ALIMENTADOR AUTOMÁTICO PARA ESCÁNER.
Alimentador automático para escáner, formado por un conjunto de almacén (1) que comprende dos almacenes (1.
1 y 1.2), para colocar en ellos , respectivamente, los documentos destinados a ser escaneados en un escáner (2) y los documentos después de ser escaneados, yendo en relación con dicho conjunto de almacén (1) y con el escáner (2) un robot manipulador (3) que es capaz de llevar los documentos a escanear desde el almacén (1.1) hasta el escáner (2), disponiéndolos para ser escaneados, así como retirar del escáner (2) los documentos escaneados y llevarlos hasta el almacén (1.2), permitiendo realizar el escaneado de series de documentos automáticamente, sin intervención de operarios.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201000180.
Solicitante: TRABAJOS CATASTRALES, S.A.
Nacionalidad solicitante: España.
Inventor/es: URTASUN GARDE,FERNANDO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65H3/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65H MANIPULACION DE MATERIALES DELGADOS O FILIFORMES, p. ej. HOJAS, BANDAS, CABLES. › B65H 3/00 Sacado de artículos de las pilas (unión, colocación o agrupado de artículos B65H 39/00; máquinas para separar bandas superpuestas B65H 41/00; desapilado de material delgado combinado con el plegado B65H 45/26; combinaciones de operaciones de apilado y de sacado de artículos, presentando un interés distinto de la operación individual de apilado o de sacado B65H 83/00). › que utilizan la fuerza neumática.
- B65H5/08 B65H […] › B65H 5/00 Transferencia de artículos sacados de las pilas; Alimentación de artículos a las máquinas (mecanismos o elementos idénticos para la libertad o progresión de artículos a la salida de las máquinas B65H 29/00; recirculación de artículos B65H 85/00). › por pinzas, p. ej. pinzas de ventosas.
- H04N1/00 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › Exploración, transmisión o reproducción de documentos o similares, p. ej. transmisión facsímil; Sus detalles.
Fragmento de la descripción:
Alimentador automático para escáner.
Sector de la técnica
La presente invención está relacionada con el proceso de alimentación de los documentos a procesar en un escáner, proponiendo un alimentador que permite colocar y retirar de manera automática los documentos a escanear, facilitando así el proceso de escaneado de grandes series de documentos sin que un operario tenga que estar ocupado en ello.
Estado de la técnica
Existen procesos de escaneado, para almacenado y/o envío electrónico de series de documentos, como por ejemplo las fotografías que los municipios suelen realizar de su ámbito geográfico y que se guardan en archivo para cualquier consulta que pueda surgir relacionada con los territorios.
Cuando las series de los documentos a escanear son muy grandes, el proceso del escaneado requiere la ocupación de una o más personas, las cuales deben realizar un trabajo muy monótono de colocación y retirada de los documentos en el escáner, llegándose a producir un estado de cansancio que propicia los errores, y además el proceso del trabajo se tiene que interrumpir cuando se cumple la jornada laboral, lo que puede hacer que la tarea se prolongue en demasiado tiempo.
Objeto de la invención
De acuerdo con la invención se propone un alimentador que permite realizar de manera automática la colocación y la retirada de los documentos a procesar en un escáner, con lo cual se evitan los problemas que conlleva el trabajo manual de esas operaciones.
Este alimentador objeto de la invención consta de un doble almacén, en donde se disponen, respectivamente, los documentos destinados a ser escaneados y los documentos después de ser escaneados, yendo en una posición correlativa con el escáner de aplicación y con ese doble almacén, un robot manipulador que es capaz de coger los documentos a escanear del almacén de alimentación y colocarlos en el escáner, así como coger del escáner los documentos escaneados y llevarlos hasta el almacén de recogida, mientras que en combinación con la actuación de ese robot manipulador, van dispuestos un actuador de accionamiento del pulsador de activación del escáner y un actuador de cierre y apertura de la tapa del escáner.
El robot manipulador consta de dos brazos que van asociados en una unidad de movimiento conjunto, con desplazamiento vertical por respectivas columnas y desplazamiento horizontal a lo largo de una guía longitudinal, incorporando uno de los brazos un sistema de vacío para coger los documentos que se tienen que manipular, mientras que el otro bazo posee un sistema de garras para manipular una placa de cristal que se coloca sobre los documentos en el escáner.
Los almacenes de los documentos poseen en los laterales unos topes regulables, permitiendo la adaptación para documentos de diferentes dimensiones, los cuales se disponen en dichos almacenes en un apilado vertical.
Se obtiene así un alimentador que resulta de características muy ventajosas para la aplicación a la que se halla destinado, adquiriendo vida propia y carácter preferente para dicha aplicación.
Descripción de las figuras
La figura 1 muestra en perspectiva un montaje de aplicación del alimentador objeto de la invención, en alojamiento dentro de una estructura de protección.
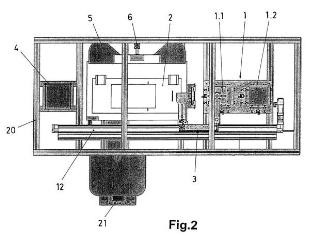
La figura 2 es una vista en planta del conjunto de la figura anterior, observándose la distribución del alimentador y el escáner de aplicación.
La figura 3 es una perspectiva ampliada del doble almacén del alimentador.
La figura 4 es una vista en planta de dicho doble almacén del alimentador.
La figura 5 es una perspectiva del robot manipulador del alimentador.
Descripción detallada de la invención
El objeto de la invención se refiere a un alimentador destinado para colocar y retirar automáticamente documentos respecto de un escáner, permitiendo realizar el escaneado de grandes series de documentos sin la intervención de operarios durante el proceso.
El alimentador preconizado consta de un conjunto de almacén (1) que comprende dos almacenes (1.1 y 1.2), destinado uno de ellos, por ejemplo el almacén (1.1), para colocar en él los documentos a escanear, mientras que el otro almacén (1.2) está destinado para recoger en él los documentos después de escaneados.
Dicho conjunto de almacén (1) se coloca a un lado de un escáner (2) de aplicación, disponiéndose en relación con ese conjunto de almacén (1) y del escáner (2) un robot manipulador (3) encargado de colocar y retirar los documentos de aplicación respecto del escáner (2).
A un lado del escáner (2) se dispone además una zona en la que se sitúa en espera una placa de cristal (4) destinada para colocarse sobre los documentos en el escáner (2) para realizar las operaciones de escaneado, yendo en relación con la tapa (5) del escáner (2) un actuador (6) que acciona el movimiento de dicha tapa (5) entre las posiciones de cierre y apertura.
El robot manipulador (3) costa de dos brazos (7 y 8), los cuales van asociados en una unidad de movimiento conjunto, pudiendo desplazarse verticalmente sobre respectivas columnas (9 y 10), mediante accionamiento por un motor reductor (11), y en desplazamiento horizontal a lo largo de una guía (12) longitudinal mediante accionamiento por un motor reductor (13).
Un brazo (7) de dicho robot manipulador (3) posee un sistema de vacío (14), mediante el cual es capaz de coger los documentos (15) para trasladarlos entre el conjunto de almacén (1) y el escáner (2), mientras que el otro brazo (8) posee un sistema de garras (16), mediante el cual es capaz de coger la placa de cristal (4) para colocarla y retirarla respecto del escáner (2).
En relación con el pulsador de accionamiento del escáner (2) va dispuesto también un actuador (17), el cual acciona a dicho pulsador del escáner (2) para activar las operaciones de escaneado, pudiendo ir dicho actuador (17) sobre el propio robot manipulador (3), o en cualquier otra disposición de soporte que le mantenga enfrentado al pulsador de accionamiento del escáner (2).
Con todo ello así, para el escaneado de un paquete de documentos (15), éstos se disponen en el almacén (1.1) y, una así, solo es necesario poner en marcha el conjunto funcional del robot manipulador (3), el cual desplaza al conjunto de los brazos (7 y 8) hasta la zona en la que se encuentra la placa de cristal (4), cogiendo con el sistema de garras (16) del brazo (8) a dicha placa de cristal (4).
Tras coger la placa de cristal (4), el conjunto de los brazos (7 y 8) se desplaza hasta el almacén (1.1), en donde mediante el sistema de vacío (14) del brazo (7) coge el documento (15) que se halla en la parte superior del paquete almacenado para escanear, llevando a dicho documento (15) cogido, hasta el escáner (2), en donde le deposita sobre la pantalla de escaneado, efectuando después el conjunto de los brazos (7 y 8) otro movimiento para colocar la placa de cristal (4) sobre el documento (15) situado en la pantalla de escaneado.
A continuación se retira el conjunto de los brazos (7 y 8), moviendo entonces el actuador (6) a la tapa (5) a la posición de cierre, y el actuador (17) acciona al pulsador de activación del escáner (2), con lo cual se produce el escaneado del documento (15) situado para escanear.
Una vez realizada la operación del escaneado, el actuador (6) levanta la tapa (5) del escáner (2) a la posición de apertura y el conjunto del los brazos (7 y 8) del robot manipulador (3) se desplaza para coger, con sucesivos movimientos, primero a la placa de cristal (4) y después al documento (15) escaneado, llevando a dicho documento (15) escaneado hasta el almacén (1.2), en donde le deposita, para a continuación volver a coger otro documento (15) del paquete dispuesto en el almacén (1.1), repitiéndose todas las operaciones para el escaneado del nuevo documento (15) y, así, sucesivamente con cada uno de los documentos (15) dispuestos en el paquete del almacén (1.1) para escanear.
Los almacenes (1.1 y 1.2) están provistos con unos topes laterales fijos (18) y enfrentados a ellos unos topes regulables (19), permitiendo adaptar dichos almacenes (1.1 y 1.2) para documentos (15) de diferentes dimensiones, dentro de la gama de dimensiones que admita la pantalla de escaneado del escáner (2).
En una disposición de aplicación, el conjunto componente del alimentador automático, junto con el escáner...
Reivindicaciones:
1. Alimentador automático para escáner, destinado para colocar y retirar, respecto de un escáner (2), los documentos (15) a escanear, caracterizado porque consta de un conjunto de almacén (1) que comprende dos almacenes (1.1 y 1.2), uno de ellos destinado para colocar en él los documentos (15) a escanear y el otro para recoger en él los documentos (15) escaneados, disponiéndose en relación con dicho conjunto de almacén (1) y con el escáner (2) de aplicación un robot manipulador (3) que es capaz de llevar los documentos (15) desde el almacén (1.1) hasta el escáner (2) y desde éste hasta el almacén (1.2), así como colocar y retirar una placa de cristal (4) que se dispone sobre los documentos (15) en la pantalla de escaneado, yendo en relación con la tapa (5) del escáner (2) un actuador (6) que opera el movimiento de dicha tapa (5) entre las posiciones de cierre y apertura, mientras que en relación con el pulsador de accionamiento del escáner (2) se dispone un actuador (17) que acciona a dicho pulsador.
2. Alimentador automático para escáner, de acuerdo con la primera reivindicación, caracterizado porque el robot manipulador (3) consta de dos brazos (7 y 8) asociados en una unidad de movimiento conjunto, con posibilidad de desplazamiento vertical sobre respectivas columnas (9 y 10) mediante accionamiento por un motor reductor (11) y de desplazamiento horizontal a lo largo de una guía (12) longitudinal mediante un motor reductor (13), yendo provisto un brazo (7) con un sistema de vacío (14) para coger los documentos (15), mientras que el otro brazo (8) posee un sistema de garras (16) para coger la placa de cristal (4).
3. Alimentador automático para escáner, de acuerdo con la primera reivindicación, caracterizado porque los almacenes (1.1 y 1.2) poseen unos topes laterales fijos (18), frente a los cuales van dispuestos unos topes regulables (19) que permiten la adaptación de dichos almacenes (1.1 y 1.2) para documentos (15) de diferentes dimensiones.
4. Alimentador automático para escáner, de acuerdo con la primera reivindicación, caracterizado porque el conjunto del alimentador, junto con el escáner (2) de aplicación, se colocan dentro de una carcasa de protección (20), disponiéndose hacia el exterior una consola (21) de control.
Patentes similares o relacionadas:
Dispositivo de agarre de hojas de encarte, dispositivo de carga, estación de recepción de las intercalaciones y máquina de procesamiento de elementos en forma de hojas, del 6 de Mayo de 2020, de BOBST MEX SA: Dispositivo de agarre de hojas de encarta para dispositivo de carga de hojas de encarte de una estación de recepción de las intercalaciones , incluyendo […]
Un dispositivo de colocación en coincidencia o registrador, una máquina de procesamiento y un método para colocar elementos en forma de placa, del 19 de Febrero de 2020, de BOBST MEX SA: Un registrador para una máquina de procesamiento para procesar elementos en forma de placa que comprende: - un elemento […]
Dispositivo para retirar productos planiformes de una pila, del 19 de Febrero de 2020, de BEUMER Group GmbH & Co. KG: Dispositivo para retirar productos planiformes de una pila , con un distribuidor para alojar una pila de productos planiformes , […]
MÁQUINA FORMADORA DE CAJAS POR DOBLADO Y ENCOLADO CON ALIMENTADOR DE PLANCHAS DE MATERIAL LAMINAR, Y MÉTODO DE FORMACIÓN DE CAJAS DE MATERIAL LAMINAR, del 30 de Enero de 2020, de TELESFORO GONZALEZ MAQUINARIA SLU: Máquina formadora de cajas por doblado y encolado con alimentador de planchas (P) de material laminar, y método para la formación de cajas de material laminar. El alimentador […]
Dispositivo de separación, dispositivo separador para un dispositivo de separación y método para operar un dispositivo de separación, del 8 de Enero de 2020, de MAYR-MELNHOF KARTON AG: Dispositivo de separación para separar una pila de hojas de papel o de cartón , con al menos un dispositivo separador , mediante el […]
Aparato y procedimiento para separar y desplazar de forma repetida la bolsa de más arriba de una pila de bolsas, del 4 de Diciembre de 2019, de Premier Tech Technologies Ltée: Aparato para separar y desplazar repetidamente una bolsa de más arriba de una pila de bolsas que incluye una segunda bolsa de más arriba situada […]
Dispositivo y procedimiento para encajar bolsas con válvula, del 24 de Julio de 2019, de BEUMER Group GmbH & Co. KG: Dispositivo de suministro y encaje de bolsas con válvula en total a lo largo de un sentido de transporte rectilíneo sobre una boquilla de llenado de una máquina […]
Dispositivo de suministro de bolsas, del 10 de Julio de 2019, de TOYO JIDOKI CO., LTD.: Un dispositivo de suministro de bolsas , usado en una máquina rotatoria de embalaje de llenado de bolsas equipada con una pluralidad de parejas de agarradores intermitentemente […]