PROCEDIMIENTO Y SISTEMA DE VIGILANCIA DE BUCLES DE SEGUIMIENTO DE CODIGO EN UN RECEPTOR DE POSICIONADO POR SATELITES.
Procedimiento de vigilancia continua de un bucle de seguimiento (10) de una señal recibida (S) de un satélite,
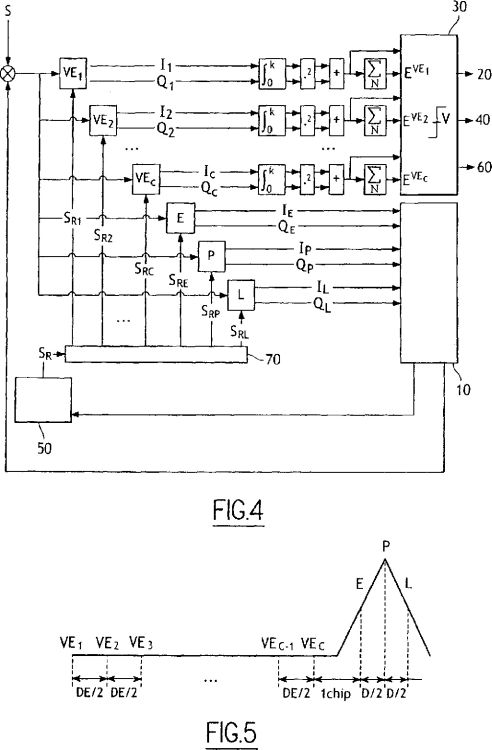
siendo dicha señal adquirida por un receptor de posicionado por satélite a través de un canal asociado a dicho satélite, siendo dicho bucle (10) pilotado por unos resultados de correlación (I E , Q E , I M , Q P , I L , Q L ), determinados por medio de correlacionadores de pilotaje (E, P, L) centrados sobre un pico de correlación de la señal recibida (S) y tomando en consideración la señal recibida (S) y unas señales de réplica (S ER, S RP, S RL) desplazadas temporalmente unas con respecto a las otras, caracterizado porque se determina una pluralidad de energías (E VE1 , E VE2 ,..., E VEC ) por medio de una pluralidad de correlacionadores avanzados de vigilancia (VE 1, VE 2,..., VE C) que toman en consideración la señal recibida (S) y unas señales de réplica temporalmente avanzadas (S R1,...S RC) con respecto a las señales de réplica (S RE, S RP, S RL) utilizadas por los correlacionadores de pilotaje (E, P, L), y porque se compara por medio de un detector (30) cada una de las energías (E VE1 , E VE2 ,... E VEC ) procedentes de los resultados de correlación obtenidos por medio de los correlacionadores avanzados de vigilancia (VE1, VE2,..., VEC) con un umbral (V) de manera que vigilen que el pico de correlación sobre el cual están centrados los correlacionadores de pilotaje es relativo al trayecto directo de la señal recibida (S), siendo dicho umbral (V) función de la estimación de la energía del ruido a la salida de los correlacionadores y de una probabilidad de falsa alarma asignada al detector (30)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08101907.
Solicitante: SAGEM DEFENSE SECURITE.
Nacionalidad solicitante: Francia.
Dirección: LE PONANT DE PARIS 27, RUE LEBLANC,75015 PARIS.
Inventor/es: BOUVET,DENIS, ARTAULT,ALEXANDRE.
Fecha de Publicación: .
Fecha Solicitud PCT: 22 de Febrero de 2008.
Fecha Concesión Europea: 7 de Octubre de 2009.
Clasificación Internacional de Patentes:
- G01S1/00S2C4
- H04B1/707B
Clasificación PCT:
- G01S1/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › Balizas o sistemas de balizas que transmiten señales que tienen una o más características que pueden ser detectadas por receptores no direccionales y que definen direcciones, posiciones o líneas de posición fijas con relación a los transmisores de las balizas; Receptores asociados a ellas (fijación de la posición mediante la coordinación de una pluralidad de determinaciones de líneas de posición o direcciones G01S 5/00).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Procedimiento y sistema de vigilancia de bucles de seguimiento de código en un receptor de posicionado por satélites.
Campo técnico general
La presente invención se refiere a los receptores de posicionado por satélites y se refiere más precisamente a la mejora de las características de los bucles de seguimiento utilizados en dichos receptores.
La invención es en particular aplicable a los receptores de las señales transmitidas por los sistemas GPS, Glonass, Galileo y otros sistemas análogos de posicionado por satélites.
Estado de la técnica
Un receptor de posicionado por satélite utiliza las señales emitidas por una pluralidad de satélites en órbita alrededor de la tierra.
En particular es a través de una pluralidad de canales, cada uno asociado a un satélite, que se ha realizado el seguimiento de un satélite (seguimiento de una señal de un satélite).
Cada uno de los satélites emite sobre una o varias frecuencias dadas una señal modulada en fase por la combinación de un código de ensanchamiento de banda pseudoaleatorio y de un mensaje de navegación que contiene entre otros las efemérides de los satélites (es decir los elementos que definen su órbita y sus variaciones en función del tiempo). La señal puede también ser modulada por una subportadora, según las técnicas BOC (en inglés "Binary Offset Carrier") y derivadas.
El posicionado por satélites consiste en medir el tiempo de propagación de la señal emitida por los satélites hasta su llegada a la antena del receptor.
Estos tiempos de propagación multiplicados por la velocidad de transmisión de la señal dan las distancias satélite-receptor (más conocidas por el experto en la materia con el nombre de "pseudodistancias").
Estas, asociadas a la posición de los satélites calculada gracias a las efemérides, permiten calcular la posición del receptor y el desfasado de su reloj con respecto a las de los satélites.
Debe observarse que cuanto mayor es el número de satélites seguidos simultáneamente, mejor será la precisión del cálculo de posición. Este número está directamente relacionado con el número de canales de seguimiento de la señal del cual disponen los receptores de posicionado por satélites.
Debe observarse que para un sistema de posicionado dado, las señales transmitidas por un satélite dado se distinguen, o bien por la frecuencia de la portadora, o bien por el código pseudoaleatorio que modula esta portadora. Pueden también distinguirse por las características de su subportadora eventual.
En la continuación de la descripción, se coloca en el contexto de la recepción de las señales que utilizan una modulación de fase en dos estados (en inglés, "Binary Phase Shift Keying", (BPSK)), tal como la utilizada por el sistema GPS para la transmisión de las señales civiles que utilizan el código C/A, y de las señales militares que utilizan el código P(Y).
El principio de la medición consiste en generar para cada satélite visible por el receptor una réplica local del código pseudoaleatorio emitido por el satélite sobre una frecuencia próxima, o mejor igual, a la frecuencia de la señal recibida (transpuesta a baja frecuencia por un módulo de "Tratamiento Radio Frecuencia" no descrito) y en retardar este código local hasta que esté alineado sobre el código de la señal del satélite. El valor de este retardo medido gracias al reloj del receptor corresponde al tiempo de propagación de la señal.
La alineación de los dos códigos se observa por la correlación de los códigos recibida y generada y es mantenido de forma permanente gracias a un bucle de condicionado denominado bucle de seguimiento de código. Tal como es conocido, cada canal de seguimiento del receptor comprende tres correlacionadores, alimentados por una réplica puntual del código (correlacionador denominado "Prompt"), desplazado en avance en D/2 chip del código de ensanchado de banda (correlacionador denominado "Early") y desplazado en D/2 chip en retardo (correlacionador denominado "Late").
Se llamará a estos tres correlacionadores "correlacionadores de pilotaje".
Las figuras 1a, 1b y 1c ilustran respectivamente los resultados procedentes del correlacionador "Prompt", del correlacionador "Early" y del correlacionador "Late".
La figura 1d es la función característica "Early" menos "Late" (diferencia entre los resultados procedentes de los correlacionadores "Early" y "Late").
El bucle de seguimiento del código mantiene de forma permanente el correlacionador "Prompt" sobre el pico de correlación (véase la figura 1a) condicionando la generación de la réplica del código sobre el "cero", anotado 0 en en la figura 1d, de la función característica "Early" menos "Late". Este "cero" corresponde al vértice de la correlación "Prompt" (véase la figura 1a).
Se trata ahora del caso en que la señal satélite sólo presenta un trayecto.
Diferentes fuentes de error pueden afectar a la medición de las pseudodistancias y degradar la precisión del cálculo de posición del receptor.
Uno de los errores principales proviene de los trayectos múltiples o multitrayectos.
En efecto, cuando la señal emitida por el satélite es reflejada antes de alcanzar el receptor, el resultado de correlación de las señales indirectas pasa a añadirse al de la señal del trayecto directo. Son posibles entonces dos casos.
El primer caso de multitrayecto denominado "in-the-chip" está ilustrado por las figuras 2a, 2b y 2c.
La figura 2a representa las funciones de correlación 12 y 13 respectivamente procedentes de un trayecto directo y de un trayecto reflejado (trayecto indirecto).
En el ejemplo ilustrado por las figuras 2a, 2b y 2c, el trayecto suplementario recorrido por las ondas reflejadas es suficientemente corto para que la función de correlación 12 de la señal reflejada interfiera con la función de correlación 13 del trayecto directo. La forma de la función de correlación 11 procedente del correlacionador "Prompt", tal como se ha ilustrado en la figura 2b es entonces deformada así como la curva característica "Early" menos "Late" tal como se ha ilustrado en la figura 2c.
El error de seguimiento del código e está típicamente comprendido entre más o menos un semichip. Este primer caso constituye el objeto de numerosas investigaciones y diferentes soluciones fundadas sobre la correlación estrecha o la deformación del pico de correlación han visto la luz.
El segundo caso de multitrayecto denominado "out-of-the-chip" está ilustrado en las figuras 3a, 3b y 3c.
La figura 3a, representa las funciones de correlación 12 y 13 respectivamente procedentes de un trayecto directo y de un trayecto indirecto.
La desviación entre el trayecto indirecto y el trayecto directo es en este ejemplo superior a (1+D/2) chip (tal como es conocido se tiene D=1, la desviación es entonces igual a un chip y medio).
En el ejemplo ilustrado en las figuras 3a, 3b y 3c, las funciones de correlación 12 y 13 son suficientemente distintas de manera que el cero de la función característica "Early" menos "Late" no sea desplazado.
Por poco que el seguimiento de la señal esté condicionado sobre el pico de correlación 13 del trayecto directo, los trayectos indirectos no provocan error sobre la medición de la pseudodistancia. Se trata por tanto, en la adquisición, de buscar las señales satélites barriendo por lo menos con el correlacionador "Prompt" y de manera óptima con todos los correlacionadores disponibles en el receptor, el campo de búsqueda en código del más temprano (o más próximo) hacia el más retrasado (o más alejado) para garantizar detectar en primer lugar la energía del trayecto directo. El seguimiento de la señal se condicionará a continuación sobre el primer pico de correlación detectado.
Sin embargo, en cuanto el trayecto directo está enmascarado y solamente una señal reflejada llega al receptor, la adquisición y el seguimiento de la señal corren el riesgo de enclavarse sobre el pico de correlación del trayecto indirecto.
Esto introduce un error en la pseudodistancia, y por ello un error de cálculo de posición.
Para el segundo caso, una solución conocida consiste en dedicar un canal,...
Reivindicaciones:
1. Procedimiento de vigilancia continua de un bucle de seguimiento (10) de una señal recibida (S) de un satélite, siendo dicha señal adquirida por un receptor de posicionado por satélite a través de un canal asociado a dicho satélite, siendo dicho bucle (10) pilotado por unos resultados de correlación (IE, QE, IM, QP, IL, QL), determinados por medio de correlacionadores de pilotaje (E, P, L) centrados sobre un pico de correlación de la señal recibida (S) y tomando en consideración la señal recibida (S) y unas señales de réplica (SER, SRP, SRL) desplazadas temporalmente unas con respecto a las otras,
caracterizado porque se determina una pluralidad de energías (EVE1, EVE2,..., EVEC) por medio de una pluralidad de correlacionadores avanzados de vigilancia (VE1, VE2,..., VEC) que toman en consideración la señal recibida (S) y unas señales de réplica temporalmente avanzadas (SR1,...SRC) con respecto a las señales de réplica (SRE, SRP, SRL) utilizadas por los correlacionadores de pilotaje (E, P, L), y porque se compara por medio de un detector (30) cada una de las energías (EVE1, EVE2,... EVEC) procedentes de los resultados de correlación obtenidos por medio de los correlacionadores avanzados de vigilancia (VE1, VE2,..., VEC) con un umbral (V) de manera que vigilen que el pico de correlación sobre el cual están centrados los correlacionadores de pilotaje es relativo al trayecto directo de la señal recibida (S), siendo dicho umbral (V) función de la estimación de la energía del ruido a la salida de los correlacionadores y de una probabilidad de falsa alarma asignada al detector (30).
2. Procedimiento según la reivindicación anterior, caracterizado porque las señales de réplica (SR1,..., SRC) están desplazadas unas con respecto a las otras en DE/2 chip, siendo (DE) típicamente igual a uno, porque las señales de réplica SRC y SRE están desplazadas una con respecto a la otra en un chip, y porque las señales (SRE, SRP, SRL) están desplazadas unas con respecto a las otras en D/2 chip, siendo D típicamente igual a 1.
3. Procedimiento según una de las reivindicaciones 1 a 2, caracterizado porque en el caso en que una energía entre las energías (EVE1, EVE2,....., EVEC) procedentes de los resultados de correlación obtenidos por los correlacionadores de vigilancia de un canal es superior o igual al umbral (V), se invalidan las mediciones asociadas al satélite seguido para no utilizarlas en particular en el cálculo de la posición del receptor.
4. Procedimiento según una de las reivindicaciones 1 a 2, caracterizado porque en el caso en que una energía entre las energías (EVE1, EVE2....., EVEC) determinadas por los correlacionadores de vigilancia es superior o igual al umbral (V), se relanza la adquisición de la señal (S) inicializando dicha adquisición en avance del correlacionador que ha detectado la energía superior a dicho umbral (V).
5. Procedimiento según una de las reivindicaciones 1 a 2, caracterizado porque en el caso en que una energía de correlación entre las energías (EVE1, EVE2,..., EVEC) determinadas en los correlacionadores de vigilancia de un canal es superior o igual al umbral (V), se desplaza el seguimiento de la señal centrando los correlacionadores de pilotaje sobre el emplazamiento del correlacionador de vigilancia para el cual se ha detectado el pico de energía de co- rrelación.
6. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque las señales de réplicas que alimentan los correlacionadores de vigilancia (VE1, VE2,..., VEC) y de seguimiento (E, P, L) se obtienen por desplazamiento temporal por medio de un registro de desplazamiento (70) de la señal de réplica (SR).
7. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque las energías (EVE1, EVE2,..., EVEC) procedentes de los resultados de correlación obtenidos por medio de los correlacionadores de vigilancia son calculadas acumulando N veces, de forma no coherente, la energía de correlación calculada de forma coherente sobre k milisegundos, siendo dicha energía de correlación coherente la suma del resultado de correlación en fase (Ii), elevada al cuadrado con el resultado de correlación en cuadratura (Qi) elevado al cuadrado.
8. Procedimiento según la reivindicación 7, caracterizado porque k y N son por lo menos función de la probabilidad de falsa alarma asignada al detector (30).
9. Procedimiento según la reivindicación anterior, caracterizado porque k es por ejemplo igual a 5 ms y N es igual a 20.
10. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque las señales de réplica que alimentan los correlacionadores de seguimiento y de vigilancia son adyacentes.
11. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque se utiliza en cada canal para el seguimiento de una señal recibida (S) de un satélite.
12. Receptor de posicionado por satélite que comprende sobre un canal asociado a un satélite, que comprende:
- unos bucles de seguimiento (10) de una señal recibida (S) de un satélite,
- unos correlacionadores de pilotaje (E, P, L) centrados sobre un pico de correlación de la señal recibida (S) y que toman en consideración la señal recibida (S) y unas señales de réplica (SRE, SRP, SRL) desplazadas temporalmente unas con respecto a las otras,
caracterizado porque comprende además una pluralidad de correlacionadores avanzados de vigilancia (VE1, VE2,..., VEC) que toman en consideración la señal recibida (S) y unas señales de réplica temporalmente avanzadas (SR1,..., SRC) con respecto a la señales de réplica (SRE, SRP, SRL), utilizadas por los correlacionadores de pilotaje (E, P, L),
- un detector (30) para comparar cada una de las energías (EVE1, EVE2,..., EVEC) procedentes de los resultados de correlación obtenidos por medio de los correlacionadores avanzados de vigilancia (VE1, VE2..., VEC) con un umbral (V) de manera que vigilen que el pico de correlación sobre el cual están centrados los correlacionadores de pilotaje es relativo al trayecto directo de la señal recibida (S), siendo dicho umbral (V) función de la estimación de la energía del ruido a la salida de los correlacionadores y de una probabilidad de falsa alarma asignada al detector.
Patentes similares o relacionadas:
 METODO Y APARATO PARA PROCESAR SEÑALES PARA APLICACIONES DE DETERMINACION DE LA SEPARACION, del 23 de Marzo de 2010, de SEPTENTRIO N.V: Método para procesar por lo menos una señal enviada por un transmisor, usándose dicha señal para medir la separación, es decir, la distancia entre […]
METODO Y APARATO PARA PROCESAR SEÑALES PARA APLICACIONES DE DETERMINACION DE LA SEPARACION, del 23 de Marzo de 2010, de SEPTENTRIO N.V: Método para procesar por lo menos una señal enviada por un transmisor, usándose dicha señal para medir la separación, es decir, la distancia entre […]
Dispositivo de control de aparcamiento, del 29 de Mayo de 2020, de IGLESIAS CANEDA, Ramón: 1. Dispositivo de control de aparcamiento en plazas de aparcamiento con una dirección de entrada de un vehículo a la misma, caracterizado porque […]
Corrección DGNSS para posicionamiento, del 15 de Enero de 2020, de QUALCOMM INCORPORATED: Un procedimiento para realizar posicionamiento, que comprende: obtener un error de rango diferencial de usuario, UDRE y una tasa de crecimiento de […]
DUCHA SOLAR INTELIGENTE Y POLIVALENTE, del 4 de Julio de 2019, de LOPEZ GARCIA, Julio César: 1. Ducha solar inteligente y polivalente, basada en una instalación de ducha convencional provista o no de lava pies, caracterizada por incorporar electrónica programable […]
SISTEMA DE LOCALIZACIÓN PARA KITESURF, del 26 de Julio de 2018, de LATORRE OTERO, Alejandro: Sistema de localización para kitesurf, que comprende: un equipo de tabla (ET) para su fijación a una tabla de kitesurf, que comprende un emisor que emite una señal de […]
Uso de estaciones móviles para la determinación de parámetros de localización de estaciones base en un sistema de comunicación móvil inalámbrico, del 20 de Septiembre de 2017, de QUALCOMM INCORPORATED: Un procedimiento para determinar la posición de una estación base en una red de comunicación inalámbrica, comprendiendo el procedimiento: […]
Procedimiento que proporciona los medios para reconocer el origen y/o el contenido de una señal de RF, del 23 de Agosto de 2017, de THALES: Procedimiento que permite reconocer el origen y/o el contenido de una señal de RF, que comprende las siguientes etapas: - ensanchar una […]
Asistente para la práctica de golf personal y método y sistema para mostrar gráficamente información relacionada con golf y para recoger, procesar y distribuir datos relacionados con golf, del 21 de Junio de 2017, de Skyhawke Technologies, LLC: Un aparato portátil para mostrar distancias entre un golfista y un objeto en un campo de golf, que comprende: un dispositivo informático; un dispositivo de medición […]