DECODIFICACIÓN DE MENSAJES DE RÁDAR SECUNDARIO.
Procedimiento para decodificar una señal SSR en Modo S, en el que una señal recibida se muestrea repetidamente a lo largo del período de un bit,
los valores de las muestras se ponderan conforme a una función de ponderación predeterminada y se suman a fin de proporcionar una señal decodificada para dicho bit, y en el que la función de ponderación predeterminada depende de una función de densidad de probabilidad de la señal, obtenida a partir de las medidas de las características de la señal a lo largo del período temporal del preámbulo del mensaje SSR en Modo S y esencialmente ajustando la decodificación a las características de la distribución de amplitud de la señal recibida
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2005/000865.
Solicitante: RAYTHEON SYSTEMS LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: THE PINNACLES, ELIZABETH WAY HARLOW ESSEX CM19 5BB REINO UNIDO.
Inventor/es: Stevens,Martin,Raytheon Systems Limited, Jones,Quenton,Raytheon Systems Limited.
Fecha de Publicación: .
Fecha Solicitud PCT: 8 de Marzo de 2005.
Clasificación Internacional de Patentes:
- G01S13/76D
- G01S13/78B2
- G01S13/78B3
- G01S7/28K
Clasificación PCT:
- G01S13/78 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › discriminando entre diferentes clases de blancos, p. ej. identificación amigo-enemigo (radar-IFF) (G01S 13/75, G01S 13/79 tiene prioridad).
Clasificación antigua:
- G01S13/78 G01S 13/00 […] › discriminando entre diferentes clases de blancos, p. ej. identificación amigo-enemigo (radar-IFF) (G01S 13/75, G01S 13/79 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2356921_T3.pdf



Fragmento de la descripción:
La presente invención se refiere al campo de los receptores radar secundarios.
El radar secundario se emplea para obtener elementos de información codificados procedentes de vehículos de transporte cooperantes equipados con transpondedores, sobre la identidad del portador, así como información adicional. 5
Los transpondedores emiten una respuesta tras la recepción de una interrogación y asimismo pueden transmitir espontáneamente en un modo de funcionamiento con direccionamiento selectivo, denominado funcionamiento en Modo S. Por este motivo, es preciso dotar al radar secundario de unos medios que permitan el reconocimiento de dichas respuestas, entre todas las respuestas recibidas, que constituyen las respuestas a sus propios mensajes de interrogación, y una vez detectadas, decodificarlas y validar el código de la respuesta. 10
Tal como queda estipulado en los estándares de la Organización de Aviación Civil Internacional (ICAO), una respuesta en Modo S está constituida por un tren de impulsos emitidos a una frecuencia portadora de 1090 MHz. todo tren de impulsos comprende un preámbulo y un bloque de datos.
El preámbulo presenta cuatro impulsos idénticos, cada uno de ellos de duración nominal de 0,5 microsegundos. Los primeros dos impulsos están separados 0,5 microsegundos de los dos últimos impulsos. La separación entre el primer 15 impulso y el tercer impulso es de 3,5 microsegundos.
El mensaje o bloque de datos puede ser corto o largo. Un mensaje corto comprende 56 impulsos, cada uno de ellos de 0,5 microsegundos. Si se trata de un mensaje largo, comprende 112 de dicho tipo de impulsos. La modulación de mensaje se realiza mediante la posición de los impulsos que se pueden encontrar en la primera mitad o en la segunda mitad de intervalos de I microsegundos. Algunos de los impulsos se combinan, de modo que su duración nominal es de 20 un microsegundo, por ejemplo en el caso de que exista una secuencia de código “01” en el mensaje de respuesta SSR (Radar secundario de vigilancia). El primero de dichos intervalos empieza 8 microsegundos tras el inicio del preámbulo.
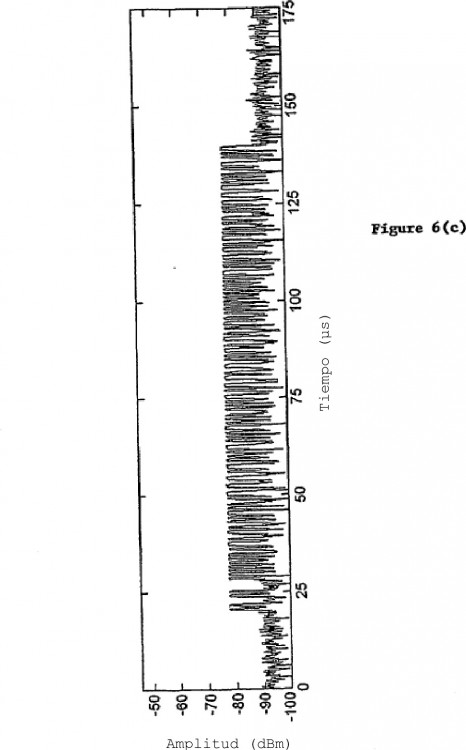
Una respuesta secundaria está formada por un tren de impulsos. El flanco anterior de cada impulso se diseña de modo que en un período de 50 nanosegundos se alcance el 90% del nivel máximo de potencia. Dicho impulso comprende una meseta cuyo valor se corresponde con el nivel de potencia, y un flanco posterior. La diferencia temporal entre un punto 25 del flanco anterior y un punto del flanco posterior de modo que se obtenga un nivel de potencia igual al 50% de la potencia máxima del impulso es de 0,45 microsegundos ± 0,1 microsegundos.
Existe una técnica de vigilancia, relacionada con el Modo S, que se conoce como ADS-B, en la que una aeronave es susceptible de transmitir espontáneamente información, por ejemplo una posición que haya medido, empleando satélites u otros medios de navegación adicionales, codificada en un conjunto de mensajes del Modo S. 30
Cabe esperar que las respuestas del Modo S, las transmisiones espontáneas del Modo S, los modos de vigilancia tales como el ADS-B, así como otras aplicaciones de la banda 1090 MHz, conduzcan a un incremento notable de los mensajes en el futuro. Actualmente, no existe una solución satisfactoria para garantizar que el receptor reciba únicamente un mensaje en cualquier momento. El concepto de "recepción ininteligible" (garbling) se emplea para referirse a escenarios en los en los que existe más de un mensaje en el receptor en un momento dado. Un mensaje 35 queda “mutilado” cuando durante su recepción existen uno o más mensajes adicionales que coinciden o bien empiezan y acaban durante el período temporal de dicho mensaje. Empleando métodos de decodificación convencionales, dicho efecto provoca una proporción creciente elevada de mensajes ininteligibles, por lo que se limita la capacidad del sistema, ya que se sabe que los métodos de decodificación actuales adolecen de una capacidad limitada para tratar el efecto de la recepción ininteligible. 40
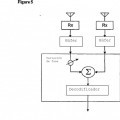
Los procesos de recepción empleados para recibir las señales SSR se emplean típicamente para recibir la señal de respuesta a 1090 MHz, utilizándose un mezclador para pasarla a una frecuencia intermedia antes de detectar la envolvente de la señal, obteniéndose una señal de tensión que representa el logaritmo de la amplitud de la envolvente en función del tiempo. Los radares SSR de monoimpulsos proporcionan asimismo una señal que representa la desviación angular de una señal, respecto al centro del haz principal que señala la dirección de llegada, siempre y 45 cuando exista únicamente una señal en recepción. El ancho de banda de ruido del canal de tensión es típicamente de 8 MHz y habitualmente no se emplean técnicas de filtro de adaptación.
El documento US2003/0200490 describe un dispositivo de procesado de datos para recibir un flujo de datos distorsionado y capaz de generar una estimación del flujo de datos original, no distorsionado.
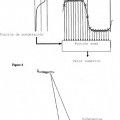
En una técnica bien conocida de decodificación, para las señales de modo S, empleando los procesos de recepción 50 descritos anteriormente, se detecta la posición de los bits del preámbulo, se fija una posición de muestreo, y se toman dos muestras para cada período de un bit, tal como se representa por ejemplo en el bit de la figura 1. Comparando la magnitud de dichas muestras, se puede tomar una decisión para el bit, en el sentido de si se trata de un 0 o de un 1. Una proporción grande entre ambas magnitudes implica una probabilidad elevada de decisión correcta. Este método es susceptible de estar sujeto a interferencias, ya que la mutilación en el momento del muestreo provoca frecuentemente la 55 toma de una decisión incorrecta. Dicho método no es apto para el Modo S con ADS-B, excepto para densidades de tráfico muy pequeñas.
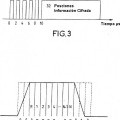
En el dominio público se ha definido un nuevo algoritmo a fin de mejorar la posibilidad de decodificar una señal en presencia de recepción ininteligible (garbling). Dicho algoritmo se ha descrito en los estándares de Capacidad Operacional Mínima para la Técnica de vigilancia dependiente automática en modo "1090 Mhz Extended Squitter" con radiodifusión (ADS-B) y Servicios de Información del Tráfico con radiodifusión (TIS-B), RTCADO-260A, anexo I, RTCA Inc 2003. El principio de funcionamiento de dicho algoritmo se representa en la figura 2. Se emplea una frecuencia de 5 muestreo más elevada que en el caso de las técnicas convencionales, de modo que se obtienen 10 muestras en un período de un bit de 1 microsegundo. Las muestras se categorizan en una de las cuatro bandas de amplitud determinadas por el análisis del preámbulo del Modo S, codificadas en 2 bits. A partir de los 20 bits formados, se puede acceder a una tabla de referencias con las 220 combinaciones para leer el estado y los niveles de confianza del bit.
Dicha técnica presenta una mejora en comparación con la técnica original descrita en la figura 1, ya que se emplea más 10 información de la señal para tomar una decisión, de modo que se puede tolerar un grado más elevado de distorsión antes de incurrir en errores. Sin embargo, no permite la separación entre la señal requerida y la señal de distorsión.
Se describen técnicas adicionales en el documento US6094169, que emplea un enfoque basado en el posicionamiento hiperbólico a fin de medir las diferencias temporales entre respuestas en múltiples estaciones de recepción, el documento US5063386, que describe un método de reducción por trayectorias múltiples y reducción de la distorsión 15 empleando técnicas de histograma, y el documento US5406288, que describe un método de muestreo y sincronización para reducir la probabilidad de un mensaje ininteligible.
Con el objetivo de separar las señales mutiladas, se han sugerido soluciones basadas en super-resolución. El documento WO02482121 describe la aplicación de la pequeña diferencia frecuencial existente entre las frecuencias portadoras recibidas de las señales distorsionadas. Dicha diferencia frecuencial se debe a los errores al establecer la 20 frecuencia portadora del enlace descendente, y asimismo al efecto Doppler de las señales recibidas. La fuente de referencia de la frecuencia de transmisión del enlace descendente es típicamente un oscilador de cristal, y su precisión es del orden de una parte por millón o peor. La desviación por efecto Doppler se encuentra aproximadamente en el rango de ± 1 kHz para tráfico aéreo civil a 1090 MHz. El tiempo de observación de un único... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para decodificar una señal SSR en Modo S, en el que una señal recibida se muestrea repetidamente a lo largo del período de un bit, los valores de las muestras se ponderan conforme a una función de ponderación predeterminada y se suman a fin de proporcionar una señal decodificada para dicho bit, y en el que la función de ponderación predeterminada depende de una función de densidad de probabilidad de la señal, obtenida a partir de las medidas de las características de la señal a lo largo del período temporal del preámbulo del mensaje SSR en Modo S y 5 esencialmente ajustando la decodificación a las características de la distribución de amplitud de la señal recibida.
2. Procedimiento según la reivindicación 1, en el que la función de ponderación se diseña de tal modo que la polaridad de la señal decodificada denota la presencia o ausencia de un impulso digital.
3Procedimiento según la reivindicación 2, en el que la función de ponderación se diseña de tal modo que la magnitud de la señal decodificada proporciona una medida de la fiabilidad real de la presencia o ausencia de un impulso digital, 10 obtenida a partir de la polaridad de la señal decodificada.
3. Procedimiento según la reivindicación 2, en el que valores de la señal decodificada correspondientes a los bits que forman un mensaje SSR se combinan y se verifica la suma de comprobación integrada en el mensaje, y de modo que los valores de la señal decodificada se empleen en caso de una discrepancia para identificar uno o más bits que presenten una baja fiabilidad, y se efectúe una corrección para satisfacer la suma de comprobación, para ello 15 modificando la polaridad de cada uno de los valores de la señal decodificada.
4. Procedimiento según cualquiera de las reivindicaciones anteriores, en el que el número de muestras de cada período del bit se acerca al número efectivo máximo determinado por el teorema de muestreo de Nyquist, con el objetivo de extraer una información esencialmente completa.
5. Procedimiento según cualquiera de las reivindicaciones anteriores, en el que la señal recibida comprende por lo 20 menos dos señales enmascaradas entre sí, y de modo que dicho procedimiento comprende adicionalmente la recepción de la señal en dos o más antenas, la señal recibida de una antena combinándose con una señal recibida con una cierta variación de fase de una o más antenas adicionales, dicha variación de fase seleccionada a fin de eliminar una de las dos señales mutiladas, de modo que la otra se pueda decodificar.
6. Procedimiento según cualquiera de las reivindicaciones 1 a 5, en el que la señal recibida comprende por lo menos 25 dos señales enmascaradas entre sí y en el que el ajuste del modelo se emplea con el objetivo de separar las señales mutiladas existentes en un único canal y luego poder decodificarlas.
7. Aparato para decodificar una señal SSR en Modo S, que comprende medios para muestrear una señal recibida repetidamente a lo largo del período de un bit, y medios para sumar los valores de las muestras ponderados conforme a una función de ponderación predeterminada a fin de proporcionar una señal decodificada para dicho bit, y en el que la 30 función de ponderación predeterminada depende de una función de densidad de probabilidad de la señal, obtenida a partir de las medidas de las características de la señal a lo largo del período temporal del preámbulo del mensaje SSR en Modo S y esencialmente ajustando la decodificación a las características de la distribución de amplitud de la señal recibida.
8. Aparato según la reivindicación 8, en el que la función de ponderación se diseña de tal modo que la polaridad de la 35 señal decodificada denota la presencia o ausencia de un impulso digital.
9. Aparato según la reivindicación 9, en el que la función de ponderación se diseña de tal modo que la magnitud de la señal decodificada proporciona una medida de la fiabilidad real de la presencia o ausencia de un impulso digital, obtenida a partir de la polaridad de la señal decodificada.
10. Aparato según la reivindicación 9, que comprende unos medios para combinar los valores de la señal decodificada 40 correspondientes a los bits que forman un mensaje SSR y verificar la suma de comprobación integrada en el mensaje, y unos medios para emplear los valores de la señal decodificada en caso de una discrepancia a fin de identificar uno o más bits que presenten una baja fiabilidad, y se intente efectuar una corrección para satisfacer la suma de comprobación, para ello modificando la polaridad de cada uno de los valores de la señal decodificada.
11. Aparato según cualquiera de las reivindicaciones 8 a 11, en el que los medios para muestrear la señal recibida se 45 diseñan de tal modo que el número de muestras de cada período del bit se acerca al número efectivo máximo determinado por el teorema de muestreo de Nyquist, con el objetivo de extraer una información esencialmente completa.
12. Aparato según cualquiera de las reivindicaciones 8 a 12, adaptado asimismo para decodificar una señal recibida que comprende por lo menos dos señales enmascaradas entre sí, y de modo que dicho aparato comprenda adicionalmente dos o más antenas en las que se reciben las señales enmascaradas, y unos medios para combinar la señal recibida de 50 una antena con una señal recibida con una cierta variación de fase de una o más antenas adicionales, dicha variación de fase seleccionada a fin de eliminar una de las dos señales mutiladas, de modo que la otra se pueda decodificar.
13. Aparato según cualquiera de las reivindicaciones 8 a 12, adaptado asimismo para decodificar una señal recibida que comprende por lo menos dos señales enmascaradas entre sí y en el que el ajuste del modelo se emplea con el objetivo de separar las señales mutiladas existentes en un único canal y luego poder decodificarlas. 55
Patentes similares o relacionadas:
 ASOCIACION BASADA EN LA DISTANCIA, del 15 de Marzo de 2010, de QUALCOMM INCORPORATED: Un aparato para realizar una operación basándose en la distancia, que comprende:
medios de generación de una indicación relativa a […]
ASOCIACION BASADA EN LA DISTANCIA, del 15 de Marzo de 2010, de QUALCOMM INCORPORATED: Un aparato para realizar una operación basándose en la distancia, que comprende:
medios de generación de una indicación relativa a […]
 DISPOSITIVO RADIOELÉCTRICO BIESTÁTICO PARA REALIZAR UNA BARRERA DE DETECCIÓN DE INTRUSIONES, del 23 de Febrero de 2011, de THALES: Barrera de detección radioeléctrica biestática que comprende medios para emitir al menos una onda a través de una antena direccional […]
DISPOSITIVO RADIOELÉCTRICO BIESTÁTICO PARA REALIZAR UNA BARRERA DE DETECCIÓN DE INTRUSIONES, del 23 de Febrero de 2011, de THALES: Barrera de detección radioeléctrica biestática que comprende medios para emitir al menos una onda a través de una antena direccional […]
 PROCEDIMIENTO Y DISPOSITIVO PARA GENERAR VARIOS CANALES EN UN SISTEMA DE TIPO IFF, del 15 de Abril de 2011, de THALES: Procedimiento de interrogación/respuesta en un sistema de comunicación de tipo IFF Modo que comprende un interrogador y un contestador, caracterizado porque - respecto […]
PROCEDIMIENTO Y DISPOSITIVO PARA GENERAR VARIOS CANALES EN UN SISTEMA DE TIPO IFF, del 15 de Abril de 2011, de THALES: Procedimiento de interrogación/respuesta en un sistema de comunicación de tipo IFF Modo que comprende un interrogador y un contestador, caracterizado porque - respecto […]
 Radar secundario con supresión de lóbulos secundarios así como método para el funcionamiento del mismo, del 26 de Junio de 2019, de HENSOLDT Sensors GmbH: Radar secundario con supresión de lóbulos secundarios para evitar una representación de objetivos falsa, que comprende:
- un primer grupo de elementos radiantes, […]
Radar secundario con supresión de lóbulos secundarios así como método para el funcionamiento del mismo, del 26 de Junio de 2019, de HENSOLDT Sensors GmbH: Radar secundario con supresión de lóbulos secundarios para evitar una representación de objetivos falsa, que comprende:
- un primer grupo de elementos radiantes, […]
Procedimiento para el posicionamiento y unidad de comunicación con un vehículo, del 5 de Junio de 2019, de CONTINENTAL TEVES AG & CO. OHG: Procedimiento para la determinación del posicionamiento mediante comunicación de vehículo-a-entorno en la banda ITS cooperativa, en donde una unidad emisora y receptora […]
SISTEMA DE VIGILANCIA PERIMETRAL DE CULTIVOS MARINOS Y SIMILARES, del 13 de Abril de 2017, de INTEO MEDIA MOBILE, S.L: El sistema está constituido a partir de uno o más nodos de detección , constituidos a partir dé un radar , un sistema procesador de imágenes […]
Radar secundario bi-función, y sistema de radar que incluye un radar de ese tipo, del 15 de Junio de 2016, de THALES: Radar secundario, caracterizado porque incluye al menos un sistema de antenas , un primer subconjunto que integra unos medios de emisión, de recepción y […]
Radar secundario de vigilancia con una gran tasa de actualización, del 15 de Junio de 2016, de THALES: Radar secundario que consta al menos de un primer subsistema (10A) y de un segundo subsistema (10B) que integran cada uno unos medios de emisión de las interrogaciones, de recepción […]