MEJORAS EN O EN RELACION AL EQUIPO DE VISION MECANICO.
Equipo de visión mecánico para determinar una o más propiedades físicas de un artículo de fumar enrollado o de un filtro,
incorporando el equipo medios de establecimiento automático, y comprendiendo:
medios de toma de imágenes que comprenden una cámara (222) que definen un campo de vista y que se adaptan para formar una imagen de dicho artículo o de dicha varilla (10) dentro de cuyo campo de vista, y medios de procesamiento dispuestos a procesar dicha imagen para determinar una o más propiedades físicas de dicho artículo o varilla (10);
primeros medios de soporte (310, 311) para sostener dicho artículo o varilla dentro de dicho campo de vista a una distancia predeterminada desde dicha cámara;
segundos medios de soporte (312) para sostener un objeto de referencia (430) que tiene al menos una dimensión conocida con precisión;
medios de movimiento para mover selectivamente uno o más de la cámara (222), los primeros medios de soporte (310, 311), y los segundos medios de soporte (312) de forma que un objeto de referencia (430) colocado sobre los segundos medios de soporte (312) están dispuestos dentro del campo de vista de la cámara a dicha distancia predeterminada desde dicha cámara; medios de ajuste para ajustar automáticamente la configuración de los medios de imágenes; medios de determinación de la configuración óptima para determinar la configuración óptima de dichos medios de toma de imágenes por procesamiento de una o más imágenes de un objeto de referencia (430) colocado sobre los segundos medios de soporte (312); y medios de control para controlar la operación de dichos medios de movimiento, medios de toma de imágenes, medios de ajuste, y medios de determinación de la configuración óptima para llevar un objeto de referencia (430) soportado por dichos segundos medios de soporte (312) al campo de vista de la cámara, tomando la imagen de dicho objeto de referencia (430), determinando la configuración óptima de los medios de toma de imágenes, y ajusfando los medios de toma de imágenes a dicha configuración óptima
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2004/001177.
Solicitante: MOLINS PLC.
Nacionalidad solicitante: Reino Unido.
Dirección: ROCKINGHAM DRIVE, LINFORD WOOD EAST, MILTON KEYN.
Inventor/es: WILSON,RONALD FREDERICK, PITT,GARRY JOHN, IRONS,TIMOTHY G, EVERITT,WILLIAM A.H.
Fecha de Publicación: .
Fecha Concesión Europea: 16 de Diciembre de 2009.
Clasificación Internacional de Patentes:
- A24C5/34B
- G01B11/10 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › de objetos en movimiento.
- G01N21/88P
- G01N21/93 G01 […] › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 21/00 Investigación o análisis de los materiales por la utilización de medios ópticos, es decir, utilizando rayos infrarrojos, visibles o ultravioletas (G01N 3/00 - G01N 19/00 tienen prioridad). › Patrones de detección; Calibración.
- G01N21/952 G01N 21/00 […] › Inspección de la superficie exterior de cuerpos cilíndricos o de hilos (G01N 21/956 tiene prioridad).
Clasificación PCT:
- A24C5/34 NECESIDADES CORRIENTES DE LA VIDA. › A24 TABACO; PUROS; CIGARRILLOS; DISPOSITIVOS PARA SIMULAR LA ACCIÓN DE FUMAR; ARTICULOS PARA FUMADORES. › A24C MAQUINAS PARA LA FABRICACION DE PUROS O CIGARRILLOS. › A24C 5/00 Fabricación de cigarrillos; Fabricación de elementos terminales para puros o cigarrillos o fijación de filtros o boquillas a puros o cigarrillos. › Control de los cigarrillos o de tirulo, p. ej. para regular la alimentación de tabaco; Eliminación de cigarrillos defectuosos.
- G01B11/10 G01B 11/00 […] › de objetos en movimiento.
- G01N21/88 G01N 21/00 […] › Investigación de la presencia de grietas, de defectos o de manchas.
- G01N21/93 G01N 21/00 […] › Patrones de detección; Calibración.
- G01N21/952 G01N 21/00 […] › Inspección de la superficie exterior de cuerpos cilíndricos o de hilos (G01N 21/956 tiene prioridad).
Clasificación antigua:
- A24C5/34 A24C 5/00 […] › Control de los cigarrillos o de tirulo, p. ej. para regular la alimentación de tabaco; Eliminación de cigarrillos defectuosos.
- G01B11/10 G01B 11/00 […] › de objetos en movimiento.
- G01N21/93 G01N 21/00 […] › Patrones de detección; Calibración.
- G01N21/952 G01N 21/00 […] › Inspección de la superficie exterior de cuerpos cilíndricos o de hilos (G01N 21/956 tiene prioridad).
Fragmento de la descripción:
Mejoras en o en relación al equipo de visión mecánico.
La presente invención proporciona mejoras en o relativas al equipo de visión mecánico, y tiene referencia particular a un método y aparato para crear automáticamente tal equipo de visión mecánico.
La solicitud de patente internacional co-pediente n.º WO 2004/083 834 A, correspondiente a la solicitud anterior n.º 0306468.0. del Reino Unido describe un método y aparato para determinar una o más propiedades físicas de un artículo de fumar enrollado o de un filtro, que forma el posicionamiento de un artículo de fumar enrollado o de un filtro dentro de un campo de vista, la iluminación del campo de vista, la toma de imagen del artículo de fumar enrollado o filtro dentro del campo de vista para formar una imagen, y analizar la imagen para determinar una o más propiedades físicas del artículo de fumar enrollado o el filtro. Normalmente, la imagen es una imagen digital que es adquirida usando una cámara digital, preferiblemente una cámara digital de video. La imagen puede ser adquirida usando cualquier longitud de onda o gama de longitudes de onda, por ejemplo la luz infrarroja. Así, la imagen comprende una matriz digital de píxeles que puede ser analizada usando medios de procesamiento adecuados para determinar una o más propiedades físicas del artículo de fumar enrollado o del filtro tal como su longitud, diámetro, ovalidad, y similares.
Como se describe en WO 2004/083834 A, el análisis de la imagen digital puede ser realizado usando los algoritmos bien conocidos para detectar bordes dentro de la imagen.
Los algoritmos de este tipo pueden emplear niveles de contraste para definir un punto en el que un borde es definido como que está presente, la longitud (en píxeles) a lo largo de un borde detectado usado para determinar un borde contiguo y real, y algoritmos para llevar a cabo cálculos de probabilidad estadística para confirmar que un borde detectado es un borde real. Una técnica preferida para detectar un borde dentro de una imagen comprende generar proyecciones de la región horizontales y verticales dentro de una región de interés de la imagen, y después el análisis de las proyecciones para detectar cualesquiera bordes significantes. Las técnicas de procesamiento de imágenes de este tipo no son descritas con mayor detalle aquí, pero son descritas en una serie de obras de referencia estándares incluyendo Sonka, et al., 1999, Image Processing. Analysis and Machine Vision, segunda edición, página 356 (6.35), Pacific Grove: PWS Publishing, ISBN 0-534-95393-X.
La detección precisa de bordes dentro de una imagen digital por las técnicas de procesamiento de imágenes descritas anteriormente se basa en que tales bordes están nítidamente en el enfoque dentro de la imagen, para permitir que los bordes sean detectados sin exposición excesiva de la imagen que pudiera llevar a afectas indeseables tal como "el empañamiento", que se asocia con muchos dispositivos de toma de imágenes digitales, particularmente aquellos que comprenden sensores de tipo CCD.
A modo de antecedentes generales, el documento EP 0 758 742 A describe un sistema de enfoque equilibrado para lograr un enfoque óptimo de diferentes áreas de un objeto cuyas imágenes no son tomadas al mismo tiempo, pero se combinan en una imagen combinada. El sistema descrito es particularmente adecuado para inspeccionar la cara final de una fibra óptica y determinar la impresión por transferencia del núcleo de la fibra del centro teórico ideal. El documento EP 1 028 305 A divulga un aparato para determinar el diámetro de una rosca usando un sensor óptico, y FR 2 256 394 A también divulga un aparato para determinar el diámetro de una fibra con un sensor óptico.
El equipo de visión mecánico también es requerido para ser calibrado para proporcionar una conversión precisa de distancias medidas en píxeles en la imagen a distancias reales medidas, por ejemplo, en milímetros o pulgadas.
La calibración del equipo de visión mecánico es normalmente realizada usando objetos de referencia de dimensiones conocidas con precisión. Un objeto de referencia conocido comprende un cilindro maquinado de acero sólido que tiene un diámetro conocido con precisión. Los objetos de referencia de acero se usan en vista de su buena estabilidad dimensional. No obstante, los objetos de referencia de metal no son adecuados para calibrar el equipo de visión mecánico descrito por WO 2004/083834 A en vista de la alta reflectancia del metal.
Además, es generalmente inconveniente poner manualmente un objeto de referencia en el campo de vista del equipamiento de visión de la máquina para recalibración y calibración intermitente.
Por consiguiente, un objeto de referencia dimensionalmente estable es necesario que sea adecuado para el uso para calibrar el equipo de visión mecánico del tipo descrito por WO 2004/083834 A.
Hay también un requisito para un método de crear automáticamente tal equipo de visión mecánico.
Según la presente invención se proporciona un equipamiento de visión de la máquina para determinar una o más propiedades físicas de un artículo de fumar enrollado o de un filtro, incorporando el equipo unos medios de configuración automática, y comprendiendo:
En otro aspecto de la presente invención se proporciona un método de crear el equipo de visión mecánico mencionado anteriormente, comprendiendo dicho método la colocación de un objeto de referencia que tiene al menos una dimensión conocida con precisión en dicho segundo medio de soporte; mover selectivamente uno o más de dicha cámara, dicho primer medio de soporte y dicho segundo medio de soporte, de tal manera que dicho objeto de referencia se ponga en el campo de vista de la cámara a dicha distancia predeterminada de dicha cámara;
la toma de imagen de dicho objeto de referencia para obtener al menos una imagen, y el procesamiento de dicha al menos una imagen para determinar la configuración óptima del medio de toma de imágenes; y después de eso ajustar la configuración de dicho medio de toma de imágenes a dicha configuración óptima.
El objeto de referencia que tiene al menos una dimensión conocida con precisión puede colocarse en el segundo medio de soporte, y cuando el equipo de visión mecánico es requerido para ser creado, o se necesita que la creación del equipo de visión mecánico sea comprobado, el medio de control causa que el objeto de referencia en el segundo medio de soporte sea llevado al campo de vista de la cámara a la misma distancia predeterminada de la cámara como un objeto de prueba en el primer medio de soporte durante el manejo normal del equipo de visión mecánico. Se puede entonces tomar la imagen del objeto de referencia, y la imagen puede ser procesada para determinar la creación óptima...
Reivindicaciones:
1. Equipo de visión mecánico para determinar una o más propiedades físicas de un artículo de fumar enrollado o de un filtro, incorporando el equipo medios de establecimiento automático, y comprendiendo:
2. Equipo de visión mecánico según la reivindicación 1, caracterizado por el hecho de que dichos medios de determinación de la configuración óptima son adaptados para determinar la configuración óptima de los medios de toma de imágenes por procesamiento de una pluralidad de imágenes de dicho objeto de referencia obtenido con dichos medios de toma de imágenes en diferentes configuraciones respectivas, y dichos medios de control son adaptados para controlar dichos medios de toma de imágenes, medios de ajuste, y medios de determinación de la configuración óptima para obtener y procesar imágenes en serie de dichos medios del objeto de referencia mientras se ajusta progresivamente la configuración de los medios de toma de imágenes, y para determinar la configuración óptima basándose en dichas imágenes en serie.
3. Equipo de visión mecánico según la reivindicación 2, caracterizado por el hecho de que dichos medios de ajuste son adaptados para ajustar la longitud focal de la cámara, dichos medios de determinación de la configuración óptima comprenden los medios de determinación de la longitud focal óptima, y dichos medios de control son adaptados para controlar los medios de ajuste, medios de toma de imágenes, y medios de determinación de la óptima longitud focal para obtener y procesar imágenes en serie del objeto de referencia a diferentes longitudes focales respectivas, y para determinar la longitud focal óptima en la que el objeto de referencia está en el mejor enfoque, y para controlar los medios de ajuste después de eso para ajustar la longitud focal de la cámara a dicha longitud focal óptima.
4. Equipo de visión mecánico según la reivindicación 1, la reivindicación 2, o la reivindicación 3, caracterizado por el hecho de que dichos segundos medios de soporte son configurados para sostener un objeto de referencia que tiene sustancialmente la misma forma y el mismo tamaño en sustancialmente la misma orientación en dicho campo de vista que dicho artículo o varilla.
5. Equipo de visión mecánico según cualquier reivindicación precedente, caracterizado por el hecho de que dicha cámara comprende una cámara digital que se adapta de dicha imagen como una matriz regular de píxeles.
6. Equipo de visión mecánico según la reivindicación 5, caracterizado por el hecho de que dichos medios de determinación de configuración comprenden medios de determinación de la calibración que se adaptan para comparar un valor real medido de dicha al menos una dimensión de dicho objeto de referencia con dicho valor conocido con precisión, dichos medios de ajuste son adaptados para ajustar la calibración de dichos medios de toma de imágenes, y dichos medios de control son configurados para controlar dichos medios de toma de imágenes, medios de determinación de la calibración y medios de ajuste para medir al menos una dimensión de dicho objeto de referencia para obtener un valor medido, comparando dicho valor medido con el valor conocido con precisión, y ajustando la calibración de los medios de toma de imágenes por consiguiente de tal manera que el valor medido sea igual al valor conocido.
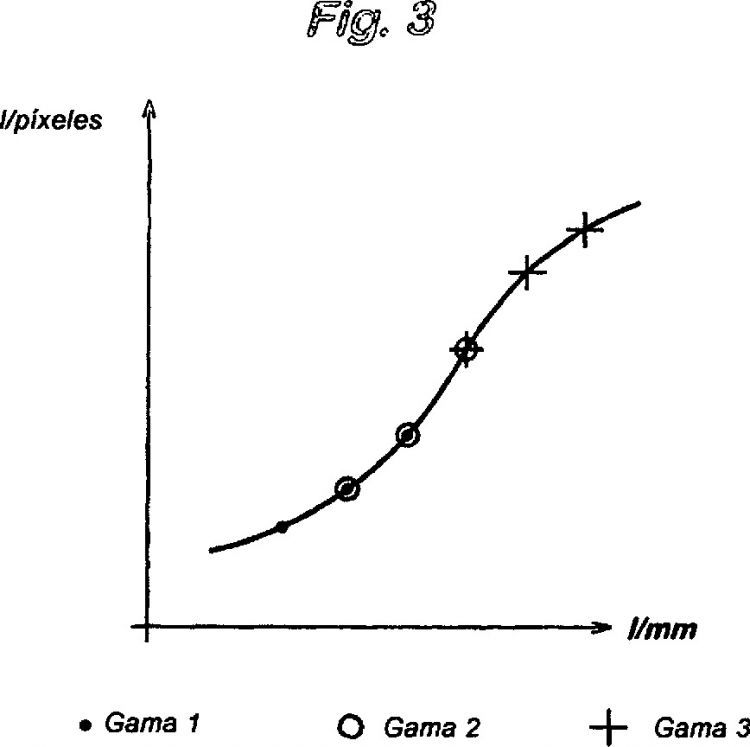
7. Equipo de visión mecánico según la reivindicación 6, caracterizado por el hecho de que dichos segundos medios de soporte son adaptados para sostener una pluralidad de objetos de referencia, teniendo cada uno sustancialmente la misma forma que dicho artículo o dicha varilla, pero teniendo cada uno un diferente valor respectivo conocido con precisión de dicha al menos una dimensión, dichos medios de movimiento son adaptados para mover selectivamente la cámara, los primeros medios de soporte y los segundos medios de soporte para llevar cada objeto de referencia a su vez al campo de vista de la cámara a dicha distancia predeterminada desde la cámara; y dichos medios de determinación de la calibración son adaptados para comparar el valor medido de dicha al menos una dimensión de cada objeto de referencia con el valor respectivo conocido con precisión, y para generar una curva de calibración para dichos medios de toma de imágenes basándose en dichas comparaciones.
8. Equipo de visión mecánico según la reivindicación 7, donde dichos segundos medios de soporte son adaptados para sostener tres o más objetos de referencia.
9. Equipo de visión mecánico según la reivindicación 8, donde cada objeto de referencia comprende una barra cilíndrica de diámetro conocido con precisión.
10. Equipo de visión mecánico según la reivindicación 9, caracterizado por el hecho de que dichos segundos medios de soporte comprenden al menos una agarradera para sostener cada objeto de referencia, definiendo cada agarradera una cavidad en forma de "V" que es configurada para recibir transversalmente una barra de referencia cilíndrica a cierta profundidad en la cavidad con independencia del diámetro de la barra.
11. Equipo de visión mecánico según la reivindicación 10, donde dichos segundos medios de soporte comprende dos agarraderas para sostener cada objeto de referencia, una agarradera en o hacia cada extremo de la barra respectiva.
12. Método para crear el equipo de visión mecánico según cualquiera de las reivindicaciones 1 a 11, comprendiendo dicho método:
13. Método según la reivindicación 12, caracterizado por el hecho de obtener y procesar una serie de imágenes de dicho objeto de referencia mientras se ajusta progresivamente la configuración de los medios de toma de imágenes, y determinando la configuración óptima basándose en dicha serie de imágenes.
14. Método según la reivindicación 13, caracterizado por el hecho de ajustar la longitud focal de la cámara durante la obtención y procesamiento de imágenes en serie del objeto de referencia para determinar la longitud focal óptima en la que el objeto de referencia está en el mejor enfoque; y después de eso ajustar la longitud focal de la cámara a dicha longitud focal óptima.
15. Método según la reivindicación 14, caracterizado por el hecho de colocar en dichos segundos medios de soporte un objeto de referencia que tiene sustancialmente la misma forma y el mismo tamaño en sustancialmente la misma orientación en dicho campo de vista que dicho artículo o dicha varilla.
16. Método según cualquiera de las reivindicaciones 12 a 15, caracterizado por el hecho de que dicha cámara comprende una cámara digital que se adapta para formar dicha imagen como una matriz regular de píxeles.
17. Método según cualquiera de las reivindicaciones 12 a 16, caracterizado por el hecho de obtener una imagen de dicho objeto de referencia y medir dicha al menos una dimensión, comparar el valor medido de dicha dimensión con el valor conocido con precisión, y después de eso ajustar la calibración de los medios de toma de imágenes de tal manera que el valor medido sea sustancialmente igual al valor conocido.
18. Método según la reivindicación 17, caracterizado por el hecho de sostener una pluralidad de objetos de referencia en dichos segundos medios de soporte, teniendo cada objeto de referencia sustancialmente la misma forma que dicho artículo o varilla, pero teniendo cada uno un diferente valor respectivo conocido con precisión de dicha al menos una dimensión, mover selectivamente uno o más de la cámara, de los primeros medios de soporte y de los segundos medios de soporte para llevar cada objeto de referencia a su vez al campo de vista de la cámara a dicha distancia predeterminada desde la cámara, comparar el valor medido de dicha al menos una dimensión de cada objeto de referencia con el respectivo valor conocido con precisión, y generar una curva de calibración para dichos medios de toma de imágenes con base en dichas comparaciones.
19. Método según la reivindicación 18, caracterizado por el hecho de sostener tres objetos de referencia en los segundos medio de soporte, y tomar la imagen de estos objetos de referencia para producir una curva de calibración basada en tres puntos.
20. Método según la reivindicación 19, donde cada objeto de referencia comprende una barra cilíndrica de diámetro conocido con precisión.
21. Método según la reivindicación 20 caracterizado por el hecho de sostener cada objeto de referencia en al menos una agarradera respectiva, definiendo dicha agarradera una cavidad en forma de "V" que se configura para recibir una barra de referencia transversal cilíndrica en la misma profundidad en la cavidad a pesar del diámetro de la barra.
22. Método según la reivindicación 21, donde dichos segundos medios de soporte comprenden dos agarraderas para sostener cada objeto de referencia, una agarradera en o hacia cada extremo de la barra respectiva.
Patentes similares o relacionadas:
DISPOSITIVO DE MEDICIÓN DE COTAS GEOMÉTRICAS, del 2 de Julio de 2020, de EMPRESA DE TRASPORTE MASIVO DEL VALLE DE ABURRA LTDA. - METRO DE MEDELLIN LTDA: La presente invención se refiere a dispositivos y métodos de medición de cotas geométricas en cables de un teleférico para verificar que el desplazamiento del cable […]
Sistema de captura y procesamiento de imágenes de perfiles de revolución en caliente, del 6 de Mayo de 2020, de FUNDACION TECNALIA RESEARCH & INNOVATION: Dispositivo de captura y procesamiento de imágenes para superficies calientes de perfiles de revolución , que comprende fuentes de iluminación lineal […]
Aparato y procedimiento para adquirir una imagen bidimensional de la superficie de un objeto tridimensional, del 1 de Abril de 2020, de Capsugel Belgium NV: Aparato para adquirir una imagen bidimensional de la superficie externa de un objeto tridimensional seleccionado de cápsulas del tipo utilizada en aplicaciones […]
Aparato para adquirir imágenes de elementos a inspeccionar y método de inspección de dichos elementos, del 11 de Marzo de 2020, de UTPVision S.r.l: Un aparato para obtener imágenes de un elemento a inspeccionar, que comprende: - una primera unidad óptica , que comprende a su vez: - primeros […]
Método de inspección de cigarrillos, del 8 de Mayo de 2019, de JAPAN TOBACCO INC.: Un método para detectar un error de alimentación de cigarrillos en exceso usando un aparato de inspección de cigarrillos, que comprende las etapas de: captar una imagen […]
Detector móvil y métodos para inspeccionar objetos alargados similares a un tubo en un equipo, del 27 de Febrero de 2019, de Rayong Engineering And Plant Service Co., Ltd: Un aparato montado alrededor de un objeto alargado similar a un tubo para inspeccionar dicho objeto alargado similar a un tubo, comprendiendo el aparato: - un […]
Dispositivo y procedimiento de toma de imágenes de un objeto, del 20 de Noviembre de 2018, de Shakti: Dispositivo de toma de imágenes de un objeto , caracterizado por que incluye: - una óptica reflectiva que se extiende alrededor de un eje […]
EQUIPO DE INSPECCIÓN DE SOLDADURA, del 6 de Febrero de 2017, de UNIVERSIDAD DE SALAMANCA: Equipo de inspección de soldadura para inspección de cordones de soldadura en tuberías que permite obtener datos más fiables y evita el desplazamiento del […]