ROBOT DE ALMACÉN DE ZAPATERIA.
1. Robot de almacén de zapatería, de los utilizados para la manipulación de objetos en almacenes caracterizado por un bastidor (1) donde se ubican los elementos motrices,
los dispositivos para el movimiento de traslación y los dispositivos que permiten su correcta alineación; un bastidor superior (2) donde finaliza la columna de desplazamiento vertical y susceptible de albergar los componentes que permiten la correcta alineación del robot; un armario donde se emplazan los dispositivos de control y protección de la alimentación eléctrica (3), una columna de desplazamiento vertical (4) para permitir el movimiento de objetos en el sentido deseado, un bastidor de desplazamiento vertical (5) instalado sobre dicha columna para el desplazamiento en el sentido referido dotado de elementos de extracción (6) formados por brazos o pinzas telescópicas (6) o cualquier otro elemento de manipulación de objetos y un dispositivo motriz (7) que posibilite los movimiento de traslación, elevación y rotación, en su caso.2. Robot de almacén de zapatería según reivindicación primera, caracterizado porque la alimentación eléctrica (3) será susceptible de ser por cable, por guías de electrificación u otras formas.3. Robot de almacén de zapatería según reivindicación primera, caracterizado porque el bastidor inferior es susceptible de alojar un motor lineal (10).4. Robot de almacén de zapatería según reivindicación primera, caracterizado porque la cuna con bandeja (8) es susceptible de ser telescópica.5. Robot de almacén de zapatería según reivindicación primera, caracterizado porque los brazos telescópicos (6) son susceptibles de tener ventosas.6. Robot de almacén de zapatería según reivindicación primera, caracterizado por contener dispositivos de venta electrónica o automática.7. Robot de almacén de zapatería según reivindicación primera, caracterizado por disponer de dispositivos de comunicación tales como internet, telefonía móvil u otros para la comunicación con el vendedor.8. Robot de almacén de zapatería según reivindicación primera, caracterizado por disponer de dispositivos de lectura de códigos de barras
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201100295.
Solicitante: DIAZ MATESANZ, NIEVES
RAMIREZ PEREZ, MANUEL.
Nacionalidad solicitante: España.
Provincia: CÁDIZ.
Inventor/es: DIAZ MATESANZ,NIEVES, RAMIREZ PEREZ,MANUEL.
Fecha de Solicitud: 17 de Marzo de 2011.
Fecha de Publicación: .
Fecha de Concesión: 22 de Septiembre de 2011.
Clasificación PCT:
- B65H29/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65H MANIPULACION DE MATERIALES DELGADOS O FILIFORMES, p. ej. HOJAS, BANDAS, CABLES. › B65H 29/00 Entrega o avance de los artículos a la salida de las máquinas; Avance de los artículos hacia las pilas o cuando ya están en ellas (unión, colocación o agrupación de artículos B65H 39/00; combinaciones de operaciones de apilado y de sacado de artículos que presentan otro interés que la operación individual de apilado o de sacado de artículos B65H 83/00; recirculación de artículos B65H 85/00; para artículos que no están definidos por la nota (3) (i) de la presente subclase, ver B65G). › por pinzas mecánicas solamente en contacto con el borde de ataque de los artículos.
Fragmento de la descripción:
Robot de almacén de zapatería.
Objeto de la invención
La presente invención, según se expresa en el enunciado de esta memoria descriptiva, hace referencia a un robot para almacén de zapatería, el cual introduce las siguientes ventajas:
• Es innecesaria la presencia humana, dado que un robot se encarga de recepcionar las cajas de zapatos y ubicarlas en las baldas siguiendo un orden preestablecido mediante programación o software.
• Se evitan los accidentes más comunes en almacenes: golpes y caídas al mismo nivel.
• Se optimiza el espacio útil del almacén y se incrementa el espacio de exposición y ventas.
• Se elimina el desorden característico de los almacenes, sobre todo en los periodos donde la venta es muy elevada.
• Se mejora la atención al público, dado que los empleados no tienen que desplazarse hasta el almacén. El empleado mediante el código asignado solicitará al robot el zapato requerido. Una vez localizada la caja, el robot la cogerá y la conducirá hasta el punto de venta mediante una cinta transportadora, elevador o elemento similar.
• Se reduce el tiempo de espera del cliente, al ser el robot más rápido que un empleado.
• Las ventas pueden realizarse durante 24 horas al día los 365 días del año mediante dispositivos de venta electrónica.
Antecedentes
Los antecedentes de la presente invención se encuentran en los robots existentes para la automatización de farmacias. Las diferencias principales de la invención respecto a los robots de farmacia son:
• Cambia el tipo de producto tanto por el uso como por el peso y dimensiones.
• El tamaño de los almacenes de zapatería es muy superior al de una farmacia.
• Los zapatos, a diferencia de los medicamentos, son probados por el cliente en el establecimiento hasta encontrar el número y modelo que más se ajusta a sus necesidades. Esta característica facilita la aparición de desorden en el almacén de una zapatería.
• En los almacenes de las zapaterías el flujo de productos es bidireccional: las cajas de zapatos circulan del almacén al vendedor y del vendedor al almacén si los zapatos no son vendidos. En las farmacias el flujo solo tiene una dirección: del almacén al farmacéutico, al ser las devoluciones mucho menos probables que en una zapatería.
• La actividad de las zapaterías, y por ende de su almacén, se incrementa de modo superlativo durante ciertas épocas del año (navidades y rebajas, principalmente). En las farmacias no se produce este fenómeno.
• Los argumentos de venta en las zapaterías son diferentes de los empleados en farmacias.
Facilitar el marketing es una de las características de la invención.
Como consecuencia de las diferencias descritas el robot de la invención deberá manipular cajas de mayor peso y dimensiones pudiendo llegar a ser el ritmo de trabajo muy superior al característico de una farmacia. Estas factores también afectan a los elementos que comunican el robot de zapatería con el vendedor tales como los elevadores, cintas transportadoras y otros.
Descripción de la invención
La invención representa una forma nueva de ordenar y gestionar el almacén de una zapatería sin recurrir a la presencia humana. Así mismo, existe un contacto directo entre el empleado y el robot lo que supone una forma nueva de vender en el sector de la zapatería. Además, puede hacerse extensible a cualquier campo del ámbito textil, siempre y cuando las prendas de vestir estén alojadas en cajas o en cualquier otro elemento que pueda ser manipulado por el robot.
En la invención el robot (o conjunto de ellos de hubiese más de uno) puede comunicarse con los empleados de la zapatería por cualquiera medio que permita la tecnología: teclado, ratón, pantalla táctil, teléfono móvil o cualquier otro elemento similar. El robot podrá desplazarse mediante ruedas, guías, raíles o cualquier otro dispositivo que permita su movimiento. Las guías o raíles podrán ubicarse en el suelo, techo o en ambos al unísono. El robot podrá desplazarse en los sentidos delante-atrás, derecha-izquierda, arriba-abajo, y de ser necesario por razones de optimización o características del almacén, en cualquier dirección dentro de un espacio tridimensional. Así mismo, el robot, su brazo o ambos, podrán girar en sentido horario-antihorario en cualquiera de las tres direcciones del espacio siempre y cuando sea necesario para cumplir su labor con mayor eficacia. El brazo del robot (dotado de utillaje para su labor), caso de ser necesario, podrá desplazarse mediante movimiento articulado, de extensión-retracción o ejerciendo cualquier otro que se estime útil.
El modo de realización de la invención tiene su fundamento en el robot de farmacia, el cual mediante un brazo dotado de utillaje en forma de pinzas, recoge las cajas y las ubica en una bandeja autoportante para su desplazamiento hasta el punto de entrega. El robot de almacén de zapatería podría utilizar como utillaje pinzas, ventosas o cualquier otro elemento compatible con la manipulación de cajas.
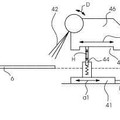
El modo de realización de la invención consistiría en un robot adaptado a las dimensiones de un almacén de zapatería con las siguientes partes: un bastidor inferior sobre el que emplazar los elementos motrices (motor lineal o convencional) y de traslación, una columna de desplazamiento vertical con base en el bastidor inferior, una cuna con bandeja y elementos de extracción y manipulación de las cajas instaladas en la columna de desplazamiento vertical, un bastidor superior en el extremo final de la columna con elementos para la correcta alienación del robot (como por ejemplo ruedas de contraste) y un armario para ubicar los dispositivos eléctricos de control y protección.
Para poder realizar su trabajo con eficacia el robot recibirá información de los siguientes elementos:
- lector/es de códigos de barra o cualquier otro sistema que permita leer la información contenida en las cajas con el fin de permitir su almacenamiento y venta
- sensores necesarios para el desplazamiento del robot y de las partes del mismo, así como para la localización y manipulación de las cajas de zapatos
- ordenador/es que permitan gestionar los datos y programas necesarios para su funcionamiento
- elementos de comunicación inalámbrica mediante cualquier dispositivo de antenas, red wifi, o cualquier otro desarrollado por la tecnología, o en su defecto mediante cableado
- software o programa informático para el funcionamiento del robot
- elementos para introducir información en el dispositivo tales como teclado, ratón pantalla táctil, teléfono móvil o cualquier otro que permita la tecnología
- elementos para recibir información del dispositivo tales como la pantalla de un ordenador, teléfono móvil o cualquier otro que permita la tecnología.
Por otro lado, para que la comunicación entre el robot y el vendedor sea bidireccional se utilizaran
elementos que permitan la entrada y salida del almacén de las cajas de zapatos, tales como elevadores, cintas transportadoras o cualquier otro elemento que posibilite esta acción.
A continuación describimos el funcionamiento de la invención:
1) Recepción de la carga
Esta etapa consiste en introducir las cajas de zapatos en el almacén con el fin de ubicarlas en las baldas o espacios correspondientes según un criterio de organización. Antes de que el robot emplace las cajas en las baldas o espacios habilitados es necesario realizar su escaneado. Este procedimiento puede ser acometido de diversas maneras:
A) modo semiautomático: el empleado escanea cada caja de zapatos mediante un lector de códigos de barras o cualquier otro sistema que permita la tecnología. Cada caja, una vez ha sido escaneada, es colocada en una cinta transportadora, elevador o cualquier otro sistema que permita su desplazamiento hasta el almacén.
B) modos automáticos:
a) El escaneado se produce de forma automática una vez la caja ha sido situada en una cinta transportadora, elevador o cualquier otro sistema que permita su desplazamiento hasta el almacén.
b) El escaneado es realizado por el robot antes de ubicarlas en las baldas o espacios correspondientes.
Una vez las cajas han sido escaneadas por procedimiento automático o semiautomático...
Reivindicaciones:
1. Robot de almacén de zapatería, de los utilizados para la manipulación de objetos en almacenes caracterizado por un bastidor (1) donde se ubican los elementos motrices, los dispositivos para el movimiento de traslación y los dispositivos que permiten su correcta alineación; un bastidor superior (2) donde finaliza la columna de desplazamiento vertical y susceptible de albergar los componentes que permiten la correcta alineación del robot; un armario donde se emplazan los dispositivos de control y protección de la alimentación eléctrica (3), una columna de desplazamiento vertical (4) para permitir el movimiento de objetos en el sentido deseado, un bastidor de desplazamiento vertical (5) instalado sobre dicha columna para el desplazamiento en el sentido referido dotado de elementos de extracción (6) formados por brazos o pinzas telescópicas (6) o cualquier otro elemento de manipulación de objetos y un dispositivo motriz (7) que posibilite los movimiento de traslación, elevación y rotación, en su caso.
2. Robot de almacén de zapatería según reivindicación primera, caracterizado porque la alimentación eléctrica (3) será susceptible de ser por cable, por guías de electrificación u otras formas.
3. Robot de almacén de zapatería según reivindicación primera, caracterizado porque el bastidor inferior es susceptible de alojar un motor lineal (10).
4. Robot de almacén de zapatería según reivindicación primera, caracterizado por que la cuna con bandeja (8) es susceptible de ser telescópica.
5. Robot de almacén de zapatería según reivindicación primera, caracterizado por qué los brazos telescópicos (6) son susceptibles de tener ventosas.
6. Robot de almacén de zapatería según reivindicación primera, caracterizado por contener dispositivos de venta electrónica o automática.
7. Robot de almacén de zapatería según reivindicación primera, caracterizado por disponer de dispositivos de comunicación tales como internet, telefonía móvil u otros para la comunicación con el vendedor.
8. Robot de almacén de zapatería según reivindicación primera, caracterizado por disponer de dispositivos de lectura de códigos de barras.
Patentes similares o relacionadas:
 Dispositivo de frenado de pliego, del 13 de Junio de 2013, de HEIDELBERGER DRUCKMASCHINEN AKTIENGESELLSCHAFT: Dispositivo de frenado de pliego para máquina troqueladora de pliego y/o de estampación para elfrenado de pliego de papel, cartón y similares, en […]
Dispositivo de frenado de pliego, del 13 de Junio de 2013, de HEIDELBERGER DRUCKMASCHINEN AKTIENGESELLSCHAFT: Dispositivo de frenado de pliego para máquina troqueladora de pliego y/o de estampación para elfrenado de pliego de papel, cartón y similares, en […]
PROCEDIMIENTO Y DISPOSITIVO DE TRANSPORTE DE OBJETOS EN ESSTADO SUSPENDIDO EN UNA VIA DE TRANSPORTE QUE COMPRENDE UNA RESERVA DE ACUMULALCION., del 16 de Noviembre de 2004, de FERAG AG: Procedimiento para el transporte y retención de objetos , mediante una pluralidad de elementos de sujeción , que se pueden desplazar […]
SISTEMA DE TRATAMIENTO PARA TRATAR OBJETOS., del 1 de Abril de 2004, de FERAG AG: Sistema de proceso o tratamiento para el proceso o tratamiento de grandes cantidades de objetos esencialmente iguales o al menos similares, […]
DISPOSITIVO PARA EL SUMINISTRO DE PRODUCTOS DE ARTES GRAFICAS A UN LUGAR DE DISTRIBUCION., del 16 de Febrero de 2004, de FERAG AG: EN UNA ESTACION DE SUMINISTRO SE DESENROLLAN PRODUCTOS DE IMPRENTA DE UNA BOBINA DE PRODUCTOS Y SE TRASLADAN A UN PUNTO DE ENTREGA DE UN SISTEMA DE TRANSPORTE […]
PROCEDIMIENTO Y DISPOSITIVO PARA ALMACENAMIENTO DE MEDIOS DE TRANSPORTE., del 1 de Julio de 2003, de FERAG AG: Procedimiento para el almacenamiento de medios de transporte provistos con cucharones para el soporte de productos, en especial productos planos, que se pueden […]
TRANSPORTADOR PARA SER GUIADO POR CARRILES Y CARRIL DE GUIDADO PARA CONDUCIR EL TRANSPORTADOR., del 1 de Julio de 2003, de FERAG AG: Transportador para ser guiado por carriles, para el transporte en particular de productos planos en una dirección (F) de transporte que comprende un elemento […]
DISPOSITIVO PARA APORTAR PRODUCTOS DE IMPRENTA A ESTACIONES DE TRATAMIENTO., del 1 de Enero de 2003, de FERAG AG: EL DISPOSITIVO DE TRANSPORTE PRESENTA UNA LINEA DE TRANSPORTE PRINCIPAL DE CIRCUITO CERRADO, VARIAS LINEAS DE ALIMENTACION (14, 14') CONFIGURADAS […]
Dispositivo para la recogida y/o entrega de productos planos., del 16 de Octubre de 2002, de FERAG AG: Dispositivo para la recogida y/o entrega realizada por medio de pinzas (1, 1') individuales de productos laminares, en particular productos de impresión, con […]