Aplicador de grapas quirúrgicas.
Un aplicador (10) de grapas quirúrgicas, que comprende:
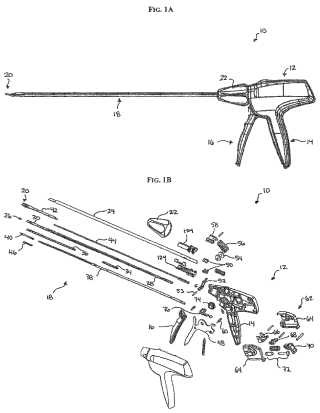
una carcasa (12) de una empuñadura que presenta un gatillo (16) acoplado a aquella;
un eje alargado (18) que se extiende desde la carcasa (12) de la empuñadura y que presenta unasmordazas (20) opuestas conformadas sobre su extremo distal y que pueden ser desplazadas entre unaposición abierta y una posición cerrada caracterizado por;
un montaje de avance de grapas dispuesto por dentro del eje alargado (18) para hacer avanzar al menosuna grapa (36) a través del eje alargado (18) para situar una grapa (36) entre las mordazas opuestas (20);
un montaje de conformación de las grapas acoplado al gatillo y adaptado para accionar las mordazasopuestas; y
un tirante flexible (52) dispuesto dentro de la carcasa (12) de la empuñadura y adaptado para transferir elmovimiento desde el gatillo (16) hasta el montaje de avance de las grapas para provocar que el montaje deavance de las grapas avance al menos una grapa (36) en respuesta al desplazamiento del gatillo (16)en el que el gatillo (16) presenta dos etapas secuenciales de actuación, siendo el gatillo (16) eficaz para accionar elmontaje de avance de las grapas durante la primera etapa de accionamiento, y siendo el gatillo (16) eficaz paraaccionar un montaje de conformación de las grapas y siendo flexible con respecto al montaje de avance de lasgrapas durante la segunda etapa de accionamiento.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06252080.
Solicitante: ETHICON ENDO-SURGERY, INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 4545 CREEK ROAD CINCINNATI, OHIO 45242 ESTADOS UNIDOS DE AMERICA.
Inventor/es: HUITEMA, THOMAS W., VITALI, DARIO, Molitor,Nicholas G, Bertke,Brian D, Koch Jr,Robert L.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/12 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › para ligar o comprimir partes tubulares del cuerpo, p. ej. los vasos sanguíneos, el cordón umbilical.
PDF original: ES-2387894_T3.pdf
Fragmento de la descripción:
Aplicador de grapas quirúrgicas
Campo de la invención
La presente invención se refiere, en general, al campo de los dispositivos quirúrgicos y, en particular, al de los procedimientos y dispositivos para la aplicación de grapas quirúrgicas en conductos, vasos, derivaciones, etc.
Antecedentes de la invención
En los últimos años, la cirugía ha experimentado un avance considerable mediante la realización de procedimientos quirúrgicos laparascópicos y endoscópicos, como por ejemplo colecistectomías, gastrostomías, apendectomías, y reparación de hernias. Estos procedimientos se llevan a cabo mediante un montaje de trócar, el cual es un instrumento quirúrgico para perforar una cavidad corporal. El trócar típicamente contiene una punta aguzada de un obturador y un tubo o cánula del trócar. La cánula del trócar es insertada en la piel para acceder a la cavidad corporal mediante la utilización de la punta del obturador para penetrar la piel. Después de la penetración, el obturador es retirado y la cánula del trócar permanecen dentro del cuerpo. Es a través de esta cánula por donde son situados los instrumentos quirúrgicos.
Un instrumento quirúrgico que habitualmente se utiliza con una cánula de trócar es un aplicador de grapas quirúrgicas para ligar un vaso sanguíneo, un conducto, una derivación o una porción de tejido corporal en el desarrollo de la introducción quirúrgica. La mayoría de los aplicadores de grapas presentan una empuñadura con un eje alargado que presenta un par de mordazas opuestas amovibles constituidas en uno de sus extremos para contener y conformar una grapa de ligadura entre ellas. Las mordazas son situadas alrededor del vaso o conducto, y la grapa es aplastada o conformada sobre el vaso mediante el cierre de las mordazas.
En muchos de los aplicadores de grapas de la técnica anterior, los mecanismos de alimentación y conformación requieren una sincronización precisa y un movimiento coordinado de los componentes para que funcionen, como por ejemplo el mostrado en el documento US 5, 582, 615. Esta exigencia de una sincronización y un control precisos se ha traducido en la necesidad de unos diseños mecánicos complejos, incrementando de esta forma el coste de los aplicadores de grapas. Muchos aplicadores de grapas de la técnica anterior, así mismo, utilizan un mecanismo de avance de las grapas cargado por resorte para hacer avanzar una o más grapas a través del eje del dispositivo. Como resultado de ello, las mordazas deben contener un mecanismo para impedir la proyección accidental de la grapa desde el dispositivo antes de que la grapa sea conformada. Otros inconvenientes de los aplicadores de grapas actuales incluyen la incapacidad para gestionar una sobrecarga aplicada a las mordazas por el gatillo en una diversidad de situaciones. Muchos dispositivos requieren el cierre completo de las mordazas, lo que puede provocar la sobrecarga de las mordazas cuando el vaso o conducto situado entre ellas es demasiado amplio para permitir el cierre completo o cuando un objeto extraño se sitúa entre las mordazas.
De acuerdo con ello, persiste la necesidad de unos procedimientos y unos dispositivos mejorados para la aplicación de grapas quirúrgicas en vasos, conductos, derivaciones, etc.
Sumario de la invención
La presente invención proporciona unos dispositivos para la aplicación de una grapa quirúrgica en un vaso, conducto, derivación, etc. En una forma de realización ejemplar, se proporciona un aplicador de grapas quirúrgicas que presenta una carcasa con un gatillo acoplado de forma amovible a aquella y un eje alargado que se extiende desde aquél con unas mordazas opuestas constituidas en su extremo distal. El gatillo está adaptado para hacer avanzar una grapa para situar la grapa entre las mordazas, y para desplazar las mordazas de una posición abierta a una posición cerrada para acodillar la grapa situada entre ellas.
El aplicador de grapas quirúrgicas puede ofrecer una diversidad de configuraciones, y puede incluir una diversidad de elementos característicos para facilitar el avance y la conformación de una grapa quirúrgica. En una forma de realización, el aplicador de grapas quirúrgicas puede incluir una zapata de alimentación que esté dispuesta de forma que pueda deslizarse por dentro del eje alargado y que esté adaptada para impulsar al menos una grapa quirúrgica a través del eje alargado. En una forma de realización ejemplar, la zapata de alimentación puede estar adaptada para desplazarse solo en una dirección distal, de forma que se impida sustancialmente el desplazamiento proximal de la zapata de alimentación. El eje alargado puede, así mismo, incluir una pista para las grapas dispuesta en su interior y adaptada para asentar al menos una grapa quirúrgica. La zapata de alimentación puede estar dispuesta de manera que pueda deslizarse por dentro de la pista para las grapas.
Puede ser utilizada una diversidad de técnicas para facilitar el desplazamiento distal e impedir el desplazamiento proximal de la zapata de alimentación. En una forma de realización ejemplar, la zapata de alimentación puede incluir una lengüeta adaptada para encajar con la pista para las grapas para impedir el desplazamiento proximal de la zapata de alimentación dentro de la pista para las grapas, permitiendo, sin embargo, el desplazamiento distal de la zapata de alimentación por dentro de la pista para las grapas. La pista para las grapas puede incluir varias aberturas conformadas en su interior para la recepción de la lengüeta para impedir el desplazamiento proximal de la zapata
de alimentación dentro de la pista para las grapas. En otra forma de realización ejemplar, la zapata de alimentación puede incluir una lengüeta y la barra de alimentación puede incluir varios retenes constituidos en su interior y estar adaptada para encajar con la lengüeta para mover con la zapata de alimentación en dirección distal cuando la barra de alimentación sea desplazada en dirección distal.
En otra forma de realización, el eje alargado puede incluir una barra de alimentación dispuesta de manera que pueda deslizarse por su interior y que esté acoplada al gatillo, de tal manera que el desplazamiento del gatillo hacia una posición cerrada esté adaptada para hacer avanzar la barra de alimentación en sentido distal avanzando de esta manera en sentido distal la zapata de alimentación. A modo de ejemplo no limitativo, la barra de alimentación puede estar acoplada al gatillo mediante un inserto del gatillo que esté acoplado al gatillo, y mediante un tirante que se extienda entre el inserto del gatillo y el extremo proximal de la barra de alimentación. El extremo proximal de la barra de alimentación puede incluir un acoplador que esté adaptado para recibir una porción del tirante. La barra de alimentación puede, así mismo, incluir un extremo distal que presente un avanzador que esté adaptado para encajar con la grapa más distal y para introducir la grapa más distal dentro de las mordazas. En determinadas formas de realización ejemplares, la barra de alimentación puede estar adaptada para encajar e iniciar el avance de la grapa más distal dentro de las mordazas antes del inicio del avance de la zapata de alimentación.
En otra forma de realización, se proporciona un montaje de avance de las grapas para hacer avanzar una grapa a través de un aplicador de grapas quirúrgicas. El montaje de avance de las grapas puede ser utilizado con una diversidad de aplicadores de grapas quirúrgicas, incluyendo los conocidos en la técnica. En una forma de realización ejemplar, el montaje de avance de las grapas puede incluir una pista para las grapas que esté adaptada para aceptar al menos una grapa, y una zapata de alimentación que esté adaptada para coincidir de manera que pueda deslizarse con la pista para las grapas y para desplazarse en dirección distal para desplazar al menos una grapa dispuesta en el interior de la pista para las grapas en dirección distal. La zapata de alimentación puede incluir, en una forma de realización ejemplar, una lengüeta que esté adaptada para encajar con la pista para las grapas para impedir el desplazamiento proximal de la zapata de alimentación por dentro de la pista para las grapas, y que esté adaptada para hacer posible el desplazamiento distal de la zapata de alimentación por dentro de la pista para las grapas. La pista para las grapas puede incluir una pluralidad de aberturas constituidas en su interior para la recepción de la lengüeta para impedir el desplazamiento proximal de la zapata... [Seguir leyendo]
Reivindicaciones:
1. Un aplicador (10) de grapas quirúrgicas, que comprende:
una carcasa (12) de una empuñadura que presenta un gatillo (16) acoplado a aquella;
un eje alargado (18) que se extiende desde la carcasa (12) de la empuñadura y que presenta unas mordazas (20) opuestas conformadas sobre su extremo distal y que pueden ser desplazadas entre una posición abierta y una posición cerrada caracterizado por;
un montaje de avance de grapas dispuesto por dentro del eje alargado (18) para hacer avanzar al menos una grapa (36) a través del eje alargado (18) para situar una grapa (36) entre las mordazas opuestas (20) ;
un montaje de conformación de las grapas acoplado al gatillo y adaptado para accionar las mordazas opuestas; y
un tirante flexible (52) dispuesto dentro de la carcasa (12) de la empuñadura y adaptado para transferir el movimiento desde el gatillo (16) hasta el montaje de avance de las grapas para provocar que el montaje de avance de las grapas avance al menos una grapa (36) en respuesta al desplazamiento del gatillo (16)
en el que el gatillo (16) presenta dos etapas secuenciales de actuación, siendo el gatillo (16) eficaz para accionar el montaje de avance de las grapas durante la primera etapa de accionamiento, y siendo el gatillo (16) eficaz para accionar un montaje de conformación de las grapas y siendo flexible con respecto al montaje de avance de las grapas durante la segunda etapa de accionamiento.
2. El aplicador (10) de grapas quirúrgicas de la reivindicación 1, en el que el tirante flexible (52) está dispuesto de forma basculante por dentro de la carcasa y se extiende entre el montaje de avance de las grapas y un inserto (48) del gatillo que está acoplado al gatillo (16) .
3. El aplicador (10) de grapas quirúrgicas de la reivindicación 2, en el que el montaje de avance de las grapas incluye una barra (38) de alimentación que se extiende a través del eje alargado (18) y que presenta un extremo distal (38b) adaptado para hacer avanzar en dirección distal al menos una grapa (36) a través del eje alargado (18) y un extremo proximal (38a) acoplado al acoplador (50) de la barra de alimentación para recibir una porción del tirante flexible (52) .
4. El aplicador (10) de grapas quirúrgicas de la reivindicación 3, en el que el tirante flexible (52) incluye un primer extremo (52b) adaptado para ser recibido dentro de un rebajo conformado dentro del acoplador (50) de la barra de alimentación y un segundo extremo (52a) adaptado para ser recibido dentro de un rebajo (108) conformado en el inserto (48) del gatillo.
5. El aplicador (10) de grapas quirúrgicas de la reivindicación 4, en el que el tirante flexible (52) está adaptado para bascular alrededor de un eje geométrico transversal situado entre los primero y segundo extremos (52a, 52b) y que se extiende sustancialmente en perpendicular con respecto a un eje geométrico longitudinal que se extiende entre los primero y segundo extremos (52a, 52b) .
6. El aplicador (10) de grapas quirúrgicas de la reivindicación 1, en el que el tirante flexible (52) está adaptado para flexionarse cuando el gatillo (16) es desplazado hacia una posición cerrada.
7. El aplicador (10) de grapas quirúrgicas de la reivindicación 1, en el que el tirante flexible (52) está conformado de un polímero.
8. El aplicador (10) de grapas quirúrgicas de la reivindicación 1, en el que el tirante flexible (52) está conformado de un metal.
9. El aplicador (10) de grapas quirúrgicas de la reivindicación 3, en el que el acoplador (50) comprende unas bridas anulares opuestas (50d, 50e) que definen un surco anular (50f) entre ellas para el asentamiento de una porción del tirante flexible (52) .
10. El aplicador (10) de grapas quirúrgicas de la reivindicación 9, en el que el tirante flexible (50) incluye unos brazos opuestos (114a, 114b) que están adaptados para ser recibidos dentro del surco anular (50f) .
11. El aplicador (10) de grapas quirúrgicas de la reivindicación 2, en el que el inserto (48) del gatillo está adaptado para provocar que el tirante flexible (52) bascule y se flexione durante la primera etapa de accionamiento, y en el que el inserto (48) del gatillo está adaptado para mantener el tirante flexible (52) en una posición flexionada durante la segunda etapa de accionamiento.
Patentes similares o relacionadas:
 Sistema de separación de dispositivo de oclusión vascular con cable central ahusado y separación activada mediante calor, del 29 de Julio de 2020, de DePuy Synthes Products, Inc: Un sistema de separación o desprendimiento, que comprende:
un componente fusible por calor que tiene una resistividad predeterminada; de manera que el componente […]
Sistema de separación de dispositivo de oclusión vascular con cable central ahusado y separación activada mediante calor, del 29 de Julio de 2020, de DePuy Synthes Products, Inc: Un sistema de separación o desprendimiento, que comprende:
un componente fusible por calor que tiene una resistividad predeterminada; de manera que el componente […]
Sistemas y dispositivos para envolver una abertura anatómica, del 1 de Julio de 2020, de Pulsar Vascular, Inc: Un dispositivo para aneurismas que puede liberarse endovascularmente en un punto o lugar próximo a un aneurisma, de manera que el […]
Dispositivos de oclusión de corazón, del 10 de Junio de 2020, de W.L. GORE & ASSOCIATES, INC.: Dispositivo para ocluir una abertura en un tejido que comprende: a. un primer alambre flexible y un segundo alambre flexible, en el que cada uno de los alambres […]
Dispositivo rellenador de espacio, del 10 de Junio de 2020, de W.L. GORE & ASSOCIATES, INC.: Dispositivo médico, que comprende: un miembro de vaso que define un compartimiento interior del miembro de vaso, estando configurado el miembro […]
Retracción mecánica mediante anclaje para reducción de volumen pulmonar, del 13 de Mayo de 2020, de ETHICON, INC.: Un dispositivo para reducir el volumen de una región de tejido, que comprende un primer elemento de fijación , un segundo elemento de fijación y un anclaje […]
Dispositivos para el tratamiento de defectos vasculares, del 13 de Mayo de 2020, de Covidien LP (100.0%): Un implante expandible configurado para colocarse dentro de un aneurisma, el implante que comprende: una primera hebra similar a una cinta de malla […]
Actuador para implante desplegable, del 13 de Mayo de 2020, de Coleman, James E: Un actuador para desplegar un implante, que comprende: un alojamiento que tiene partes proximal y distal, la parte proximal es […]
Aparato para aplicar dispositivos para reducir la presión atrial izquierda, del 6 de Mayo de 2020, de V-Wave Ltd: Aparato para aplicar un dispositivo para regular la presión sanguínea entre el atrio izquierdo y el atrio derecho de un paciente, comprendiendo el aparato: una o más patas […]