VEHICULO DE CONSTRUCCION CON UN SISTEMA PARA MEDIR LAS PROPIEDADES DE LOS MATERIALES.
Un vehículo de construcción (1) con un sistema sensor para detectar una propiedad de la capa de material (M),
en donde la capa (M) de material tiene una superficie superior (S) y un sistema sensor que comprende:
un sensor (12) configurado para detectar la propiedad del material; y
un mecanismo de posicionamiento (14) que tiene un accionador (18; 22; 26; 28) conectado con el vehículo y un miembro de conexión (16; 20; 32) que tiene un primer extremo (16a; 20a) conectado o conectable con el sensor (12) y un segundo extremo opuesto (16b; 20b) conectado con el vehículo (1) o el accionador, en donde el accionador (18; 22; 26, 28) está configurado para desplazar el primer extremo del miembro de conexión (16a; 20a) para mover el sensor (12) entre una primera posición (P1) espaciada en una substancial distancia por encima de la superficie (S) superior de la capa de material y una segunda posición (P2) situada en forma proximal hacia o sobre la superficie superior de la capa (S), siendo el sensor (12) capaz de detectar la propiedad del material al disponerlo en la segunda posición (P2);
el mecanismo de posicionamiento (14) se configura mientras que el vehículo (1) se desplaza con respecto a la capa de material (M) para desplazar secuencialmente el sensor (12) desde la primera posición (P1) a la segunda posición (P2), para permitir que el sensor (12) permanezca generalmente dispuesto en la segunda posición (P2) durante un periodo de tiempo, y desplazando el sensor (12) desde la segunda posición (P2) a la primera posición (P1) después de transcurrir el periodo de tiempo;
caracterizado porque:
tiene un circuito lógico eléctrico (40) conectado eléctricamente al accionador (18; 22; 26; 28), y configurado para generar y transmitir señales de control al accionador (18; 22; 26; 28) para operar el accionador (18; 22; 26; 28), con el fin de desplazar de forma controlable el sensor (12), entre las mencionadas primera y segunda posiciones (P1, P2), mientras que el vehículo se desplaza con respecto a la capa de material (M)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US02/29882.
Solicitante: VOLVO CONSTRUCTION EQUIPMENT AB.
Nacionalidad solicitante: Alemania.
Dirección: EUROPEAN PATENT ATTORNEYS LANDSBERGER STRASSE 300,80687 MUNCHEN.
Inventor/es: STRIDIRON,LAURA, SCOTESE,MICHAEL,J.
Fecha de Publicación: .
Fecha Concesión Europea: 3 de Marzo de 2010.
Clasificación Internacional de Patentes:
- E01C19/28G
- E01C19/48 CONSTRUCCIONES FIJAS. › E01 CONSTRUCCION DE CARRETERAS, VIAS FERREAS O PUENTES. › E01C CONSTRUCCION O REVESTIMIENTO DE CARRETERAS, CANCHAS DE DEPORTES O SIMILARES; MAQUINAS O ACCESORIOS PARA LA CONSTRUCCION O LA REPARACION (creación de carreteras o superficies similares por compactación o dispersión de la nieve o del hielo E01H). › E01C 19/00 Máquinas, herramientas o dispositivos auxiliares para preparar o repartir los materiales de revestimiento, para trabajar los materiales in situ , o para formar, consolidar o terminar el revestimiento (estabilización de la superficie E01C 21/00; aparatos especialmente diseñados para reacondicionar o reparar el revestimiento E01C 23/00). › para depositar los materiales y consolidarlos, o para terminar la superficie.
- G01N9/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › Investigación del peso específico o de la densidad de los materiales; Análisis de los materiales determinando el peso específico o la densidad.
- G01N9/24 G01N […] › G01N 9/00 Investigación del peso específico o de la densidad de los materiales; Análisis de los materiales determinando el peso específico o la densidad. › observando la propagación de la onda o de la radiación de partículas a través del material.
Clasificación PCT:
- E01C19/28 E01C 19/00 […] › Rodillos vibrantes o rodillos sometidos a percusiones, p. ej. a un martilleo (E01C 19/29 tiene prioridad).
Clasificación antigua:
- E01C19/28 E01C 19/00 […] › Rodillos vibrantes o rodillos sometidos a percusiones, p. ej. a un martilleo (E01C 19/29 tiene prioridad).
Fragmento de la descripción:
Vehículo de construcción con un sistema para medir las propiedades de los materiales.
La presente invención está relacionada con un vehículo de construcción, y más en particular con los sistemas para medir las propiedades de los materiales utilizados en los vehículos de construcción.
Ciertos vehículos de construcción, tales como las pavimentadoras asfálticas y las apisonadoras, se utilizan para formar una capa de asfalto, hormigón o materiales similares para tales aplicaciones como las carreteras, pistas de aeropuertos, aparcamientos, etc. Se precisa que las capas de material terminadas tengan ciertas propiedades (por ejemplo, densidad), que tengan un valor medido dentro de un rango especificado, con el fin de que cumplan las normativas de las autopistas estatales. Con frecuencia, es necesario para los operadores de los vehículos el tener que medir estas propiedades del material durante el proceso de la construcción, por ejemplo durante las operaciones de compactado, con el fin de medir su progreso para que cumplan estos requisitos de los materiales.
Con los sistemas conocidos actualmente para medir ciertas propiedades, es típicamente necesario mantener el dispositivo sensor en forma estacionaria o bien en forma próxima a una porción de la capa del material que se esté evaluando. En la mayoría de los casos, el sensor es una unidad independiente o bien está montado sobre su propio bastidor o soporte, pero ciertos sistemas sensores están montados sobre un vehículo de construcción. Al utilizar tales sistemas sensores montados en el vehículo, el vehículo típicamente tiene que detenerse en un lugar en particular sobre la capa de asfalto durante un periodo de tiempo necesario para realizar las medidas precisas de las propiedades del material. En consecuencia, el proceso de construcción que se está ejecutando por el vehículo, tal como una operación de compactado o apisonado tiene que interrumpirse durante este periodo de tiempo.
La patente de los EE.UU. número 5952561 expone un vehículo de compactado o apisonado que tiene unos sensores de microondas montado en forma fija por la parte frontal y posterior de una apisonadora. Un procesador genera los datos relativos a la densidad del material que se está compactando por la apisonadora, basándose en la información recibida desde dos sensores de microondas.
La patente de los EE.UU. numero 4149253 expone un vehículo de compactado del suelo que tiene una sonda de superficie montada sobre una rueda por medio de una configuración de una leva de disco. Conforme el vehículo se desplaza y gira la rueda, la sonda de superficie se eleva periódicamente, se transporta hacia delante, desciende y se deposita sobre la superficie del suelo durante un periodo de tiempo definido por la velocidad del vehículo. Al depositarse sobre la superficie del suelo, la sonda de superficie mide la densidad específica del suelo húmedo.
A la vista de las limitaciones de los conocidos y presentes sistemas sensores tal como se han expuesto anteriormente, es un objeto de la presente invención el proporcionar un vehículo de construcción que tenga un sensor que pueda elevarse y descender según lo deseado sin necesidad de interrumpir el proceso de construcción.
Este objeto se consigue mediante la invención de la reivindicación 1.
Los desarrollos adicionales de la invención se exponen en las reivindicaciones dependientes.
El sumario anterior, así como también la descripción de las realizaciones preferidas de la presente invención, se comprenderán mejor al ser leídas en conjunción con los dibujos adjuntos. Para el fin de la ilustración de la invención, se muestra la misma en los dibujos, los cuales son realizaciones esquemáticas que son las preferidas actualmente. Se comprenderá, no obstante, que la presente invención no está limitada a las configuraciones precisas y a las instrumentalizaciones mostradas. En los dibujos:
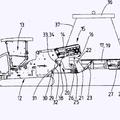
las figuras 1A-1D, que colectivamente están incluidas en la figura 1, son vistas en alzado lateral de un vehículo de construcción que tiene un sistema sensor de acuerdo con la presente invención, en donde cada vista esboza una posición diferente de una estructura preferida de un mecanismo de posicionamiento durante una operación de detección;
la figura 2 es una vista en alzado lateral despiezada y ampliada del sistema sensor mostrado en la figura 1, mostrando el sensor en una primera posición superior;
la figura 3 es otra vista del sistema esbozado en la figura 2, que muestra el sensor en una segunda posición inferior;
la figura 4 es una vista superior del sistema sensor descrito en la figura 2;
la figura 5 es una vista esquemática de un dispositivo sensor preferido;
las figuras 6A-6D, que colectivamente es la figura 6, son más vistas en alzado lateral esquemáticas de un vehículo de construcción que tiene un sistema sensor de acuerdo con la presente invención, en donde cada vista esboza una posición distinta de una estructura alternativa de un mecanismo de posicionamiento durante una operación de medida; y
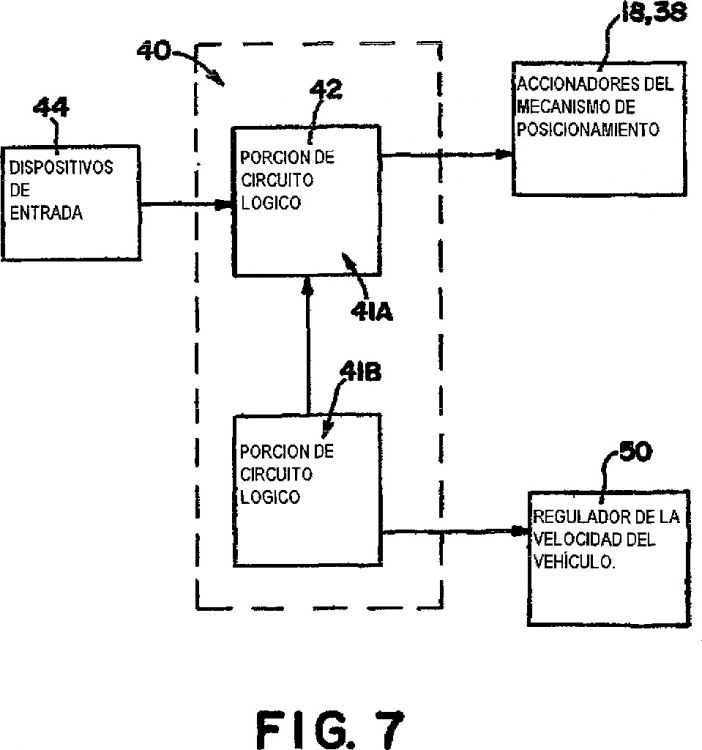
la figura 7 es un diagrama de bloques de un sistema de control utilizado con el sistema sensor.
Se utiliza una cierta terminología en la siguiente descripción solo por conveniencia no siendo limitante. Las palabras "derecha", "izquierda", "inferior", "superior", "hacia arriba", "abajo" y "hacia abajo", designan las direcciones en los dibujos a las cuales se hace referencia. Las palabras "frontal", "hacia el frente" y "posterior", "hacia atrás", se refieren a las direcciones hacia delante y alejándose desde, respectivamente, un extremo frontal designado de un vehículo de construcción. La terminología incluye las palabras específicamente mencionadas anteriormente, derivados de las mismas, y las palabras similares de importación.
Con referencia ahora a los dibujos con detalles, en donde los números iguales se utilizan para indicar elementos iguales en la totalidad de la exposición, se muestra en las figuras 1-7 una realización preferida actualmente de un sistema 10 para detectar una propiedad determinada de una capa de material M desde un vehículo 1 de construcción, teniendo la capa M una superficie superior S. El sistema sensor 10 incluye básicamente un sensor 12 configurado para medir una propiedad de la capa M de material y un dispositivo 11 de despliegue para desplegar el sensor 12 del vehículo 1. El dispositivo de despliegue 11 comprende un mecanismo de posicionamiento 14 conectado con el vehículo 1 y conectado (o conectable) con el sensor 12. El mecanismo 14 está configurado para desplazar el sensor 12 entre una primera y segunda posiciones verticales P1 y P2, con respecto a la capa M de material conforme el vehículo 1 se desplaza con respecto a la capa M. La primera posición P1 del sensor está separada en una distancia substancial ds por encima de la superficie S superior de la capa de material, en donde el sensor 12 está localizado preferiblemente en forma próxima al chasis 2 al estar dispuesto en la primera posición P1. La segunda posición P2 del sensor está separada del chasis 2 y está localizada en forma proximal a la superficie S de la capa de material o dispuesta sobre la superficie S de la capa de material, en donde el sensor 12 es capaz de detectar la propiedad del material al estar dispuesto en la segunda posición P2.
Preferiblemente, el dispositivo 11 de despliegue comprende además un circuito lógico 40, configurado para operar el mecanismo de posicionamiento 14, de forma tal que el mecanismo 14 desplace secuencialmente el sensor 12 desde la primera posición P1 a la segunda posición P2, que permite que el sensor 12 permanezca generalmente dispuesto en la segunda posición P2 durante un periodo de tiempo, y que desplace el sensor 12 desde la segunda posición P2 a la primera posición P1 después de un lapso del periodo de tiempo. Así pues, el dispositivo de despliegue 11 permite que el sistema sensor 10 pueda medir una o más propiedades de la capa de material M, preferiblemente al menos la densidad del material, conforme el vehículo 1 se desplace linealmente o "viaje" sobre o adyacentemente con respecto a la capa M de material. Cada uno de los elementos básicos expuestos anteriormente del sistema sensor 10 se describen con más detalles más adelante.
Con referencia en particular a la figura 1, el sistema sensor 10 se utiliza preferiblemente con una apisonadora 1 de doble tambor, que tiene un chasis 2 y los...
Reivindicaciones:
1. Un vehículo de construcción (1) con un sistema sensor para detectar una propiedad de la capa de material (M), en donde la capa (M) de material tiene una superficie superior (S) y un sistema sensor que comprende:
un sensor (12) configurado para detectar la propiedad del material; y
un mecanismo de posicionamiento (14) que tiene un accionador (18; 22; 26; 28) conectado con el vehículo y un miembro de conexión (16; 20; 32) que tiene un primer extremo (16a; 20a) conectado o conectable con el sensor (12) y un segundo extremo opuesto (16b; 20b) conectado con el vehículo (1) o el accionador, en donde el accionador (18; 22; 26, 28) está configurado para desplazar el primer extremo del miembro de conexión (16a; 20a) para mover el sensor (12) entre una primera posición (P1) espaciada en una substancial distancia por encima de la superficie (S) superior de la capa de material y una segunda posición (P2) situada en forma proximal hacia o sobre la superficie superior de la capa (S), siendo el sensor (12) capaz de detectar la propiedad del material al disponerlo en la segunda posición (P2);
el mecanismo de posicionamiento (14) se configura mientras que el vehículo (1) se desplaza con respecto a la capa de material (M) para desplazar secuencialmente el sensor (12) desde la primera posición (P1) a la segunda posición (P2), para permitir que el sensor (12) permanezca generalmente dispuesto en la segunda posición (P2) durante un periodo de tiempo, y desplazando el sensor (12) desde la segunda posición (P2) a la primera posición (P1) después de transcurrir el periodo de tiempo;
caracterizado porque:
tiene un circuito lógico eléctrico (40) conectado eléctricamente al accionador (18; 22; 26; 28), y configurado para generar y transmitir señales de control al accionador (18; 22; 26; 28) para operar el accionador (18; 22; 26; 28), con el fin de desplazar de forma controlable el sensor (12), entre las mencionadas primera y segunda posiciones (P1, P2), mientras que el vehículo se desplaza con respecto a la capa de material (M).
2. El vehículo de construcción (1) según lo expuesto en la reivindicación 1, que incluye además:
un regulador de velocidad (50) configurado para ajustar la velocidad de desplazamiento del vehículo,
el circuito lógico eléctrico (40) que está conectado operativamente con el regulador de velocidad (50), y que está configurado además para operar el regulador de velocidad (50), de forma tal que el regulador de velocidad (50) reduce la velocidad del vehículo generalmente con antelación al mecanismo de posicionamiento (14) para desplazar el sensor (12) desde la primera posición (P1) a la segunda posición (P2), e incrementando la velocidad del vehículo generalmente después de que el mecanismo de posicionamiento (14) desplace el sensor (12) desde la segunda posición (P2).
3. El vehículo de construcción (1) según lo expuesto en la reivindicación 1 ó 2, que comprende además un dispositivo de entrada (44) conectado operativamente al circuito lógico eléctrico (40) y configurado para iniciar el desplazamiento del sensor (12).
4. El vehículo de construcción (1) según lo expuesto en cualquier reivindicación anterior, en donde:
el sensor (12) está configurado para generar al menos una señal correspondiente a un valor de la propiedad del material detectado; y
en donde el vehículo comprende además un dispositivo de visualización (46) conectado con el sensor (12) y configurado para recibir la señal y para proporcionar una indicación visual correspondiente al valor de la propiedad del material.
5. El vehículo de construcción (1) tal como se ha expuesto en cualquier reivindicación anterior, en donde:
el sensor (12) está configurado para generar al menos una señal correspondiente a un valor de la propiedad del material detectado; y
el vehículo que comprende además un dispositivo de almacenamiento (48) conectado operativamente con el sensor (12), y configurado para recibir y almacenar la señal del sensor.
6. El vehículo de construcción (1) tal como se ha expuesto en cualquier reivindicación anterior, en donde el sensor (12) está configurado para detectar la densidad, la temperatura, la profundidad del material o el grosor del material de la capa (M) de material.
7. El vehículo de construcción (1) según lo expuesto en cualquier reivindicación anterior, en donde:
el accionador (18) es un accionador giratorio (22) que tiene un eje giratorio (23); y
el miembro de conexión (16) es un miembro (20) de conexión flexible, en donde el segundo extremo (20) del miembro de conexión está conectado con el eje accionador (23) de forma tal que la rotación del eje (23) en una primera dirección (D1) desplaza el sensor (12) desde la primera posición (P1) a la segunda posición (P2), y la rotación del eje (23) en una segunda dirección opuesta (D2) desplaza el sensor (12) desde la segunda posición (P2) a la primera posición (P1).
8. El vehículo de construcción (1) tal como se ha expuesto en la reivindicación 7, en donde el mecanismo de posicionamiento (14) incluye además un carrete (25) montado en el eje accionador (23); en donde el segundo extremo (20) del miembro de conexión flexible está fijado al carrete (25) de forma tal que el miembro de conexión flexible (20) está dispuesto parcialmente alrededor del carrete (25) y la rotación del eje accionador (23) en la primera dirección (D1) provoca que una porción (I1) del miembro (20) de conexión flexible pueda des-enrollarse del carrete (25), para desplazar el sensor (12) desde la primera posición (P1) a la segunda posición (P2), y la rotación del eje accionador (23) en la segunda dirección opuesta (D2) provoca que la porción del miembro de conexión flexible (20) se enrolle alrededor del carrete (25) de forma que el sensor (12) se desplace desde la segunda posición (P2).
9. El vehículo de construcción (1) según lo expuesto en la reivindicación 8, en donde el mecanismo de posicionamiento (14) está adaptado de forma tal que cuando el sensor (12) está dispuesto en la segunda posición (P2), la rotación adicional del eje accionador (23) en la primera dirección (D1) provoca que otra porción (I2) del miembro (20) de conexión flexible pueda des-enrollarse del carrete (25) de forma tal que el sensor (12) permanezca generalmente dispuesto en la segunda posición (P2) conforme el vehículo (1) se desplace con respecto a la capa (M) de material.
10. El vehículo de construcción (1) según lo expuesto en cualquiera de las reivindicaciones 1-6, en donde:
el accionador (18) incluye un accionador lineal (26) que tiene un primer extremo (26a) conectado con el miembro de conexión (16) y el segundo extremo (26b) conectado con el vehículo (1), en donde el primer extremo del accionador (26a) es desplazable con respecto al segundo extremo (26b) del accionador; y
en donde el miembro de conexión (16) incluye un enlace alargado (32) que tiene un primer extremo conectado con el sensor (12), y un segundo extremo conectado pivotalmente con el vehículo (1) tal que el desplazamiento del primer extremo del accionador (26a) pivota el enlace alargado (32) para poder desplazar el sensor (12) entre la primera y la segunda posiciones del sensor (P1, P2).
11. El vehículo de construcción (1) según lo expuesto en la reivindicación 10, en donde el accionador lineal (26) incluye un cilindro hidráulico (28) que tiene un primer extremo conectado con el enlace alargado (32) y un segundo extremo conectado con el vehículo (1), de forma tal que la extensión del cilindro (28) desplaza el sensor (12) desde la primera posición (P1) a la segunda posición (P2), y l retracción del cilindro (28) desplaza el sensor (12) desde la segunda posición (P2) a la primera posición (P1).
12. El vehículo de construcción (1) tal como se ha expuesto en cualquiera de las reivindicaciones 1-6, 10 u 11, en donde el mecanismo de posicionamiento (14) incluye además:
un raíl (34) fijado al vehículo (1);
un primer miembro de deslizamiento (36A) conectado en forma movible con el raíl (34), en donde el segundo miembro de conexión está fijado al primer miembro deslizante (36A);
un segundo miembro de deslizamiento (36B) conectado en forma movible con el raíl (34) y separado del primer miembro de deslizamiento (36A), en donde el segundo extremo del accionador (18, 26) está fijado al segundo miembro de deslizamiento (36B);
y
otro accionador (38) conectado al menos con uno de los dos miembros de deslizamiento (36A; 36B) y configurado para desplazar los miembros deslizantes (36A; 36B) a lo largo del raíl (34) de forma que se desplace el miembro de conexión (16) y el accionador (18, 26) con respecto al vehículo (1), de forma tal que el sensor (12) permanezca generalmente dispuesto en la segunda posición (P2) conforme el vehículo (1) se desplace con respecto a la capa (M) de material.
13. Un vehículo de construcción (1) según lo expuesto en cualquier reivindicación anterior, en donde el sensor (12) está conectado al mecanismo de posicionamiento (14) por medio de un dispositivo (15) de soporte del sensor.
14. Un vehículo de construcción (1) según lo expuesto en cualquier reivindicación anterior, en donde el vehículo es un vehículo de compactación o apisonado, una pavimentadora o un vehículo de transferencia de material.
Patentes similares o relacionadas:
Máquina con ruedas, en particular para el depósito de materiales sueltos en el suelo, del 29 de Abril de 2020, de RKM: Dispositivo con ruedas , en particular para depositar materiales sueltos en el suelo en forma de lecho, donde dicho dispositivo incluye un chasis con ruedas […]
Vehículo de transferencia de material que tiene una tolva de recepción de camión expansible, del 12 de Febrero de 2020, de ROADTEC, INC.: Vehículo de transferencia de material que comprende una tolva de recepción de camión que está adaptada para recibir material de asfalto desde de un camión , […]
EXTENDEDORA DE AGLOMERADO DE ASFALTO PARA ASFALTAR UNA SUPERFÍCIE QUE DEBE SER ASFALTADA, del 25 de Abril de 2019, de AGUSTÍ Y MASOLIVER, S.A: Extendedora de aglomerado de asfalto para asfaltar una superficie que debe ser asfaltada que comprende una tolva de recepción de aglomerado de […]
Procedimiento para determinar la calidad de un pavimento de asfalto de nueva producción, del 10 de Abril de 2019, de CA Konsult: Procedimiento para determinar la calidad de un pavimento asfáltico, comprendiendo el procedimiento las etapas de: a) proporcionar e inicializar al menos un sensor […]
Vehículo de transferencia de material con control de deflector automático para tolva de recepción de camión, del 24 de Octubre de 2018, de ROADTEC, INC.: Vehículo de transferencia de material para transferir material asfáltico desde un camión de suministro hasta una máquina de pavimentación asfáltica, […]
 Alimentador y procedimiento para el reequipamiento del mismo, del 2 de Marzo de 2016, de Dynapac GmbH: Procedimiento para el reequipamiento de un alimentador, en el que un transportador longitudinal se desmonta del mecanismo de traslación del alimentador y se vuelve […]
Alimentador y procedimiento para el reequipamiento del mismo, del 2 de Marzo de 2016, de Dynapac GmbH: Procedimiento para el reequipamiento de un alimentador, en el que un transportador longitudinal se desmonta del mecanismo de traslación del alimentador y se vuelve […]
 Adoquín permeable y método de fabricación del mismo, del 23 de Febrero de 2016, de Pacific Interlock Pavingstone, Inc: Un procedimiento para fabricar un adoquín permeable que tiene una permeabilidad mayor que 1 pulgada (25,4 mm) de agua por hora y que tiene una […]
Adoquín permeable y método de fabricación del mismo, del 23 de Febrero de 2016, de Pacific Interlock Pavingstone, Inc: Un procedimiento para fabricar un adoquín permeable que tiene una permeabilidad mayor que 1 pulgada (25,4 mm) de agua por hora y que tiene una […]
Dispositivo y procedimiento para la producción de elementos perfilados de hormigón, del 23 de Abril de 2014, de HOLZBERGER, MATTHIAS: Dispositivo de encofrado deslizante para la fabricación de elementos de hormigón perfilados con una pieza de moldeo móvil sobre una trayectoria de fabricación […]