Caudalímetro de efecto Coriolis con al menos tres sensores.
Sistema de medición (1) de tipo de Coriolis para medir un caudal másico,
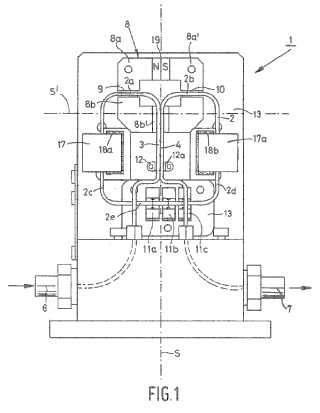
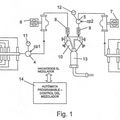
que comprende un tubo de circulación(2) y medios de excitación para hacer que dicho tubo de circulación (2) gire alrededor de un eje de rotación,comprendiendo al menos tres sensores (11a, 11b, 11c);(S1, S2, S3) dispuestos libres en el tubo de circulación (2)para generar señales analógicas que se corresponden con el movimiento del tubo (2), y que comprende medios(CAD 1, CAD2, CAD3) para digitilizar las señales analógicas y medios para el cálculo del caudal másico a partir delas señales de sensor digitalizadas,
caracterizado porque los medios para el cálculo del caudal másico están dispuestos para utilizar exclusivamenteinformación temporal de las señales de sensor, estando presentes dichos medios para derivar a partir de lainformación temporal la relación entre las amplitudes del movimiento del tubo debido a la excitación y a aquellasdebidas a las generadas por las fuerzas Coriolis y para calcular el caudal másico a partir de esta relación.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08075322.
Solicitante: BERKIN B.V..
Nacionalidad solicitante: Países Bajos.
Dirección: NIJVERHEIDSSTRAAT 1A 7261 AK RUURLO PAISES BAJOS.
Inventor/es: JOUWSMA, WYBREN, Mehendale,Aditya.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01F1/84 FISICA. › G01 METROLOGIA; ENSAYOS. › G01F MEDIDA DEL VOLUMEN, FLUJO VOLUMETRICO, FLUJO MASICO O NIVEL DE LIQUIDOS; DOSIFICACION VOLUMETRICA. › G01F 1/00 Medida del flujo volumétrico o flujo másico de un fluido o material sólido fluyente en la que el fluido pasa a través del medidor con un flujo continuo (regulación de la cantidad o proporción G01F 5/00). › Medidores de flujo de coriolis o giroscopo másico.
PDF original: ES-2391487_T3.pdf
Fragmento de la descripción:
Caudalímetro de efecto Coriolis con al menos tres sensores
La invención se refiere a un sistema de medición del tipo de Coriolis para medición de un caudal másico o magnitud de caudal que comprende un tubo de circulación y medios de excitación para hacer rotar al tubo alrededor de un eje de rotación, que comprende al menos tres sensores dispuestos libre en el tubo circulación para generar señales analógicas que se correspondan con el movimiento del tubo, y que comprende medios para digitalizar las señales analógicas y para calcular el caudal másico a partir de las señales de sensor digitalizadas.
Se conocen sistemas de medición de este tipo a partir de los documentos EP 1719982 A1 y EP 1719 983 A1. El sistema de medición descrito allí tiene tres sensores ópticos a, b, c dispuestos en línea y asociados con el tubo para generar señales analógicas en tres posiciones en correspondencia con el movimiento del tubo, siendo en particular las posiciones de los sensores a y b simétricas respecto al eje de rotación, mientras que la posición del sensor c es coaxial a la de los sensores a y b, a una mayor distancia del eje de rotación que de las posiciones de los sensores a y b, y más alejado del a que del b.
El principio de Coriolis está basado en el efecto de que un caudal másico en circulación en un plano en rotación genera una fuerza perpendicular a la dirección de movimiento del caudal másico y al eje de rotación. Para este propósito, habitualmente, una forma tubular se somete a vibración en una frecuencia natural alrededor del eje de rotación. La fuerza de Coriolis genera un movimiento alrededor de un eje de rotación que es perpendicular al eje de la vibración inducida. La relación entre la amplitud de la rotación inducida y la rotación generada por la fuerza de Coriolis es una función lineal del caudal másico. Medir el movimiento de tubo en una situación estratégica (a saber, donde la deflexión debida a la fuerza de Coriolis es máxima) hace posible obtener una determinación óptima de la relación entre el movimiento inducido y el generado. El movimiento del tubo puede determinarse mediante una medición de posición, una medición de velocidad o una medición de aceleración. El método clásico para medir el efecto de Coriolis en un caudalímetro másico de Coriolis es medir el movimiento del tubo por medio de dos sensores alrededor del eje de rotación de la excitación.
En general, las fuerzas de Coriolis generadas son pequeñas, de tal manera la relación entre la amplitud de las fuerzas generadas e inducidas será pequeña. Dadas estas pequeñas relaciones, la diferencia de fase entre dos sensores es, por tanto, aproximadamente igual a la relación entre los desplazamientos generados e inducidos. La diferencia de fase en este caso es una medida para el caudal másico de un medio circulante a través del tubo. Las pequeñas diferencias de fase son aquí una función lineal del caudal másico.
La posición de los sensores respecto de la posición neutra del tubo no cambia habitualmente en los caudalímetros másicos del tipo de Coriolis existentes, ya que el tubo tiene una forma fija o porque los sensores están mecánicamente incorporados al tubo. La situación exacta de los sensores respecto del polo de rotación del tubo, sin embargo, determina la sensibilidad del instrumento. Si esta situación no muestra desviación, la sensibilidad de un instrumento puede determinarse definitivamente a través de calibración. Siempre habrá una pequeña variación de sensibilidad entre los instrumentos individuales, debido a una variación en las posiciones de los sensores entre otros factores, y cada instrumento tendrá que ser calibrado para obtener una precisión máxima.
Los instrumentos de medición de caudal tales como, por ejemplo, los descritos en EP 1719982 A1 y EP 1719983 A, tienen que ser muy sensibles al efecto Coriolis para así ser capaces de medir de forma precisa caudales másicos bajos, comprenden un tubo que está suspendido (de forma elástica) para así poder ser movido por fuerzas muy bajas mientras están asociados a sensores sin contacto. Esto tiene como desventaja que las posiciones exactas de los sensores respecto del eje de rotación del tubo no son constantes. Este eje de rotación puede mostrar desviación con el transcurso del tiempo debido a la temperatura, presión, o de las fuerzas de gravedad. Puesto que los sensores del instrumento no están conectados al tubo, si se utilizan dos sensores la sensibilidad del instrumento mostrará una correspondiente desviación. El cambio de fase medida está entonces influenciada no solo por el caudal másico, sino también por las posiciones de los dos sensores respecto del denominado polo de rotación. Esto causa una desviación en la sensibilidad del instrumento y le hace menos apropiado para ser utilizado como un caudalímetro másico de precisión.
La invención tiene por objeto, entre otros, proporcionar un caudalímetro del tipo de Coriolis que tenga una mayor sensibilidad y precisión para ser capaz de medir satisfactoriamente magnitudes de caudal bajas. De acuerdo con la invención, un primer aspecto del caudalímetro másico del tipo mencionado en el párrafo de apertura está caracterizado porque los medios para calcular el caudal másico están dispuestos para utilizar exclusivamente la información temporal de las señales de sensor.
El caudalímetro de acuerdo con la invención utiliza sensores que miden el movimiento del tubo sin contacto, por ejemplo de forma capacitiva o en particular de forma óptica. Los sensores ópticos son capaces de medir la información temporal del movimiento armónico de tubo con un alto grado de precisión. Si la información de amplitud del sensor también se utiliza, es posible compensar la desviación del polo de rotación indicado anteriormente. La información precisa de dos sensores en tiempo y amplitud son suficientes en principio para determinar la relación entre el movimiento de la excitación y del generado por las fuerzas de Coriolis, proporcionando un tubo de forma laxa. Ya que la información de amplitud de las señales de los sensores utilizados puede ser objeto de desviación debido a la temperatura y envejecimiento, la amplitud no es muy apropiada para utilizarse como información suplementaria. De conformidad con la invención, por tanto, se utiliza la información temporal de un tercer sensor. Esto puede compensar el desplazamiento del polo de rotación del tubo.
El documento US 6.705.172 revela un sistema de medición de caudal del tipo de Coriolis que comprende un tubo, un vibrador de tubo, dos sensores de desplazamiento en los puntos A y B, y un sensor más dispuesto en el punto del vibrador C. Se menciona que: “es posible de esta manera determinar la amplitud y el preciso ángulo de fase cero. Partiendo de aquí los ángulos de fase precisos de la vibraciones pueden ser determinados en los puntos A y B” (Col. 6, líneas 40, 43) . Esto significa que de acuerdo con el US 6.705.172 es necesario determinar la amplitud y el ángulo de fase de al menos un señal de sensor. En otras palabras: no solo se determina la información temporal sino también la información de amplitud.
La invención se distingue porque los medios están presentes para derivar a partir de la información temporal la relación entre las amplitudes del movimiento del tubo debido a la excitación y a aquellas debidas a las generadas por las fuerzas de Coriolis y calculando el caudal másico a partir de esta relación.
La relación exacta entre la excitación y el desplazamiento generado puede ser determinado de forma precisa a partir de la información temporal precisa del tercer sensor, con independencia de la situación exacta del polo de rotación del tubo respecto de los sensores. La información temporal precisa de los tres sensores se utiliza para determinar de forma precisa la relación de amplitudes entre la excitación y las generadas por las fuerzas Coriolis, ello por medio de algoritmos de circuitos electrónicos digitales, incluso cuando la situación del polo de rotación pudiera desplazarse durante el funcionamiento normal. Ya que la relación entre dos amplitudes es una función lineal del caudal másico, dicho caudal másico puede determinarse a través de multiplicaciones por un factor de sensibilidad.
En una realización del sistema de medición de caudal del tipo de Coriolis de acuerdo con la invención, los dos primeros sensores están situados juntos y de forma simétrica respecto del eje de rotación del tubo. Un tercer sensor se monta inmediatamente adyacente a uno de los... [Seguir leyendo]
Reivindicaciones:
1. Sistema de medición (1) de tipo de Coriolis para medir un caudal másico, que comprende un tubo de circulación
(2) y medios de excitación para hacer que dicho tubo de circulación (2) gire alrededor de un eje de rotación, comprendiendo al menos tres sensores (11a, 11b, 11c) ; (S1, S2, S3) dispuestos libres en el tubo de circulación (2) para generar señales analógicas que se corresponden con el movimiento del tubo (2) , y que comprende medios (CAD 1, CAD2, CAD3) para digitilizar las señales analógicas y medios para el cálculo del caudal másico a partir de las señales de sensor digitalizadas,
caracterizado porque los medios para el cálculo del caudal másico están dispuestos para utilizar exclusivamente información temporal de las señales de sensor, estando presentes dichos medios para derivar a partir de la información temporal la relación entre las amplitudes del movimiento del tubo debido a la excitación y a aquellas debidas a las generadas por las fuerzas Coriolis y para calcular el caudal másico a partir de esta relación.
2. Sistema de medición del tipo de Coriolis como el reivindicado en la reivindicación 1, caracterizado por sensores S1, S2 y S3 asociados en el tubo de circulación para generar señales analógicas en tres posiciones en dependencia del movimiento del tubo, donde las posiciones de los sensores S1 y S2 son simétricas respecto al eje de rotación, mientras la posición del sensor S3 es coaxial a la posiciones de los sensores S1 y S2, está a una mayor distancia del eje de rotación que las posiciones de los sensores S1 y S2, y más alejado del S2 que del S1.
3. Sistema de medición del tipo de Coriolis como el revindicado en la reivindicación 1, caracterizado por medios para generar señales seno y coseno que tengan la misma frecuencia, medios para multiplicar cada una de las señales digitalizadas por las señales seno y coseno salientes a un filtro paso bajo para proporcionar los componentes DC de las señales producto, medios para calcular la fase respecto de una fase de referencia a partir de la relación entre los dos componentes DC de cada señal entrante, medios para calcular la diferencia de fase entre la señal de los sensores S1 y S2, medios para calcular la diferencia de fase entre las señales de los sensores S1 y S3, y medios para calcular el caudal másico a partir de las diferencias de fase mencionadas.
4. Sistema de medición del tipo de Coriolis como el reivindicado en la reivindicación 1 o 2, caracterizado por medios para digitalizar las señales analógicas y para generar señales de sensor digitalizadas, siendo leída dos veces la señal de, al menos, uno de los sensores.
5. Sistema de medición del tipo de Coriolis como el reivindicado en la reivindicación 4, caracterizado por que la señal que es leída dos veces, es la señal de uno de los sensores que están simétricamente dispuestos respecto del eje de rotación.
6. Método de medición de un caudal másico por medio de un sistema de medición del tipo de Coriolis, con un tubo de circulación y al menos tres sensores asociados con estos para generar señales analógicas en dependencia del movimiento del tubo, cuyo método comprende las siguientes etapas:
- excitar el tubo de circulación en un modo primario para así hacerle oscilar alrededor del eje de rotación.
- digitalizar la señales analógicas de sensor
- calcular el caudal másico a partir de las señales de sensor digitalizadas, donde se utiliza exclusivamente la información temporal de dichas señales de sensor para calcular el caudal másico, la relación entre las amplitudes del movimiento del tubo debido a la excitación y a aquellos debidos a la generación de fuerzas de Coriolis que se deriva a partir de la información y siendo calculado el caudal másico a partir esta relación.
7. Método para medición de un caudal másico como es reivindicado en la reivindicación 6, caracterizado porque la información temporal de todos los sensores es utilizada, mediante algoritmos de circuitos eléctricos, para determinar la relación entre las amplitudes debida a la excitación y aquellas debidas a las generadas por fuerzas de Coriolis.
La lista de referencias citada por el solicitante lo es solamente para utilidad del lector, no formando parte de los documentos de patente europeos. Aún cuando las referencias han sido cuidadosamente recopiladas, no pueden excluirse errores u omisiones y la OEP rechaza toda responsabilidad a este respecto.
Documentos de patente citados en la descripción
• EP 1719982 A1 [0002] [0006] • US 6705172 B [0009]
• EP 1719983 A1 [0002] [0006]
Patentes similares o relacionadas:
Sensor de flujo de efecto Coriolis, del 16 de Octubre de 2019, de BERKIN B.V.: Un sensor de flujo de efecto Coriolis, que comprende: - un tubo de Coriolis; - medios (9, 9', 10) de excitación para hacer oscilar dicho tubo en […]
Dispositivo de medición del flujo y su uso, del 7 de Agosto de 2019, de BERKIN B.V.: Un medidor de flujo para determinar un flujo de un medio, comprendiendo dicho medidor de flujo un tubo de flujo para transportar el […]
Sistema de medición de flujo y procedimiento para determinar al menos una propiedad de un medio, del 30 de Noviembre de 2016, de BERKIN B.V.: Sistema de medición de flujo para determinar el flujo de un medio, que comprende un sensor de flujo de tipo Coriolis, un sensor de […]
 Caudalímetro másico de tipo Coriolis, del 18 de Julio de 2013, de BERKIN B.V.: Caudalímetro másico de tipo Coriolis que comprende: un tubo detector que forma un bucle a través delcual, durante el funcionamiento, circula un medio y que tiene […]
Caudalímetro másico de tipo Coriolis, del 18 de Julio de 2013, de BERKIN B.V.: Caudalímetro másico de tipo Coriolis que comprende: un tubo detector que forma un bucle a través delcual, durante el funcionamiento, circula un medio y que tiene […]
 Sistema de medición de caudal tipo de Coriolis con convertidores analógico/digital con una frecuencia de muestreo ajustable, del 18 de Julio de 2012, de BERKIN B.V.: Sistema de medición de caudal de tipo de Coriolis para medición de un caudal másico de un medio en circulación,que comprende un tubo de circulación y medios de arrastre […]
Sistema de medición de caudal tipo de Coriolis con convertidores analógico/digital con una frecuencia de muestreo ajustable, del 18 de Julio de 2012, de BERKIN B.V.: Sistema de medición de caudal de tipo de Coriolis para medición de un caudal másico de un medio en circulación,que comprende un tubo de circulación y medios de arrastre […]
 Caudalímetro másico de Coriolis que utiliza detección y excitación sin contacto, del 13 de Junio de 2012, de BERKIN B.V.: Caudalímetro másico del tipo de Coriolis con un tubo de detección fabricado a partir de un material eléctricamenteconductor, a través del cual un medio circula durante […]
Caudalímetro másico de Coriolis que utiliza detección y excitación sin contacto, del 13 de Junio de 2012, de BERKIN B.V.: Caudalímetro másico del tipo de Coriolis con un tubo de detección fabricado a partir de un material eléctricamenteconductor, a través del cual un medio circula durante […]
 MEZCLADOR DE PRODUCTOS PASTOSOS CON SISTEMA DE LIMPIEZA INTEGRADO, del 16 de Agosto de 2007, de INDUATESIS, S.L.: Mezclador de productos pastosos con sistema de limpieza integrado.#Comprende una pluralidad de entradas de productos pastosos a mezclar, en particular pinturas, […]
MEZCLADOR DE PRODUCTOS PASTOSOS CON SISTEMA DE LIMPIEZA INTEGRADO, del 16 de Agosto de 2007, de INDUATESIS, S.L.: Mezclador de productos pastosos con sistema de limpieza integrado.#Comprende una pluralidad de entradas de productos pastosos a mezclar, en particular pinturas, […]
SENSOR DE FLUJO DE CORIOLIS CON MASA OSCILANTE SUSPENDIDA ELÁSTICAMENTE, del 12 de Diciembre de 2011, de BERKIN B.V.: Sensor de flujo de Coriolis con un tubo de Coriolis, que tiene dos extremos (32, 32') y está fijado en una carcasa, dichos extremos (32, 32') […]