituida por un núcleo de caña , sobre el cual […]
Máquina herramienta con caña retraible, del 3 de Diciembre de 2014, de SORALUCE, S. COOP: Caña retraible para máquinas herramientas y uso de dicha caña retraible en máquinas herramientas, constituida por un núcleo de caña , sobre el cual […]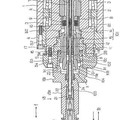 Dispositivo de husillo de una máquina herramienta, del 27 de Noviembre de 2013, de HORKOS CORP: Un dispositivo de husillo de una máquina herramienta, que comprende:
un husillo ; y
un portaherramientas fijado en una punta del husillo que se puede desmontar […]
Dispositivo de husillo de una máquina herramienta, del 27 de Noviembre de 2013, de HORKOS CORP: Un dispositivo de husillo de una máquina herramienta, que comprende:
un husillo ; y
un portaherramientas fijado en una punta del husillo que se puede desmontar […]