DISPOSITIVO DE DISGREGACION DE RESIDUOS DE ALIMENTO CON MOTOR DE VELOCIDAD VARIABLE Y PROCEDIMIENTOS DE OPERACION.
Un dispositivo de disgregación de residuos de alimentos (100) que comprende:
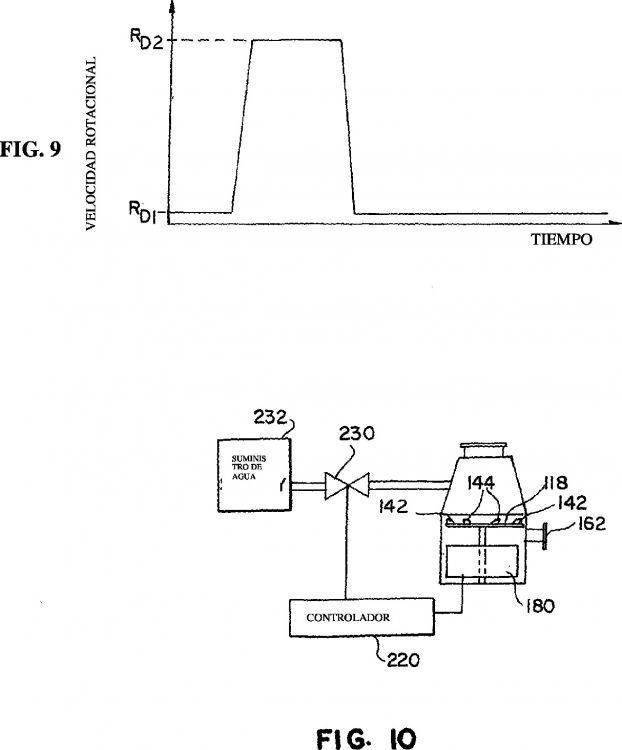
un motor (180) que tiene un rotor (184), impartiendo el motor (180) un movimiento rotacional a un eje giratorio (126) acoplado al rotor (184); un mecanismo de trituración que tiene un conjunto de placa troceadora (118) acoplado al eje giratorio (126) para triturar residuos de alimentos; y un controlador (220) que mantiene automática y secuencialmente el movimiento rotacional del conjunto de placa troceadora (118) del mecanismo de trituración a una primera velocidad giratoria durante un primer periodo de tiempo y una segunda velocidad rotacional durante un segundo periodo de tiempo
Tipo: Resumen de patente/invención. Número de Solicitud: W0144609US.
Solicitante: EMERSON ELECTRIC CO..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 8000 W. FLORISSANT AVENUE,ST. LOUIS MISSOURI 63136.
Inventor/es: BERGER,THOMAS,R, ANDERSON,SCOTT,W, STRUTZ,WILLIAM,F.
Fecha de Publicación: .
Fecha Concesión Europea: 30 de Septiembre de 2009.
Clasificación Internacional de Patentes:
- B02C18/24 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B02 TRITURACION, REDUCCION A POLVO O DESINTEGRACION; TRATAMIENTO PREPARATORIO DE LOS GRANOS PARA LA MOLIENDA. › B02C TRITURACION, REDUCCION A POLVO O DISGREGACION EN GENERAL; MOLIENDA DE GRANOS (obtención de polvo metálico por trituración, trabajo con muela o molido B22F 9/04). › B02C 18/00 Disgregación por medio de cuchillos u otros elementos cortantes o desgarrantes que transforman el material en fragmentos (corte B26D ); Tajadoras o aparatos similares que utilizan tornillos o análogos (máquinas de uso doméstico no previstas en otro lugar A47J 43/04; máquinas de usos múltiples para preparar alimentos A47J 44/00). › Transmisiones.
- E03C1/266B
Clasificación PCT:
- E03C1/266 CONSTRUCCIONES FIJAS. › E03 SUMINISTROS DE AGUA; EVACUACION DE AGUAS. › E03C INSTALACIONES DOMESTICAS DE FONTANERIA PARA LA ALIMENTACION O LA EVACUACION DE AGUA (no vinculadas a las canalizaciones de alimentación o de evacuación de agua A47K; dispositivos de este género utilizados en el suelo E03B, E03F ); SUMIDEROS. › E03C 1/00 Instalaciones de fontanería doméstica para alimentación de agua o para la evacuación de aguas usadas; Sumideros. › Disposición de aparatos de desintegración en canalizaciones de evacuación; Aparatos de desintegración especialmente adaptados para su instalación en canalizaciones de evacuación.
Clasificación antigua:
- B02C23/36 B02C […] › B02C 23/00 Procedimientos auxiliares, dispositivos auxiliares o accesorios especialmente adaptados al triturado o la disgregación no previstos en los grupos B02C 1/00 - B02C 21/00 o no adaptados especialmente a los equipos cubiertos por uno solo de los grupos B02C 1/00 - B02C 21/00 (separación y clasificación en general B03, B04, B07). › la zona de triturado o de disgregación está sumergida en un líquido.
Fragmento de la descripción:
Dispositivo de disgregación de residuos de alimento con motor de velocidad variable y procedimientos de operación.
Ámbito de la invención
La presente invención se refiere generalmente a dispositivos de disgregación de residuos de alimentos y, más concretamente, a un triturador de alimentos que tiene un motor de velocidad variable como una máquina de reluctancia conmutada.
Antecedentes de la invención
La precisión y duración de la trituración de residuos de alimentos son consideraciones importantes en el diseño y operación de un triturador. Muchos dispositivos de disgregación de residuos de alimentos convencionales utilizan un motor de inducción de velocidad única que rota una placa de trituración para triturar los residuos de alimentos. La velocidad rotacional de la placa de trituración para la mayoría de los dispositivos de disgregación de residuos de alimentos se sitúa entre las 1700 y 1800 rotaciones por minuto (RPM). Un dispositivo de disgregación de residuos de alimentos que tiene un motor de inducción se divulga en la patente estadounidense nº 6,007,006 (Engel et al.), que es propiedad del cesionario de la presente solicitud y se incorpora a la presente por referencia en su totalidad.
Se ha observado que la velocidad rotacional seleccionada de la placa de trituración puede afectar al rendimiento de trituración del triturador de determinados tipos de alimentos. Por ejemplo, las partículas de alimentos más duras, como trozos de zanahorias y fragmentos de huesos pueden "montarse" sobre la placa de trituración a altas velocidades rotacionales. Esto ocurre cuando las partículas de alimentos giran a la misma velocidad que la placa de trituración sin ser trituradas. Esto provoca un mayor ruido y vibración, además de que se acumulan residuos de alimentos residuales en la cámara de trituración después de apagar el triturador. Con el tiempo, los alimentos residuales pueden causar olores desagradables. Por ellos, existe la necesidad de un dispositivo de disgregación de residuos de alimentos con un mecanismo para garantizar que todos los alimentos se eliminan de la cámara de trituración. El flujo reducido en los conductos de drenaje es otra consideración importante en el diseño de un dispositivo de disgregación de residuos de alimentos. Una cámara de trituración de un triturador de alimentos puede llenarse con alimentos antes de que el usuario encienda el triturador. Por ejemplo, un usuario puede llenar la cámara de trituración con peladuras de patillata antes de activar el triturador. Cuando el dispositivo de disgregación de residuos de alimentos convencional se enciende y se dirige inmediatamente a una velocidad rotacional alta, puede forzarse una gran cantidad de alimentos hacia el conducto de descarga o drenaje. Esto puede reducir el flujo de drenaje. De este modo, es necesario que el dispositivo de disgregación de residuos de alimentos pueda evitar que una gran cantidad de residuos de alimentos se fuerce hacia el conducto de drenaje durante el arranque.
Otro motivo de preocupación con los trituradores convencionales es el ruido y el consumo de energía. La velocidad rotacional típica de la placa de trituración para trituradores convencionales se fija a una velocidad relativamente alta. Las velocidades giratorias mayores pueden producir más ruido y consumir más energía. Puede haber veces en las que el triturador no esté triturando alimentos pero sigue encendido y en funcionamiento. Por ejemplo, si un usuario está limpiando la mesa de la cena, puede haber veces en las que el triturador esté en marcha pero no haya alimentos en el triturador. Sería ventajoso reducir la velocidad causada durante los periodos de inactividad. De este modo, existe la necesidad de un triturador que reduzca la velocidad y el consumo de energía durante periodos de inactividad.
Un problema adicional al diseñar un dispositivo de disgregación de residuos de alimentos son las obstrucciones. En un dispositivo de disgregación de residuos de alimentos convencional, los residuos de alimentos son forzados por patillas en una placa de trituración giratoria contra los dientes de un anillo troceador fijo. Las obstrucciones se producen cuando entran objetos duros, como los huesos, en el dispositivo de disgregación de residuos de alimentos y se atascan entre las patillas de la placa de trituración giratoria y el anillo troceador fijo. La técnica anterior ha intentado resolver la obstrucción utilizando motores que pueden encenderse manualmente para girar en la dirección opuesta. Sin embargo, existe una necesidad de que el dispositivo de disgregación de residuos de alimentos pueda corregirse automáticamente por sí mismo si se produce una obstrucción.
El documento US 3,300,150 se refiere a un triturador de residuos de basura que tiene un motor que imparte un movimiento giratorio a un rotor del motor. El motor acciona un mecanismo de trituración que incluye un troceador. Puede utilizarse un botón de control manual para cambiar la velocidad del motor de acuerdo con el tipo de residuo que va a triturarse.
La presente invención se propone superar, o al menos reducir los efectos de, una o más de las condiciones establecidas anteriormente.
Resumen de la invención
La presente invención se establece en las reivindicaciones independientes. Las características preferentes u opcionales se establecen en las reivindicaciones dependientes de las mismas.
Con tal fin, la presente invención proporciona un dispositivo de disgregación de residuos de alimentos que tiene una sección superior de transporte de alimentos, una sección de motor, una sección de trituración central y un controlador. La sección superior de transporte de alimentos incluye un alojamiento que forma una entrada para recibir los residuos de alimentos. La sección del motor incluye una máquina de reluctancia conmutada que tiene un rotor y un estator. El rotor imparte movimiento rotacional a un eje giratorio. La sección de trituración central está dispuesta entre la sección de transporte de alimentos y la sección del motor. La sección de transporte del motor transporta residuos de alimentos a la sección de trituración. La sección de trituración incluye un mecanismo de trituración en el que una parte del mecanismo de trituración está montado en el eje giratorio. El controlador está conectado eléctricamente al estator para controlar la máquina de reluctancia conmutada. El controlador es capaz de dirigir el movimiento giratorio al eje giratorio y la parte del mecanismo de trituración montada en el eje giratorio. Asimismo, el controlador es capaz de mantener el movimiento giratorio del eje giratorio a más de una velocidad rotacional y dirección.
El mecanismo de trituración del dispositivo de disgregación de residuos de alimentos puede incluir un conjunto de placa troceadora y un anillo troceador fijo. En dicha realización, el conjunto de placa troceadora es la parte del mecanismo de trituración montado en el eje giratorio. El conjunto de la placa troceadora puede incluir patillas de trituración fija o patillas móviles.
En una realización adicional, la presente invención incluye un dispositivo de disgregación de residuos de alimentos que tiene una sección superior de transporte de alimentos, una sección de motor, una sección de trituración central y un controlador. La sección del motor incluye un motor de velocidad variable que tiene un rotor y un estator. El rotor imparte un movimiento giratorio a un eje giratorio que gira una parte de un mecanismo de trituración que está situado en la sección de trituración central. El controlador está conectado eléctricamente al estator para controlar el motor de velocidad variable. El controlador es capaz de funcionar en una variedad de modos, que incluye el modo de arranque suave, modo de trituración optimizada, modo de marcha lenta, modo de enjuagado y modo anti-obstrucción. Por ejemplo, en una realización del modo de arranque suave, el controlador es capaz de activar el motor de velocidad variable al arrancar para girar una parte del mecanismo de trituración montado en el eje giratorio y aumentar lentamente la velocidad rotacional de la parte del mecanismo de trituración a una tasa giratoria predeterminada durante un periodo predeterminado de tiempo. En una realización del modo de trituración optimizada, el controlador es capaz de girar la parte del mecanismo de trituración montado en el eje giratorio a una primera velocidad rotacional durante un primer periodo de tiempo y girar la parte del mecanismo de trituración a una segunda velocidad rotacional durante un segundo periodo de tiempo. En una realización del modo de marcha lenta,...
Reivindicaciones:
1. Un dispositivo de disgregación de residuos de alimentos (100) que comprende: un motor (180) que tiene un rotor (184), impartiendo el motor (180) un movimiento rotacional a un eje giratorio (126) acoplado al rotor (184); un mecanismo de trituración que tiene un conjunto de placa troceadora (118) acoplado al eje giratorio (126) para triturar residuos de alimentos; y un controlador (220) que mantiene automática y secuencialmente el movimiento rotacional del conjunto de placa troceadora (118) del mecanismo de trituración a una primera velocidad giratoria durante un primer periodo de tiempo y una segunda velocidad rotacional durante un segundo periodo de tiempo.
2. El dispositivo de disgregación de residuos de alimentos de la reivindicación 1, en el que la primera velocidad de rotación es mayor que o menor que la segunda velocidad de rotación.
3. El dispositivo de disgregación de residuos de alimentos de la reivindicación 1 en el que el controlador (220) mantiene secuencialmente el movimiento rotacional del conjunto de placa troceadora (118) del mecanismo de trituración a una tercera velocidad rotacional durante un tercer periodo de tiempo.
4. El dispositivo de disgregación de residuos de alimentos 3, en el que la primera velocidad rotacional es mayor que o menor que la segunda velocidad rotacional y la tercera velocidad rotacional es mayor que la tercera velocidad rotacional.
5. El dispositivo de disgregación de residuos de alimentos de la reivindicación 4, en el que la primera y tercera velocidades rotacionales son iguales.
6. El dispositivo de disgregación de residuos de alimentos de cualquier reivindicación precedente, en el que el controlador (220) está acoplado eléctricamente al motor (180) y cambia de manera controlable la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración a una tasa rotacional predeterminada durante un periodo de tiempo predeterminado.
7. El dispositivo de disgregación de residuos de alimentos de la reivindicación 6 en el que el controlador (220) aumenta de forma controlable la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración a una tasa rotacional predeterminada durante un periodo de tiempo predeterminado.
8. El dispositivo de disgregación de residuos de alimentos de las reivindicaciones 6 ó 7 en el que el controlador (220) aumenta la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración desde una posición estática.
9. El dispositivo de disgregación de residuos de alimentos de cualquier reivindicación precedente, en el que el motor (180) incluye además un estator (182) y en el que el controlador está acoplado eléctricamente al estator.
10. El dispositivo de disgregación de residuos de alimentos de cualquier reivindicación precedente, en el que el controlador (220) está acoplado eléctricamente al motor (180), y en el que el controlador (220) determina la presencia de residuos de alimentos en el dispositivo de disgregación de residuos de alimentos (100).
11. El dispositivo de disgregación de residuos de alimentos de la reivindicación 10, en el que el controlador (220) cambia una velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración cuando entran y/o salen residuos de alimentos del dispositivo de disgregación de residuos de alimentos (100).
12. El dispositivo de disgregación de residuos de alimentos de la reivindicación 11, en el que el controlador (220) aumenta una velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración cuando los residuos de alimentos entran en el dispositivo de disgregación de residuos de alimentos (100) y/o disminuye la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración cuando los residuos de alimentos salen del dispositivo de disgregación de residuos de alimentos(100).
13. El dispositivo de disgregación de residuos de alimentos de cualquiera de las reivindicaciones 10 a 12 en las que el motor (180) incluye asimismo un estator (182) y en el que el controlador (220) determina la presencia de residuos de alimentos en el dispositivo de disgregación de residuos de alimentos (100) controlando la corriente en el estator (182).
14. El dispositivo de disgregación de residuos de alimentos de la reivindicación 13, en el que el controlador (220) aumenta la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración cuando los residuos de alimentos entran en el dispositivo de disgregación de residuos de alimentos (100) al determinar que aumentó la corriente del estator, y/o disminuye la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración cuando los residuos de alimentos salen del dispositivo de disgregación de residuos de alimentos (100), al determinar que disminuyó la corriente del estator.
15. El dispositivo de disgregación de residuos de alimentos de la reivindicación 14 en el que el controlador (220) disminuye la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración a una velocidad rotacional predeterminada.
16. El dispositivo de disgregación de residuos de alimentos de la reivindicación 15, en el que el controlador (220) aumenta la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración a una primera velocidad rotacional predeterminada, y en el que el controlador (220) disminuye la velocidad rotacional del conjunto de placa troceadora del mecanismo de trituración a una segunda velocidad rotacional predeterminada, en el que la primera velocidad rotacional es mayor que la segunda velocidad rotacional.
17. El dispositivo de disgregación de residuos de alimentos de cualquier reivindicación precedente, que comprende además una entrada para proporcionar agua al mecanismo de trituración, en el que el controlador está acoplado eléctricamente al motor y cambia una velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración cuando se proporciona agua a través de la entrada de agua.
18. El dispositivo de disgregación de residuos de alimentos de la reivindicación 17, en el que el controlador (220) aumenta una velocidad rotacional del conjunto de placa troceadora (188) del mecanismo de trituración a una primera velocidad rotacional cuando se proporciona agua a través de la entrada de agua; o aumenta una velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración desde una primera velocidad rotacional a una segunda velocidad rotacional cuando se proporciona agua desde la entrada de agua.
19. El dispositivo de disgregación de residuos de alimentos de las reivindicaciones 17 ó 18 en el que el controlador (220) aumenta la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración durante un periodo de tiempo predeterminado.
20. El dispositivo de disgregación de residuos de alimentos de cualquiera de las reivindicaciones 17 a 19 en el que el controlador (220) aumenta la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración cuando se proporciona agua a través de la entrada de agua antes de apagar el dispositivo.
21. El dispositivo de disgregación de residuos de alimentos de cualquiera de las reivindicaciones 17 a 20, que comprende además una válvula (230) controlada por el controlador (220) para proporcionar agua a la entrada de agua.
22. El dispositivo de disgregación de residuos de alimentos de cualquier reivindicación precedente, en el que el motor (180) es un motor de velocidad variable.
23. El dispositivo de disgregación de residuos de alimentos de la reivindicación 22, en el que el motor (180) es un motor de reluctancia conmutada, o un motor de imán permanente.
24. El dispositivo de disgregación de residuos de alimentos de cualquiera de las reivindicaciones 1 y 2 a 23, en el que el conjunto de placa troceadora (118) incluye patillas troceadoras (142).
25. El dispositivo de disgregación de residuos de alimentos de cualquiera de las reivindicaciones 1, 2 a 23 y 24 en las que el motor (180) está posicionado en una sección de alojamiento de motor (106) y en el que el mecanismo de trituración está posicionado en una sección de trituración (104), y en el que la sección de alojamiento del motor (106) y la sección de trituración (104) son adyacentes.
26. El dispositivo de disgregación de residuos de alimentos de la reivindicación 25, en el que la sección de trituración (104) comprende además un anillo troceador fijo (120).
27. El dispositivo de disgregación de residuos de alimentos de la reivindicación 26 ó 27, que comprende además una sección de transporte de alimentos (102) adyacente a la sección de trituración (104) para recibir residuos de alimentos.
28. Un procedimiento para operar un dispositivo de disgregación de residuos de alimentos (100) para procesar residuos de alimentos, teniendo el dispositivo de disgregación de residuos de alimentos un motor para impartir movimiento rotacional a un eje giratorio que está acoplado a un conjunto de placa troceadora (118) de un mecanismo de trituración, comprendiendo el procedimiento que consiste en variar de forma controlable y automática con un controlador de motor (220) la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración desde una primera velocidad rotacional a una segunda velocidad rotacional durante la operación del dispositivo de disgregación de residuos de alimentos (100).
29. El procedimiento de la reivindicación 28, en el que el motor (180) comprende además un estator (182) y en el que el controlador de motor (220) envía una corriente al estator (182) para variar de forma controlable la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración durante la operación del dispositivo de disgregación de residuos de alimentos (100).
30. El procedimiento de cualquiera de las reivindicaciones 28 y 29, en el que la variación de forma controlable de la velocidad rotacional del conjunto de placa troceadora (188) del mecanismo de trituración durante la operación del dispositivo de disgregación de residuos de alimentos (100) comprende el aumento de la velocidad rotacional desde la primera velocidad rotacional a una segunda velocidad rotacional; o disminución de la velocidad rotacional de la primera velocidad rotacional a la segunda velocidad rotacional.
31. El procedimiento de cualquiera de las reivindicaciones 28, 29 y 30, en el que la variación de la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración durante la operación del dispositivo de disgregación de residuos de alimentos (100) comprende el aumento de forma controlable de la velocidad rotacional durante un periodo de tiempo predeterminado.
32. El procedimiento de la reivindicación 31, en el que la velocidad rotacional aumenta de una posición fija a la primera velocidad rotacional.
33. El procedimiento de cualquiera de las reivindicaciones 28 y 29 a 32, en el que la variación de manera controlable de la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración durante la operación del dispositivo de disgregación de residuos de alimentos (100) comprende la variación de la velocidad rotacional cuando se introduce agua en el mecanismo de trituración para enjuagar el mecanismo de trituración.
34. El procedimiento de la reivindicación 33, en el que la velocidad rotacional aumenta cuando se introduce agua en el mecanismo de trituración.
35. El procedimiento de la reivindicación 34, en el que el procedimiento se realiza antes de apagar el dispositivo de disgregación de residuos de alimentos (100).
36. El procedimiento de cualquiera de las reivindicaciones 28, 29 a 32 y 33 a 35, en el que la variación de la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración durante la operación del dispositivo de disgregación de residuos de alimentos (100) se produce cuando los residuos de alimentos se obstruyen en el mecanismo de trituración.
37. El procedimiento de la reivindicación 36, en el que se invierte la dirección de rotación del conjunto de placa troceadora (118) del mecanismo de trituración.
38. El procedimiento de la reivindicación 37, en el que el conjunto de placa troceadora (118) del mecanismo de trituración realiza una serie de rotaciones hacia delante y hacia atrás.
39. El procedimiento de la reivindicación 28, en el que la segunda velocidad rotacional es menor que o mayor que la primera velocidad rotacional.
40. El procedimiento de la reivindicación 39, en el que la primera velocidad rotacional se encuentra entre 2500 y 4000 rotaciones por minuto.
41. El procedimiento de la reivindicación 39 ó 40, en el que la segunda velocidad rotacional es inferior a 2500 rotaciones por minuto.
42. El procedimiento de cualquiera de las reivindicaciones 28 a 41, que comprende además la rotación del conjunto de placa troceadora (118) del mecanismo de trituración a una tercera velocidad rotacional para un tercer periodo de tiempo.
43. El procedimiento de la reivindicación 42, en el que la primera velocidad rotacional es mayor que la segunda velocidad rotacional, y la segunda velocidad rotacional es mayor que la tercera velocidad rotacional, o la primera velocidad rotacional es menor que la segunda velocidad rotacional, y la segunda velocidad rotacional es mayor que la tercera velocidad rotacional.
44. El procedimiento de las reivindicaciones 42 ó 43, en el que la tercera velocidad rotacional se encuentra entre 300 y 1500 rotaciones por minuto.
45. El procedimiento de cualquiera de las reivindicaciones 28, 30 y 31, que comprende:
determinar automáticamente la presencia de residuos de alimentos en el dispositivo de disgregación de residuos de alimentos (100); y cambiar de forma controlable la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración dependiendo de la presencia de residuos de alimentos en el dispositivo de disgregación de residuos de alimentos (100).
46. El procedimiento de la reivindicación 45, en el que la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración aumenta si hay residuos de alimentos en el dispositivo de disgregación de residuos de alimentos (100).
47. El procedimiento de la reivindicación 46, en el que la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración aumenta desde la primera velocidad rotacional a la segunda velocidad rotacional.
48. El procedimiento de la reivindicación 47, en el que la primera velocidad rotacional se encuentra entre 400 y 800 rotaciones por minuto.
49. El procedimiento de cualquiera de las reivindicaciones 46 a 48, en el que la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo triturador disminuye subsiguientemente desde la segunda velocidad rotacional a la primera velocidad rotacional si hay residuos de alimentos en el dispositivo de disgregación de residuos de alimentos (100).
50. El procedimiento de cualquiera de las reivindicaciones 46 a 49, en el que la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración disminuye si no hay residuos de alimentos en el dispositivo de disgregación de residuos de alimentos (100).
51. El procedimiento de cualquiera de las reivindicaciones 45 a 50, en el que la presencia de residuos de alimentos en el dispositivo de disgregación de residuos de alimentos (100) está determinada por el controlador de motor (220).
52. El procedimiento de la reivindicación 51, en el que el motor comprende además un estator (182) y en el que el controlador (220) está en comunicación eléctrica con el estator (182).
53. El procedimiento de la reivindicación 52, en el que la determinación de presencia de residuos de alimentos en el dispositivo de disgregación de residuos de alimentos (100) comprende el uso del controlador (220) para controlar la corriente del estator (182).
54. El procedimiento de la reivindicación 53, en el que la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración disminuye en respuesta a la disminución en la corriente del estator.
55. El procedimiento de la reivindicación 54, en el que la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración aumenta en respuesta al aumento de la corriente del estator.
56. El procedimiento de cualquiera de las reivindicaciones 28, 30 a 32, 33 a 38 y 45 a 50, que comprende secuencialmente la retirada de alimentos procesados del dispositivo de disgregación de residuos de alimentos (100); y después de retirar los alimentos procesados del dispositivo de disgregación de residuos de alimentos (100), el suministro de agua al mecanismo de trituración mientras se cambia de forma controlable una velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración.
57. El procedimiento de la reivindicación 56, en el que el procedimiento de la reivindicación 67 se realiza después de que el dispositivo de disgregación de residuos de alimentos (100) ejecuta en modo de marcha lenta.
58. El procedimiento de la reivindicación 57, en el que el dispositivo de disgregación de residuos de alimentos (100) está en modo de marcha lenta durante un determinado periodo de tiempo antes de realizar el procedimiento de la reivindicación 67.
59. El procedimiento de cualquiera de las reivindicaciones 56 a 58, en el que la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración aumenta de forma controlable cuando se proporciona agua al mecanismo de trituración.
60. El procedimiento de la reivindicación 59, en el que la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración aumenta de forma controlable desde la primera velocidad rotacional a la segunda velocidad rotacional.
61. El procedimiento de la reivindicación 60, en el que la primera velocidad rotacional se encuentra entre 400 y 800 rotaciones por minuto.
62. El procedimiento de las reivindicaciones 60 ó 61, en el que la segunda velocidad rotacional es superior a 1500 rotaciones por minuto.
63. El procedimiento de cualquiera de las reivindicaciones 56 a 62, en el que el dispositivo de disgregación de residuos de alimentos (100) comprende además una sección de transporte de alimentos (102) y una entrada de agua separada de la sección de transporte de alimentos (102) y en el que se proporciona agua al mecanismo de trituración a través de la entrada de agua.
64. El procedimiento de cualquiera de las reivindicaciones 56 a 63, en el que el controlador del motor (220) está en comunicación eléctrica con una válvula (230) y en el que el controlador (220) proporciona agua al mecanismo a través de la entrada de agua abriendo la válvula (230).
65. El procedimiento de cualquiera de las reivindicaciones 56 a 64, en el que el procedimiento de la reivindicación 67 se realiza antes de apagar el dispositivo de disgregación de residuos de alimentos (100).
66. El procedimiento de cualquiera de las reivindicaciones 28, 30 a 32, 33 a 38, 39 a 44, 45-50, 51 a 55 y 56 a 65 que comprende el aumento de forma controlable de la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración a una tasa rotacional predeterminada durante un periodo de tiempo predeterminado.
67. El procedimiento de la reivindicación 66, en el que la tasa rotacional predeterminada es superior a 1500 rotaciones por minuto.
68. El procedimiento de las reivindicaciones 66 ó 67 en el que el periodo de tiempo predeterminado es superior a 3 segundos.
69. El procedimiento de cualquiera de las reivindicaciones 66 a 68, en el que la velocidad rotacional del conjunto de placa troceadora (118) del mecanismo de trituración aumenta de forma controlable desde una posición estática.
70. El procedimiento de cualquiera de las reivindicaciones 28, 30 a 32, 33 a 38, 39 a 44, 45-50, 51 a 55 y 56 a 69, en el que un motor (180) es un motor de velocidad variable.
71. El procedimiento de la reivindicación 70, en el que el motor (18) es un motor de reluctancia conmutada, o un motor de imán permanente.
72. El procedimiento de cualquiera de las reivindicaciones 28, 30 a 32, 33 a 38, 39 a 44, 45-50, 51 a 55 y 56 a 71, en el que el conjunto de placa troceadora (182) del mecanismo triturador incluye patillas troceadoras (142).
73. El procedimiento de cualquiera de las reivindicaciones 28, 30 a 32, 33 a 38, 38 a 44, 45-50, 51 a 55 y 56 a 72, en el que el motor (18) está posicionado en una sección de alojamiento de motor (106) y en el que el mecanismo de trituración está posicionado en una sección de trituración (104), y en el que la sección de alojamiento de motor (106) y la sección de trituración (104) son adyacentes.
74. El procedimiento de la reivindicación 73, en el que la sección de trituración (104) comprende además un anillo troceador estático (120).
75. El procedimiento de las reivindicaciones 73 ó 74, que comprende además una sección de transporte de alimentos (102) adyacente a la sección de trituración (104) para recibir residuos de alimentos.
Patentes similares o relacionadas:
Dispositivo de trituración para triturar material de triturado, del 13 de Noviembre de 2019, de LIG GmbH: Instalación de trituración para triturar material de triturado, especialmente para su uso en el campo del reciclaje y del procesamiento de residuos, […]
Sistema triturador de desechos alimenticios, del 9 de Octubre de 2019, de EMERSON ELECTRIC CO.: Un sistema triturador de desechos alimenticios, que comprende: un triturador de desechos alimenticios que incluye una sección de transporte […]
Dispositivo de trituración de desechos estacionario con acumulador de energía, del 6 de Febrero de 2019, de LINDNER, MANUEL: Dispositivo de trituración de desechos estacionario que comprende: al menos un árbol de trituración , al menos un electromotor […]
Disposición para el funcionamiento de una trituradora, del 28 de Marzo de 2018, de BMH TECHNOLOGY OY: 1. Disposición para el funcionamiento de una trituradora que tritura material a granel, que comprende un motor eléctrico para el accionamiento de al menos […]
Dispositivo para la reducción de productos fibrosos, del 14 de Febrero de 2018, de VERNACARE LIMITED: Un macerador que comprende una carcasa , una abertura en la carcasa que proporciona acceso a su interior, un cierre que puede asegurarse para cerrar, de forma […]
Procesador de alimentos portátil, del 12 de Julio de 2017, de WONG, YAN KWONG: Procesador de alimentos portátil que comprende: un contenedor (100') adaptado para recibir alimentos, donde un elemento de procesamiento […]
Dispositivo para triturar virutas metálicas, del 14 de Junio de 2017, de Kilian, Karl-Heinz: Dispositivo para triturar virutas metálicas - con al menos un eje de cuchillas alojado de forma giratoria, en el que están sujetos de […]
Trituradora con eje de cuchillas de cambio rápido, del 1 de Febrero de 2017, de Wolf, Jürgen: Trituradora para partir mercancia a granel compuesta por: - un recipiente tipo embudo , cuya base presenta - una apertura de salida , […]