JUGUETE.
Juguete, que comprende, en combinación,
- una parte autónoma móvil (3),
y
- una pieza independiente (2) a buscar, en el que
- la parte independiente a buscar dispone de medios (21, 22, 23, 24 y 25) para emitir al menos una señal inalámbrica, y
- la parte autónoma móvil comprende:
- medios (341, 342, 343) para recibir una señal o señales procedentes de la pieza a buscar;
- medios (31, 32, 33, 321, 311) de desplazamiento;
- medios para buscar la procedencia de dicha señal o señales de la pieza a buscar;
- medios (31, 32) para dirigir la parte móvil hacia el lugar de procedencia de las señales, caracterizado porque comprende un mando de usuario (1) y porque la parte autónoma móvil comprende además:
- medios (344) para recibir órdenes del mando de usuario, y
- medios (34) para recoger la pieza a buscar y acercarla al usuario
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07380296.
Solicitante: IMC. TOYS S.A..
Nacionalidad solicitante: España.
Inventor/es: FERNANDEZ RODRIGUEZ,MIGUEL ANGEL, NUÑEZ SERRANO,SERGIO, GOMEZ HUMET,BLAI, NOGUER DE PALOL,JOAN, CHUN HUNG,TSANG, BRU CERVERA,ALBERT, PUIG PASCUAL,JOAN, LEVY BOTBOL,JACOB.
Fecha de Publicación: .
Fecha Solicitud PCT: 31 de Octubre de 2007.
Fecha Concesión Europea: 14 de Octubre de 2009.
Clasificación Internacional de Patentes:
- A63H11/00 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63H JUGUETES, p. ej. TROMPOS, MUÑECOS, AROS O JUEGOS DE CONSTRUCCION. › Figuras que se desplazan por sí mismas.
- A63H30/04 A63H […] › A63H 30/00 Dispositivos de control a distancia especialmente adaptados para los juguetes, p. ej. para vehículos (mecanismos de dirección de control a distancia para vehículos de juguete A63H 17/385; para ferrocarriles en modelos reducidos A63H 19/24, A63H 19/28). › por transmisión sin hilos.
Clasificación PCT:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Juguete.
La presente invención hace referencia a un juguete.
Más en particular, la presente invención hace referencia a un juguete novedoso que comprende una parte móvil destinada a buscar un objeto y acercarlo al usuario.
En el mercado actual del juguete existe un gran número de dispositivos electrónicos con movimientos, incluyendo dispositivos que interactúan con el usuario, como es el caso de los denominados animatronics.
Por otro lado, son conocidos juguetes de bajo peso con capacidad de movimiento y un dispositivo atrapaobjetos. Sin embargo, dichos juguetes deben ser dirigidos por el usuario hasta el objetivo, quien debe dar la orden de atrapar el objeto y de transportarlo hasta la posición deseada.
También son conocidos juguetes que siguen una señal correspondiente al usuario.
El documento EP106497A1 da a conocer un juguete según la parte precaracterizante de la reivindicación 1 que consiste en un muñeco gateador móvil independiente y un oso de peluche, que debe ser encontrado, en el que la figura del oso de peluche posee transmisores infrarrojos y el muñeco gateador comprende dos sensores ubicados en la frente del muñeco para la recepción de una señal infrarroja proveniente del oso de peluche, unos mecanismos de gateo con dos motores laterales independientes y un dispositivo electrónico que controla los motores dependiendo de qué sensor está recibiendo la señal, de manera que el muñeco gateador busca el oso de peluche. El muñeco simplemente se acerca al oso de peluche de forma automática.
El documento US2003/0045203 da a conocer un robot complicado y de alto coste que tiene una capacidad de interacción con otros robots. Con el fin de lograr esto, el robot comprende un sistema de reconocimiento de imágenes para detectar salidas de otros robot mascota, así como un software complicado para la distinción de la naturaleza de otras mascotas y cambiar de manera consecuente su propio carácter.
Sin embargo, ninguno de los juguetes existentes es capaz, de una manera autónoma, de detectar un objeto, atraparlo autónomamente y después llevarlo hasta el usuario.
El juguete objeto de la presente invención se comporta como lo haría un perro de compañía, es decir, cuando el usuario lanza un objeto, la parte móvil busca el objeto lanzado, lo recoge y lo acerca al usuario.
De esta manera, el juguete interactúa de manera activa con el usuario, de manera similar a como lo haría un animal de compañía.
En una realización básica, el juguete objeto de la presente invención comprende un juguete según la reivindica- ción 1.
Estas características permiten al juguete objeto de la presente invención tomar decisiones autónomas en tiempo real para la consecución de su objetivo (buscar la pieza a buscar que ha sido previamente lanzada por el usuario), interactuando con el usuario a través de un tercer objeto (la pieza a buscar).
A diferencia de otros juguetes, el juguete objeto de la presente invención presenta capacidad de decisión en tiempo real, sin necesidad de que el usuario tome decisiones sobre la ruta a recorrer para recoger la pieza a buscar, incluso en situaciones inicialmente no previstas. Para ello, preferentemente, los medios para buscar la procedencia de la señal y los medios para dirigir la parte móvil hacia el lugar de procedencia de las señales y los medios para recoger la pieza a buscar y acercarla al usuario disponen de medios de decisión independientes del mando del usuario, dichos medios de decisión podrán comprender, por ejemplo, un microcontrolador, una placa y una memoria electrónica.
La existencia de emisores en la pieza a buscar permite una construcción económica y simplificada del juguete, lo que resulta de suma importancia para su aplicación práctica. Preferentemente, dichos emisores serán de tipo infrarrojo y se dispondrá más de uno para poder asegurar una recepción de la señal con independencia de la posición que adopte la pieza a buscar una vez lanzada. Para evitar interferencias, el receptor de infrarrojos de la parte autónoma móvil destinado a recibir la señal o señales de la pieza a buscar presentará un filtro de paso de banda para evitar interferencias provenientes de otras fuentes de infrarrojos, cuya frecuencia no coincida con el emisor.
De manera especialmente preferente, la presente invención prevé que dicho receptor de infrarrojos sea únicamente capaz de captar señales provenientes de la dirección perpendicular al plano frontal del receptor. Esta característica simplifica enormemente los requerimientos computacionales y de sistemas del juguete, por cuanto el juguete se dirigirá frontalmente hacia el objeto a buscar.
El mando de usuario podrá tratarse preferentemente de un mando a distancia, con las funciones principales de encendido del juguete y, opcionalmente, de emitir una orden de vuelta hacia el usuario para la parte móvil.
En cuanto a la parte móvil, está podrá presentar, por ejemplo, forma de animal o similar, por ejemplo un perro, por cuanto su comportamiento es similar al de un perro de compañía.
Preferentemente, los medios para buscar la procedencia de la señal o señales de la pieza a buscar comprenden medios para que la parte móvil gire 360º en torno a un eje hasta encontrar la citada señal o señales. Esta característica permite simplificar tanto el juguete como la búsqueda de la pieza a buscar. Para conseguir dicho giro de 360º, por ejemplo, los citados medios para desplazarse preferentemente comprenderán un sistema de dos ruedas, disponiendo cada una un motor independiente, y una rueda loca o pivote.
Para dotar de autonomía y capacidad de toma de decisiones a la parte móvil, de cara a buscar la procedencia de la señal de la pieza a buscar, dirigirse hacia la misma, evitar colisiones con obstáculo, ésta comprenderá al menos un dispositivo de control, que preferentemente comprenderá un microcontrolador, una placa y una memoria electrónica para almacenamiento de instrucciones.
Para evitar colisiones con obstáculos en el camino, la parte móvil podrá comprender sensores de detección, preferentemente de tipo infrarrojo y un sistema de control de la velocidad y dirección gobernado por un dispositivo de control.
Los medios para recoger la pieza a buscar, en una opción de diseño extremadamente sencilla, comprenderán una concavidad, o bien también podrán comprender un medio de captura de la pieza a buscar. También podrá comprender un sistema sensor para detectar la pieza a buscar una vez se encuentra ésta situada en los citados medios para recoger la pieza.
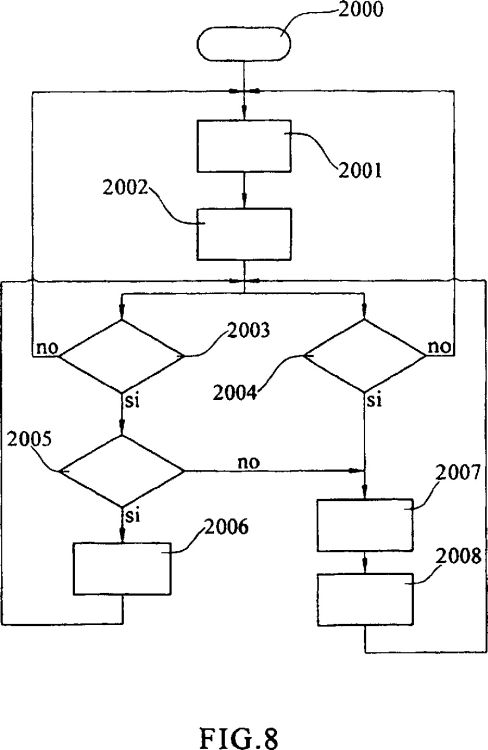
El dispositivo de control comprenderá medios (en forma de circuitos, instrucciones en memoria, o cualquier otro medio) para que el juguete efectúe sucesivamente y de forma autónoma las siguientes operaciones:
- - buscar la señal de la pieza a buscar
- - desplazarse hasta la pieza a buscar
- - capturar la pieza a buscar
- - opcionalmente, mantener la posición de reposo hasta recibir una orden del mando del usuario, y
- - acercar la pieza al usuario.
Para una mejor compresión de la invención, se adjunta a título de ejemplo explicativo pero no limitativo, unos dibujos de una realizaciones de la presente invención.
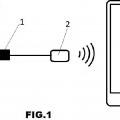
La figura 1 es una vista en alzado frontal de una representación esquemática de una posible realización de un juguete según la presente invención. En ella se han representado los elementos funcionales de la parte móvil, con una carcasa exterior en línea discontinua.
La figura 2 es una vista en perspectiva de una representación esquemática de elementos funcionales de un frontal de una posible realización de juguete según la presente invención, carente de la parte decorativa.
En la figura 3 es un vista esquemática en la que se muestra la detección de la parte a buscar del juguete por parte de la parte móvil del mismo.
La figura 4 es una vista esquemática de elementos dispuestos en la base de una realización de juguete según la presente invención y que permiten dotar al juguete de una movilidad adecuada.
Las figuras 5, 6 y 7 son figuras esquemáticas que muestran un posible modo de utilización del juguete según la presente invención.
La figura 8 es un diagrama de bloque de un procedimiento llevado a cabo por un juguete según...
Reivindicaciones:
1. Juguete, que comprende, en combinación,
- - una parte autónoma móvil (3), y
- - una pieza independiente (2) a buscar,
en el que
- - la parte independiente a buscar dispone de medios (21, 22, 23, 24 y 25) para emitir al menos una señal inalámbrica, y
- - la parte autónoma móvil comprende:
- - medios (341, 342, 343) para recibir una señal o señales procedentes de la pieza a buscar;
- - medios (31, 32, 33, 321, 311) de desplazamiento;
- - medios para buscar la procedencia de dicha señal o señales de la pieza a buscar;
- - medios (31, 32) para dirigir la parte móvil hacia el lugar de procedencia de las señales, caracterizado porque comprende un mando de usuario (1) y porque la parte autónoma móvil comprende además:
- - medios (344) para recibir órdenes del mando de usuario, y
- - medios (34) para recoger la pieza a buscar y acercarla al usuario.
2. Juguete, según la reivindicación 1, caracterizado porque los medios (43) para buscar la procedencia de la señal y los medios (31, 32) para dirigir la parte móvil hacia el lugar de procedencia de las señales y los medios para recoger la pieza a buscar y acercarla al usuario disponen de medios de decisión independientes del mando del usuario.
3. Juguete, según la reivindicación 1 ó 2, caracterizado porque la pieza independiente (2) a buscar dispone de al menos un emisor (21, 22, 23, 24, 25) de infrarrojos, y la parte (3) autónoma móvil dispone de al menos un receptor (344) de infrarrojos capaz de captar la señal procedente de la pieza independiente a buscar.
4. Juguete, según la reivindicación 3, caracterizado porque el receptor (344) de infrarrojos es capaz de captar una señal proveniente de la dirección perpendicular al plano frontal del receptor.
5. Juguete, según las reivindicaciones 3 ó 4, caracterizado porque el receptor (344) presenta un filtro de paso de banda para filtrar señales de infrarrojos, cuya frecuencia no coincide con la del emisor.
6. Juguete, según alguna de las reivindicaciones 3 a 5, caracterizado porque la pieza independiente (2) presenta una pluralidad de emisores de infrarrojos.
7. Juguete, según cualquiera de las reivindicaciones 1 a 6, caracterizado porque la pieza (2) a buscar presenta forma de pelota.
8. Juguete, según cualquiera de las reivindicaciones 1 a 7, caracterizado porque el mando (1) de usuario es un mando a distancia.
9. Juguete, según cualquiera de las reivindicaciones 1 a 8, caracterizado porque la parte (3) autónoma móvil presenta forma externa de animal.
10. Juguete, según cualquiera de las reivindicaciones 1 a 9, caracterizado porque los citados medios (31, 32, 33, 321, 311) de desplazamiento comprenden un sistema de dos ruedas, disponiendo cada una de un motor independiente, y una rueda loca o pivote, de tal manera que la parte móvil puede girar 360º alrededor del citado pivote.
11. Juguete, según cualquiera de las reivindicaciones 1 a 10, caracterizado porque los medios (31, 32, 33, 321, 311) de desplazamiento comprenden un sistema de control de la velocidad y el desplazamiento de la parte móvil.
12. Juguete, según cualquiera de las reivindicaciones 1 a 11, caracterizado porque el citado sistema (311) de control de la velocidad y el desplazamiento comprende al menos un encóder óptico.
13. Juguete, según cualquiera de las reivindicaciones 1 a 12, caracterizado porque los medios para buscar la procedencia de la señal o señales de la pieza a buscar comprenden un dispositivo de control electrónico.
14. Juguete, según cualquiera de las reivindicaciones 1 a 13, caracterizado porque los medios para buscar la procedencia de la señal o señales de la pieza a buscar comprenden medios para que la parte móvil gire 360º en torno a un eje hasta encontrar la citada señal o señales.
15. Juguete, según cualquiera de las reivindicaciones 1 a 14, caracterizado porque comprende sensores (341, 342, 343) para detectar obstáculos.
16. Juguete, según la reivindicación 15, caracterizado porque comprende medios de control electrónico para variar el movimiento para no colisionar con un objeto detectado por los sensores (341, 342, 343) para detectar obstáculos.
17. Juguete, según las reivindicaciones 15 ó 16, caracterizado porque los sensores para detectar obstáculos son sensores (341, 342, 343) de infrarrojos.
18. Juguete, según cualquiera de las reivindicaciones 1 a 17, caracterizado porque los medios (34) para recoger la pieza a buscar comprenden una concavidad.
19. Juguete, según cualquiera de las reivindicaciones 1 a 18, caracterizado porque los medios (34) para recoger la pieza a buscar comprenden medios de captura de la pieza a buscar.
20. Juguete, según cualquiera de las reivindicaciones 1 a 19, caracterizado porque la parte móvil (3) comprende un sistema sensor para detectar una pieza a buscar situada en los medios para recoger la pieza a buscar.
21. Juguete, según cualquiera de las reivindicaciones 1 a 20, caracterizado porque la parte móvil comprende un dispositivo de control que controla y coordina sus partes.
22. Juguete, según la reivindicación 21, caracterizado porque el dispositivo de control comprende al menos una placa, un microcontrolador y un dispositivo de memoria electrónica con instrucciones de funcionamiento del microcontrolador.
23. Juguete, según la reivindicación 21 ó 22, caracterizado porque el dispositivo de control comprende medios para que el juguete efectúe sucesivamente y de forma autónoma las siguientes operaciones:
- - buscar la señal de la pieza a buscar
- - desplazarse hasta la pieza a buscar
- - capturar la pieza a buscar
- - acercar la pieza a buscar al usuario.
24. Juguete, según la reivindicación 23, caracterizado porque el dispositivo de control comprende medios para mantener en posición de reposo la parte móvil tras capturar la pieza a buscar hasta que se recibe una orden del mando (1) de usuario.
Patentes similares o relacionadas:
Técnicas de efectos especiales, del 1 de Abril de 2020, de Universal City Studios LLC: Un sistema de efectos especiales que comprende: un controlador de tierra; un vehículo (18a-18g) aéreo no tripulado; circuitería de comunicaciones […]
Juguete, del 23 de Mayo de 2018, de Stadlbauer Marketing + Vertrieb GmbH: Sistema con una pista conectada a una fuente de energía eléctrica, al menos, un vehículo para funcionar sobre la pista , al menos, un controlador manual […]
Aparato de propulsión y procedimiento de uso, del 24 de Mayo de 2017, de DaVinci Engineering Limited: Aparato de propulsión para un juguete , comprendiendo el aparato de propulsión: un elemento de accionamiento […]
Método y un dispositivo para controlar una muñeca con una aplicación y operar la muñeca interactiva, del 21 de Septiembre de 2016, de Mooredoll Inc: Un método para controlar una muñeca con una aplicación (APP) , comprende: conectar una muñeca a través de un módulo de red inalámbrica de un […]
 Método y sistema de cronometraje para vehículos radio controlados y tripulados en circuitos, del 26 de Octubre de 2015, de FUSTER GINER, Andrés: Método y sistema de cronometraje para vehículos radio controlados y tripulados mediante un sensor óptico conectado con un procesador y comunicado […]
Método y sistema de cronometraje para vehículos radio controlados y tripulados en circuitos, del 26 de Octubre de 2015, de FUSTER GINER, Andrés: Método y sistema de cronometraje para vehículos radio controlados y tripulados mediante un sensor óptico conectado con un procesador y comunicado […]
Sistema distribuido de vehículos de juguete controlados de forma autónoma, del 8 de Julio de 2015, de Anki, Inc: Un sistema de juguete incluyendo: una superficie de circulación compuesta de una pluralidad de segmentos, donde cada segmento incluye marcas que codifican […]
Juguete, del 26 de Marzo de 2014, de Stadlbauer Marketing + Vertrieb GmbH: Juguete con una pista acoplada a una fuente de energia eléctrica, por lo menos un vehículo para su funcionamiento sobre la pista , así como por lo menos […]
Sistema de estabilización para cuerpos voladores, del 14 de Marzo de 2012, de REICH, STEFAN: Procedimiento de estabilización de un vehículo con un motor propio o diseñado como un cuerpo volador que se puede controlar mecánicamente mediante un circuito de regulación […]