PROCEDIMIENTO DE CONTROL DE FILTROS ADICIONALES EN UN SISTEMA DE NAVEGACION POR SATELITE.
Procedimiento de control de filtros adicionales (A, B, C, D, E) en un sistema de navegación y de localización por satélite (10) que equipa un vehículo (1) y que facilita,
durante un recorrido del vehículo, por lo menos, una posición del vehículo utilizando un filtro principal (P) de fusión de datos que procede de una constelación visible de satélites que pertenecen a un sistema de localización por satélite (2, 4, 5, 6) presentes por encima del horizonte del vehículo, excluyendo cada uno de dichos filtros adicionales los datos procedentes de uno de los satélites para obtener una posición corregida en caso de fallo del satélite excluido, caracterizado porque el procedimiento comprende las siguientes etapas:
- determinar, a partir de una posición del vehículo, una constelación teórica de satélites que pertenecen al sistema de localización por satélites (2, 3, 4, 5, 6) presentes por encima del horizonte,
- para cualquier satélite presente en la constelación teórica, crear y mantener un filtro adicional que excluye este satélite
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2007/000456.
Solicitante: SAGEM DEFENSE SECURITE.
Nacionalidad solicitante: Francia.
Dirección: LE PONANT DE PARIS 27, RUE LEBLANC,75015 PARIS.
Inventor/es: VACHER,CHARLIE, GOUDON,JEAN-CLAUDE.
Fecha de Publicación: .
Fecha Concesión Europea: 24 de Febrero de 2010.
Clasificación Internacional de Patentes:
- G01S1/00S2C2
Clasificación PCT:
- G01S5/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Fragmento de la descripción:
Procedimiento de control de filtros adicionales en un sistema de navegación por satélite.
La presente invención se refiere a un procedimiento de control de filtros adicionales en un sistema de navegación y de localización por satélite, tal como un sistema GPS ("Global Positioning System") que equipa un vehículo, y en especial una aeronave.
Antecedentes de la invención
Un sistema de navegación de este tipo permite calcular, durante el recorrido de la aeronave, posiciones sucesivas de la misma utilizando un filtro principal de fusión de datos que procede de una constelación visible de satélites presentes por encima de un horizonte de la aeronave y eventualmente de datos procedentes de una central inercial o similar embarcada en la aeronave. Se recordará que el horizonte es la línea que separa lo que, desde el punto de vista de la aeronave, está ocultado por la curvatura de la Tierra con respecto a aquéllo que no lo está. Con el sistema GPS, un cierto número máximo de satélites se encuentran presentes por encima del horizonte de una aeronave (es decir, el número máximo de satélites no ocultados por la curvatura de la Tierra con relación a la aeronave) del orden de diez, pero no es raro que el relieve o una parte de la aeronave oculten uno o varios de estos satélites. Este sistema de navegación funciona, no obstante, a partir del momento en el que se dispone de datos, como mínimo, cuatro de los satélites que forman la constelación visible de los satélites. Este sistema de navegación se muestra relativamente preciso cuando los satélites funcionan correctamente, pero el rendimiento de éste se degrada rápidamente desde el momento en que uno de los satélites presenta un fallo que afecta la validez de los datos transmitidos.
Para solucionar este problema, el sistema de navegación calcula igualmente las posiciones corregidas a partir de filtros adicionales excluyendo cada un los datos que proceden de uno de los satélites. Cuando se ha detectado el fallo de uno de los satélites, el filtro adicional que excluye este satélite pasa a ser el filtro principal y los otros filtros adicionales son inicializados a partir del nuevo filtro principal.
Este sistema es descrito en el documento US-A-5 760 737.
La creación de los filtros adicionales es puesta en marcha por la detección de un nuevo satélite. De este modo, desde que los datos procedentes de un satélite llegan al sistema de navegación, es creado un filtro adicional que excluye este satélite y este satélite es incorporado a los filtros adicionales existentes. Cuando el sistema de navegación ya no detecta datos procedentes de este satélite, el filtro adicional correspondiente es borrado. No obstante, cuando los satélites son ocultados por el relieve o por una parte de la aeronave., los datos transmitidos por los satélites ocultados no llegan al sistema de navegación, lo que provoca el borrado de los filtros correspondientes, filtros que serán creados nuevamente cuando los satélites no estén ocultos y que sus datos llegarán al sistema de navegación. El control de los filtros adicionales es particularmente difícil de gestionar y constituye una carga de cálculo relativamente importante para el sistema de navegación.
Objeto de la invención
Por lo tanto, sería de interés el disponer de un medio que permita aligerar la gestión de los filtros adicionales.
Resumen de la invención
A estos efectos, se prevé, según la invención, un procedimiento de control de los filtros adicionales en un sistema de navegación que equipa un vehículo y que facilita, en el desplazamiento del vehículo, como mínimo, una posición del vehículo utilizando un filtro principal de fusión de datos procedentes de una constelación visible de satélites presente por encima de un horizonte del vehículo, excluyendo cada uno de los filtros adicionales los datos procedentes de uno de los satélites para obtener una posición corregida en caso de fallo del satélite que se ha excluido. El procedimiento comprende las siguientes etapas:
- determinar, a partir de una posición del vehículo, una constelación teórica de satélites presentes por encima del horizonte,
- para cualquier satélite presente en la constelación teórica, crear y mantener un filtro adicional que excluya este satélite.
De este modo, los filtros adicionales son mantenidos mientras que los satélites excluidos por éstos se encuentran presentes en la constelación teórica, tanto si estos satélites son visibles como si están ocultos. Dado que la constelación teórica sufre relativamente pocas modificaciones en el curso del recorrido del vehículo, existen relativamente pocas creaciones y borrados de filtros adicionales.
Preferentemente, el procedimiento comprende la etapa, para cualquier satélite presente en la constelación teórica, de incluir este satélite en los filtros adicionales existentes desde la aparición de este satélite en la constelación teórica.
De este modo, un satélite que aparece en la constelación teórica es incorporado en los filtros adicionales existentes sin esperar la detección de este satélite por el filtro principal. Esta incorporación puede ser realizada, por lo tanto, repartiendo la carga de cálculo.
De manera ventajosa, la posición utilizada para la determinación de la constelación teórica es facilitada por el filtro principal.
La constelación teórica determinada corresponde entonces de forma precisa a la posición del vehículo en el curso del recorrido de éste y ello incluso si el destino o los puntos de paso del vehículo han sido modificados en el curso del recorrido.
También de modo preferente, cuando un satélite desaparece de la constelación teórica en un momento determinado del recorrido, el procedimiento comprende la etapa de esperar una duración predeterminada antes de suprimir el filtro adicional que excluye este satélite.
Esto es ventajoso en caso de desaparición temporal de un satélite de la constelación teórica.
De modo ventajoso, cuando un satélite desaparecido vuelve a aparecer en la constelación teórica, el procedimiento comprende la etapa de esperar una convergencia de los filtros antes de crear un filtro adicional que excluya este satélite y reincorporar este satélite en los filtros adicionales existentes.
Esto permite evitar que un satélite que presenta un fallo no detectado en el momento de su desaparición de la constelación sea reintegrado en los filtros adicionales y que no falsee las posiciones corregidas. Otras características y ventajas de la invención resultarán de la lectura de la descripción de una forma de realización específica no limitativa de la invención.
Breve descripción de los dibujos
Se hará referencia a los dibujos adjuntos entre los cuales:
- la figura 1 es una vista esquemática en perspectiva de una constelación de satélites presentes por encima del horizonte de una aeronave,
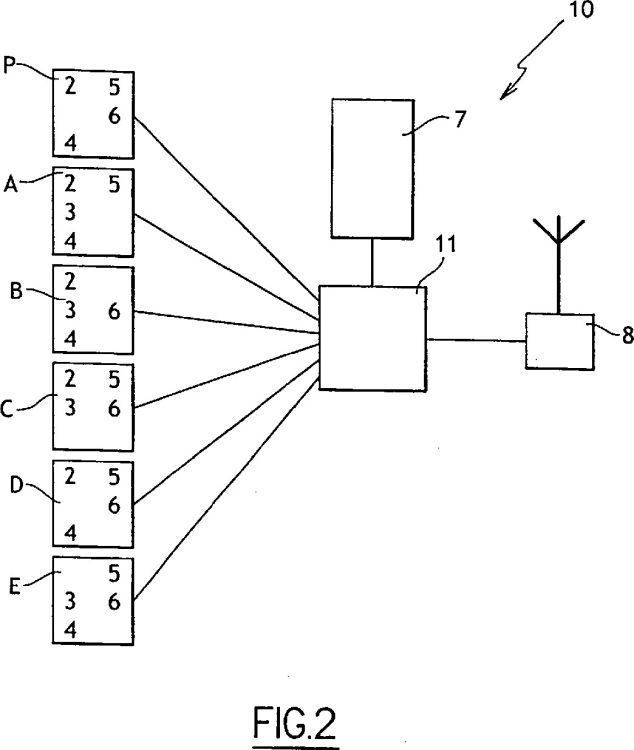
- la figura 2 es una vista esquemática de un sistema de navegación embarcado en la aeronave.
Descripción detallada de la invención
Haciendo referencia a las figuras, el procedimiento de la invención se describe en relación con una aeronave (1) en la que está embarcado un sistema de navegación (10) que utiliza datos procedentes de los satélites (2, 3, 4, 5 y 6) en órbita alrededor de la Tierra (100) y datos procedentes de una central inercial (7) embarcada en la aeronave (1).
La central inercial (7) es de tipo conocido y facilita, a partir de captadores fijos en la aeronave (1), datos relativos en especial al centrado de la aeronave (1), su velocidad.
Los satélites (2, 3, 4, 5, 6) forman parte de un conjunto de satélites posicionados en órbita alrededor de la Tierra y que pertenecen a un sistema de localización por satélites de tipo GPS. Cada uno de los satélites (2, 3, 4, 5, 6) emite permanentemente una señal que comporta su localización y la hora precisa de emisión de la señal. Es evidente que la invención es igualmente utilizable con otros sistemas de localización por satélite, tales como el sistema GALILEO cuando éste se encuentre en funcionamiento.
El sistema de navegación (10) comprende una unidad de cálculo (11) conectada a la central inercial (7) y a un receptor (8) de las señales procedentes de los satélites. La unidad de cálculo (11) incorpora de manera conocida en sí misma unos procesadores y memorias que le permiten calcular una pseudo-distancia que separa la aeronave (1) de cada satélite,...
Reivindicaciones:
1. Procedimiento de control de filtros adicionales (A, B, C, D, E) en un sistema de navegación y de localización por satélite (10) que equipa un vehículo (1) y que facilita, durante un recorrido del vehículo, por lo menos, una posición del vehículo utilizando un filtro principal (P) de fusión de datos que procede de una constelación visible de satélites que pertenecen a un sistema de localización por satélite (2, 4, 5, 6) presentes por encima del horizonte del vehículo, excluyendo cada uno de dichos filtros adicionales los datos procedentes de uno de los satélites para obtener una posición corregida en caso de fallo del satélite excluido, caracterizado porque el procedimiento comprende las siguientes etapas:
- determinar, a partir de una posición del vehículo, una constelación teórica de satélites que pertenecen al sistema de localización por satélites (2, 3, 4, 5, 6) presentes por encima del horizonte,
- para cualquier satélite presente en la constelación teórica, crear y mantener un filtro adicional que excluye este satélite.
2. Procedimiento, según la reivindicación 1, que comprende la etapa, para cualquier satélite presente en la constelación teórica (2, 3, 4, 5, 6), de incluir este satélite en los filtros adicionales (A, B, C, D, E) existentes desde la aparición de dicho satélite en la constelación teórica.
3. Procedimiento, según la reivindicación 1, en el que la posición utilizada para la determinación de la constelación teórica (2, 3, 4, 5, 6) es facilitada por el filtro principal (P).
4. Procedimiento, según la reivindicación 1, en el que cuando un satélite desaparece de la constelación teórica (2, 3, 4, 5, 6) en un instante del recorrido, el proceso comprende la etapa de esperar un tiempo predeterminado antes de suprimir el filtro adicional (A, B, C, D, E) que excluye este satélite.
5. Procedimiento, según la reivindicación 4, en el que, cuando un satélite desaparecido reaparece en la constelación teórica (2, 3, 4, 5, 6), el procedimiento comprende la etapa de esperar una convergencia de los filtros (A, B, C, D, E) antes de crear un filtro adicional (A, B, C, D, E) que excluya este satélite y reincorporar este satélite en los filtros adicionales existentes.
Patentes similares o relacionadas:
Sistema de posicionamiento para satélite artificial geoestacionario, del 18 de Marzo de 2020, de Sky Perfect JSAT Corporation: Sistema de medición de posición para un satélite artificial geoestacionario , comprendiendo el sistema: dos o más antenas, que incluyen, como […]
Ubicación de la posición para sistemas de comunicación inalámbrica, del 11 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento, que comprende: recibir una señal piloto de ubicación de la posición desde una estación base en una estación móvil , la señal piloto de ubicación […]
Formato de trama de difusión de tiempo de salida (TOD), del 4 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento de medición de alcance entre una o más estaciones inalámbricas, STA, y un primer punto de acceso, AP, el procedimiento que comprende: […]
SISTEMA DE AJUSTE FINO PARA LOCALIZACIÓN Y DEFINICIÓN DE OBJETOS MEDIANTE UNA DISPOSICIÓN DE ANTENAS RFID, del 12 de Febrero de 2020, de GUTIÉRREZ GONZÁLEZ, Noel: 1. Sistema de ajuste fino para la localización y definición de objetos mediante una disposición de antenas RFID, y donde dichos objetos pueden estar parados o […]
Sistema y método para proporcionar servicios basados en ubicación a bordo de una aeronave, del 13 de Noviembre de 2019, de THE BOEING COMPANY: Sistema para proporcionar servicios basados en ubicación a bordo de una aeronave para usuarios que tienen dispositivos […]
 Ubicación de la posición para sistemas de comunicación inalámbrica, del 18 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende:
establecer una sesión de recepción y/o de transmisión discontinuas entre una estación móvil y una célula de servicio de […]
Ubicación de la posición para sistemas de comunicación inalámbrica, del 18 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende:
establecer una sesión de recepción y/o de transmisión discontinuas entre una estación móvil y una célula de servicio de […]
 Supervisión y/o establecimiento de protocolos de una posición de una herramienta en una caja de ascensor, del 28 de Agosto de 2019, de INVENTIO AG: Sistema para la supervisión y/o creación de protocolo de una posición de una herramienta en una caja de ascensor , comprendiendo el sistema: […]
Supervisión y/o establecimiento de protocolos de una posición de una herramienta en una caja de ascensor, del 28 de Agosto de 2019, de INVENTIO AG: Sistema para la supervisión y/o creación de protocolo de una posición de una herramienta en una caja de ascensor , comprendiendo el sistema: […]
Medición de temporización fina segura, del 14 de Agosto de 2019, de QUALCOMM INCORPORATED: Un aparato para proporcionar un intercambio de medición de temporización fina, FTM, segura que comprende: medios para obtener un valor de token seguro inicial y […]