SISTEMA DE LOCALIZACION CON BALIZA DIGITAL DE BARRIDO.
Un sistema de detección, que comprende:
un transmisor fijo para transmitir de forma digital un paquete de datos que incluye información angular asociada al ángulo de emisión de esta información desde el transmisor,
transmitiendo el transmisor el paquete de datos dentro de un ángulo de emisión, y
una unidad móvil que incluye un receptor para recibir el paquete de datos transmitido, en la cual
la unidad móvil está configurada para
detectar una pluralidad de paquetes de datos procedentes de un único transmisor, incluyendo dicha pluralidad de paquetes de datos información angular no idéntica,
determinar nueva información angular a partir de la información angular no idéntica de la citada pluralidad de paquetes de datos, y
determinar una posición de la unidad móvil con respecto al transmisor utilizando la nueva información angular;
caracterizado porque:
el transmisor incrementa de forma secuencial el ángulo de emisión en un ángulo de incremento, siendo el ángulo de incremento menor que el ángulo de emisión
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/064953.
Solicitante: INTERNATIONAL BUSINESS MACHINES CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: NEW ORCHARD ROAD,ARMONK, NY 10504.
Inventor/es: JOHNSON,MICHAEL,JOSEPH.
Fecha de Publicación: .
Fecha Concesión Europea: 24 de Marzo de 2010.
Clasificación Internacional de Patentes:
- G01S1/66 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 1/00 Balizas o sistemas de balizas que transmiten señales que tienen una o más características que pueden ser detectadas por receptores no direccionales y que definen direcciones, posiciones o líneas de posición fijas con relación a los transmisores de las balizas; Receptores asociados a ellas (fijación de la posición mediante la coordinación de una pluralidad de determinaciones de líneas de posición o direcciones G01S 5/00). › Superposición de señales de información indicadoras de dirección, p. ej. voz, Morse.
Clasificación PCT:
- G01S1/66 G01S 1/00 […] › Superposición de señales de información indicadoras de dirección, p. ej. voz, Morse.
Fragmento de la descripción:
Sistema de localización con baliza digital de barrido.
Campo del invento
La explicación se refiere de manera general a sistemas de localización y, más en concreto, a un sistema de localización que utiliza transmisores fijos y un receptor móvil.
Antecedentes del invento
Muchas aplicaciones software son de mayor valor para un usuario si se puede conocer con precisión la posición de dicho usuario. Por ejemplo, basándose en la posición de un carrito de la compra dentro de un supermercado, la aplicación software puede ayudar al usuario a encontrar artículos de una lista de la compra o puede avisar al usuario de descuentos disponibles en artículos cercanos. Sin embargo, equipar el carrito de la compra con un sistema de localización añade costes significativos a la infraestructura (por ejemplo, un almacén de venta al por menor asociado) a la que está asociado el citado carrito de la compra.
Cierta tecnología existente permite que se determine una posición mediante el uso de emisores-receptores inalámbricos en el carrito de la compra/unidad móvil acoplados con puntos de acceso inalámbricos de la infraestructura. La posición se determina basándose en fuerzas de una señal recibida por los emisores-receptores inalámbricos procedente de los puntos de acceso inalámbricos. Sin embargo, no se ha demostrado que esta tecnología sea precisa y repetible en ciertos entornos, tales como un almacén de venta al por menor. Existe, por lo tanto, una necesidad de un sistema de localización que se pueda utilizar para determinar una posición de una unidad móvil dentro de una zona definida, tal como un almacén de venta al por menor, que reduzca la necesidad de instalación de hardware adicional en el interior de la infraestructura y que proporcione al mismo tiempo mayor precisión en la determinación de la posición de la unidad móvil.
El documento WO99/34230 explica un sistema de señalización para seguir a los jugadores sobre un terreno deportivo. Haces buscadores que transmiten información relacionada con el barrido realizan barridos sobre una zona en la cual están activos los jugadores. Dispositivos portátiles que llevan los jugadores detectan cada pasada de los haces buscadores y almacenan partes relevantes de la información relacionada con el barrido para cada haz. La información es transmitida por los dispositivos a una base central en la que se realizan cálculos de posición.
Descripción del invento
Realizaciones del invento solucionan deficiencias de la técnica con respecto a sistemas de localización y proporcionan un sistema, método, programa y unidad móvil novedosos y no-obvios para determinar una posición de la unidad móvil. El sistema de detección incluye un transmisor fijo y una unidad móvil. El transmisor fijo transmite un paquete de datos que incluye información angular asociada al transmisor y la unidad móvil incluye un receptor para recibir el paquete de datos transmitido. La unidad móvil está configurada para detectar una pluralidad de paquetes de datos procedentes de un único transmisor, incluyendo dicha pluralidad de paquetes de datos información angular no idéntica. La unidad móvil también determina nueva información angular a partir de la información angular no idéntica contenida en la citada pluralidad de paquetes de datos. Asimismo, la unidad móvil determina una posición de la unidad móvil con respecto al transmisor utilizando la nueva información angular. El invento está caracterizado porque la información angular está asociada al ángulo de emisión de esta información desde el transmisor; el transmisor transmite el paquete de datos dentro del ángulo de emisión; el paquete de datos se transmite de forma digital; y el transmisor incrementa de forma secuencial el ángulo de emisión en un ángulo de incremento.
En ciertos aspectos, el sistema de detección incluye una pluralidad de transmisores fijos, transmitiendo de forma digital cada transmisor un respectivo paquete de datos que incluye información angular. La unidad móvil está configurada para que calcule una posición bidimensional o tridimensional de la unidad móvil con respecto a la pluralidad de transmisores basándose en la nueva información angular determinada a partir de la pluralidad de paquetes de datos respectivos.
En aspectos adicionales, el transmisor transmite el paquete de datos dentro de un ángulo de emisión. Además, el transmisor incrementa de forma secuencial el ángulo de emisión en un ángulo de incremento que es menor o igual que la mitad del ángulo de emisión.
Breve descripción de los dibujos
Se describirá ahora el invento, sólo a modo de ejemplo, haciendo referencia a los dibujos adjuntos, en los cuales:
La figura 1 es una ilustración esquemática de un sistema de localización de acuerdo con las disposiciones del invento;
La figura 2 es una vista en planta del sistema de localización con una unidad móvil y un único transmisor; y
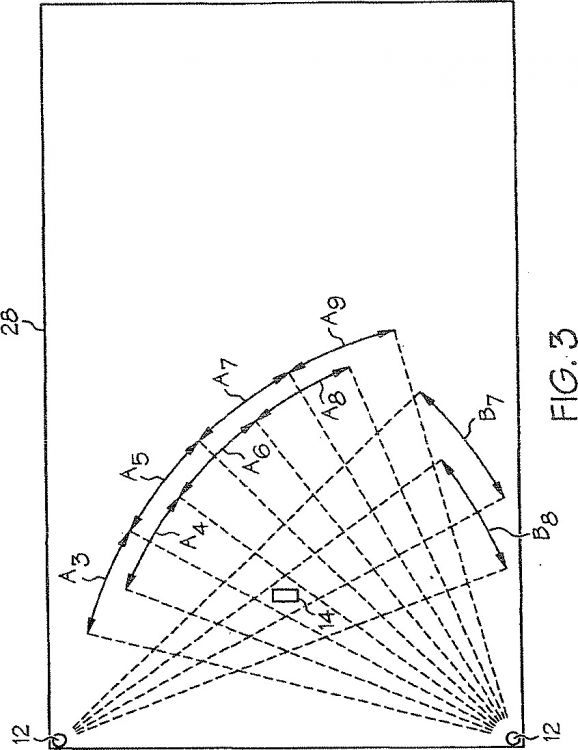
La figura 3 es una vista en planta del sistema de localización con una unidad móvil y múltiples transmisores.
Descripción detallada del invento
La figura 1 ilustra un sistema 10 de localización para determinar una posición de una unidad 14 móvil. El sistema 10 de localización incluye uno o más transmisores 12 que transmiten de forma digital un paquete de datos que incluye información angular asociada al respectivo transmisor 12. La unidad 14 móvil incluye un receptor para recibir el paquete de datos transmitido, y el receptor puede incluir una antena 22, un sistema 24 informático y un dispositivo 26 de entrada/salida.
La unidad 14 móvil puede estar unida a un carrito 16 movible. La unión de la unidad 14 móvil al carrito 16 puede ser permanente. De forma alternativa, la unidad 14 móvil puede ser desmontable del carrito 16 de tal manera que se pueda quitar la unidad 14 móvil de un carrito y se pueda unir a otro carrito. El sistema 10 de localización no está limitado a un tipo concreto de carrito 16 al cual está unida la unidad 14 móvil. En ciertos aspectos del sistema 10 de detección, el carrito 16 se puede utilizar para almacenar artículos. De esta manera, el carrito 16 puede incluir una cesta 20 para contener artículos. Asimismo, la forma en que se puede mover el carrito 16 no está limitada. Sin embargo, en ciertos aspectos del sistema 10 de detección, el carrito 16 incluye ruedas 18.
El sistema 24 informático controla el funcionamiento del sistema 26 de entrada/salida y recibe los paquetes de datos digitales procedentes del transmisor o transmisores 12 utilizando la antena 22. La unidad 14 móvil no está limitada a un tipo concreto de sistema 24 informático o al lugar en el que está situado el sistema 24 informático. Por ejemplo, el sistema 24 informático, o partes del mismo, puede estar situado lejos de la unidad 14 móvil y/o partes del sistema 24 informático pueden estar incluidas en el interior de la unidad 14 móvil.
Con la unidad 14 móvil se pueden utilizar muchos tipos de dispositivos 26 de entrada/salida, y la presente unidad 14 móvil no está limitada a un tipo particular de dispositivo 26 de entrada/salida. Por ejemplo, el dispositivo 26 de entrada/salida puede ser dispositivos independientes, tales como un teclado y una pantalla de vídeo, o el dispositivo 26 de entrada/salida puede estar combinado en una única unidad, tal como una pantalla de vídeo táctil.
Haciendo referencia a la figura 2, el transmisor 12 transmite de forma digital un paquete de datos sobre un ángulo A de transmisión o de emisión dado. Al estar la unidad 14 móvil en el interior de la zona abarcada por el ángulo A de emisión, la unidad 14 móvil puede recibir el paquete de datos transmitido por el transmisor 12. Si no, la unidad 12 móvil no recibe la transmisión.
El transmisor 12 está configurado para emitir el paquete de datos incrementando el ángulo de emisión utilizando un ángulo de incremento. Aunque el sistema 10 de localización no está limitado en la manera en que se incrementa progresivamente el ángulo A de emisión, el incremento se puede conseguir por medio de, por ejemplo, una antena de elementos múltiples en fase fabricada con IC, en la cual se puede seleccionar la dirección de la señal emitida aplicando un desfase de corriente continua. Esto permite que el área de cobertura, es decir, el área dentro de la zona A de emisión, se conforme/ajuste de forma dinámica y electrónica utilizando, por ejemplo, control por software de un puerto de salida digital y un convertidor digital a analógico.
A modo de ejemplo, el ángulo A de emisión ilustrado...
Reivindicaciones:
1. Un sistema de detección, que comprende:
caracterizado porque:
el transmisor incrementa de forma secuencial el ángulo de emisión en un ángulo de incremento, siendo el ángulo de incremento menor que el ángulo de emisión.
2. El sistema de detección de acuerdo con la reivindicación 1, en el cual dicho sistema de detección incluye una pluralidad de transmisores fijos, transmitiendo de forma digital cada transmisor de la pluralidad de ellos un paquete de datos respectivo que incluye información angular.
3. El sistema de detección de acuerdo con la reivindicación 1, en el cual la unidad móvil está configurada para calcular una posición tridimensional de la unidad móvil con respecto a la pluralidad de transmisores.
4. El sistema de detección de acuerdo con la reivindicación 1, en el cual la unidad móvil está configurada para indicar a un usuario información asociada a la posición determinada.
5. El sistema de detección de acuerdo con la reivindicación 1, en el cual el ángulo de incremento es menor o igual que la mitad del ángulo de emisión.
6. Una unidad móvil para recibir un paquete de datos transmitido que incluye información angular asociada al ángulo de emisión de esta información, transmitiendo el transmisor el paquete de datos dentro de un ángulo de emisión, desde un transmisor fijo, en la cual
la unidad móvil está configurada para
detectar una pluralidad de paquetes de datos procedentes de un único transmisor, incluyendo dicha pluralidad de paquetes de datos información angular no idéntica asociada al único transmisor,
determinar nueva información angular a partir de la información angular no idéntica de la citada pluralidad de paquetes de datos, y
determinar una posición de la unidad móvil con respecto al transmisor utilizando la nueva información angular;
caracterizado porque:
el transmisor incrementa de forma secuencial el ángulo de emisión en un ángulo de incremento, siendo el ángulo de incremento menor que el ángulo de emisión.
7. La unidad móvil de acuerdo con la reivindicación 6, en la cual dicha unidad móvil está configurada para calcular una posición tridimensional de la unidad móvil con respecto a una pluralidad de transmisores fijos.
8. La unidad móvil de acuerdo con la reivindicación 6, en la cual dicha unidad móvil está configurada para indicar a un usuario información asociada a la posición determinada.
9. La unidad móvil de acuerdo con la reivindicación 6, en la cual el transmisor transmite el paquete de datos dentro de un ángulo de emisión.
10. Un método para determinar una posición de una unidad móvil, que comprende los pasos de:
caracterizado porque:
el transmisor incrementa de forma secuencial el ángulo de emisión en un ángulo de incremento, siendo el ángulo de incremento menor que el ángulo de emisión.
11. El método de acuerdo con la reivindicación 10, en el cual la unidad móvil está configurada para calcular una posición tridimensional de la unidad móvil con respecto a una pluralidad de transmisores fijos.
12. La unidad móvil de acuerdo con la reivindicación 10, en la cual la unidad móvil está configurada para indicar a un usuario información asociada a la posición determinada.
13. La unidad móvil de acuerdo con la reivindicación 10, en la cual el transmisor transmite el paquete de datos dentro de un ángulo de emisión.
14. Un programa informático que comprende medios de código de programa adaptados para realizar todos los pasos de cualquiera de las reivindicaciones 10 a 13 cuando se ejecuta dicho programa en un ordenador.
Patentes similares o relacionadas:
Método y aparato para conformar un haz remoto, del 4 de Octubre de 2017, de LOCATA CORPORATION PTY LTD: Un dispositivo para conformar un haz desde un sistema de antenas, en un receptor físicamente separado, incluyendo el dispositivo: un sistema […]