APARATO DE MECANIZACION ORBITAL CON ELEMENTO DE ARRASTRE CON CLAVIJAS DE ARRASTRE.
Un aparato de mecanización orbital para practicar un agujero en una pieza a trabajar por medio de una herramienta de corte,
comprendiendo dicho aparato:
un primer actuador (12) configurado para hacer rotar la herramienta (14) de corte sobre su eje central (16) longitudinal durante la mecanización del agujero;
un segundo actuador (21) configurado para mover la herramienta (14) de corte en una dirección de avance axial sustancialmente paralela a dicho eje (16) de la herramienta, siendo dicho segundo actuador (21) simultáneamente operable con dicho primer actuador (12);
un tercer actuador (20) configurado para hacer rotar la herramienta (14) de corte sobre un eje principal, siendo dicho eje principal sustancialmente paralelo a dicho eje central (16) de la herramienta (14) y coaxial con un eje central longitudinal del agujero a ser mecanizado, siendo dicho tercer actuador (20) simultáneamente operable con dichos primer y segundo actuadores (12, 21); y
un mecanismo (18) de decalaje radial configurado para controlar la distancia radial del eje central (16) de la herramienta (14) de corte hasta dicho eje principal, comprendiendo dicho mecanismo (18) de decalaje radial:
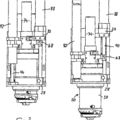
un cuerpo cilíndrico (24) interior que tiene un agujero cilíndrico (26) excéntrico, teniendo dicho agujero excéntrico un eje central longitudinal que es paralelo, y está radialmente decalado, con respecto a un eje central longitudinal de dicho cuerpo interior, estando configurado dicho agujero excéntrico (26) para soportar radial y rotatoriamente una unidad (12) de husillo para accionar dicha herramienta (14) de corte; y
un cuerpo cilíndrico (36) exterior que tiene un agujero cilíndrico (34) excéntrico, teniendo dicho agujero de dicho cuerpo exterior (36) un eje central longitudinal que es paralelo, y está radialmente decalado, con respecto a un eje central longitudinal de dicho cuerpo exterior (36), siendo dicho cuerpo cilíndrico interior (24) soportado radialmente por dicho agujero excéntrico (34) del cuerpo cilíndrico (36) exterior y siendo rotativo con respecto al mismo para permitir el ajuste de la distancia radial entre dicho eje central (16) de la herramienta (14) de corte y dicho eje principal,
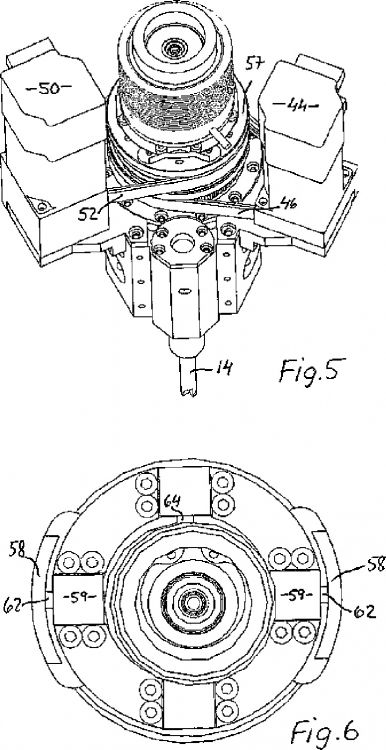
incluyendo dicho tercer actuador (20) un primer motor (44) que está conectado de forma motriz al cuerpo cilíndrico (36) exterior para hacerle hacer rotar individualmente sobre el eje central longitudinal del mismo, y un segundo motor (50) que está conectado de forma motriz al cuerpo cilíndrico (24) interior para hacerle hacer rotar individualmente sobre el eje central longitudinal del mismo, estando configurados dichos primer y segundo motores (44, 50) para hacer rotar en sincronismo los cuerpos cilíndricos (36, 24) exterior e interior para mantener una posición rotatoria mutua de los mismos para conservar la misma posición de decalaje radial de la herramienta (14) de corte durante una maniobra, y estando configurados adicionalmente el primer y segundo motores (44, 50) para hacer rotar los cuerpos cilíndricos (36, 24) exterior e interior el uno con respecto al otro para variar la posición de decalaje radial de la herramienta (14) de corte,
incluyendo adicionalmente dicho tercer actuador (20) un primer elemento (48) de arrastre rotativo coaxial con el cuerpo cilíndrico (36) exterior y accionado por el primer motor (44), y un segundo elemento (57) de arrastre rotativo coaxial con el cuerpo cilíndrico (36) exterior y rotado por el segundo motor (50), caracterizado porque el segundo elemento (57) de arrastre está conectado de manera rotatoria a un anillo portador (60) mediante dos clavijas (62) de arrastre radiales, diametralmente opuestas, de manera que el anillo portador (60) pueda efectuar un movimiento de deslizamiento radial, a lo largo del eje longitudinal de las clavijas de arrastre (62) con respecto al segundo elemento (57) de arrastre a la vez que es rotado por el mismo, estando conectado el anillo portador (60) al cuerpo cilíndrico interior (24) mediante dos vástagos portadores (64) de guiado radial, diametralmente opuestos, que están separados circunferencialmente 90° de las clavijas (62) de arrastre, de forma que el cuerpo cilíndrico (24) interior puede llevar a cabo un movimiento deslizante radial con respecto al anillo portador (60) a la vez que es rotado por el mismo
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2004/001036.
Solicitante: NOVATOR AB.
Nacionalidad solicitante: Suecia.
Dirección: STORMBYVAGEN 6,163 55 SPAANGA.
Inventor/es: PETTERSSON,BJORN, STUXBERG,MATS.
Fecha de Publicación: .
Fecha Concesión Europea: 13 de Enero de 2010.
Clasificación Internacional de Patentes:
- B23Q1/48G3
- B23Q1/54C
Clasificación PCT:
- B23C1/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23C FRESADO (brochado B23D; para la fabricación de engranajes B23F; dispositivos para copiar o controlar B23Q). › Máquinas de fresado no concebidas para piezas particulares u operaciones especiales.
Clasificación antigua:
- B23C41/04
Fragmento de la descripción:
Aparato de mecanización orbital con elemento de arrastre con clavijas de arrastre.
Antecedentes de la invención
La presente invención se refiere generalmente a un aparato de mecanización orbital para practicar un agujero en una pieza a trabajar por medio de una herramienta de corte que gira sobre su propio eje así como excéntricamente (orbitando) sobre un eje principal que corresponde al eje central longitudinal del agujero a mecanizar. Más particularmente, la invención se refiere a un mecanismo mejorado de dicho aparato para transferir un movimiento rotacional a un cuerpo cilíndrico excéntrico interior de un mecanismo para ajustar el decalaje radial (radio de la órbita) del eje de la herramienta de corte con respecto al eje principal.
El documento WO/03/008136 A1 describe un aparato de mecanización orbital para practicar un agujero en una pieza a trabajar por medio de una herramienta de corte, comprendiendo dicho aparato:
un mecanismo de decalaje radial configurado para controlar la distancia radial desde el eje central de la herramienta de corte hasta dicho eje principal, comprendiendo dicho mecanismo de decalaje radial:
El primer y segundo motores también están configurados para hacer hacer rotar los cuerpos cilíndricos exterior e interior a diferentes velocidades angulares para variar la posición de decalaje radial de la herramienta de corte. Por lo tanto, durante una maniobra, dos motores independientes y sus transmisiones están configurados para hacer rotar los cuerpos cilíndricos exterior e interior en sincronismo (= sin rotación mutua) para mantener una posición rotatoria mutua predeterminada de los cuerpos cilíndricos y por lo tanto una decalaje radial predeterminada (para hacer un agujero o rebaje cilíndricos en una pieza a trabajar), o a diferentes velocidades angulares (rotación mutua) para variar el decalaje radial ya sea durante una maniobra (p.ej. para hacer un agujero o rebaje cónicos) o durante una fase de parada para ajustar el decalaje radial a otro valor de decalaje radial deseado.
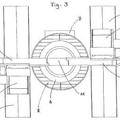
La transmisión o mecanismo para transferir un movimiento rotacional desde el segundo motor al cuerpo cilíndrico interior incluye un acoplamiento, que esta configurado para permitir que el cuerpo cilíndrico interior lleve a cabo un movimiento sobre el eje principal al tiempo que no rota sobre su propio eje central con respecto al cuerpo cilíndrico exterior. El acoplamiento también permite que el segundo motor haga rotar el cuerpo cilíndrico interior sobre su eje central con respecto al cuerpo cilíndrico exterior para variar el decalaje radial durante una maniobra o durante una fase de parada para ajustar el decalaje radial a otro valor de decalaje radial deseado. Éste acoplamiento comprende un mecanismo de horquilla y rodillo de leva. Un problema relacionado con el mecanismo de horquilla y rodillo de leva es que la superficie de contacto del rodillo de leva se desgasta con el tiempo y crea un huelgo que afecta al grado de precisión del mecanismo de acoplamiento y por lo tanto al proceso de trabajo del aparato de mecanización orbital.
Resumen de la invención
Un objetivo de la presente invención es proporcionar un aparato de mecanización orbital que tenga una disposición de acoplamiento que elimine los inconvenientes mencionados anteriormente de las máquinas previas. Con éste propósito el aparato comprende:
Reivindicaciones:
1. Un aparato de mecanización orbital para practicar un agujero en una pieza a trabajar por medio de una herramienta de corte, comprendiendo dicho aparato:
incluyendo adicionalmente dicho tercer actuador (20) un primer elemento (48) de arrastre rotativo coaxial con el cuerpo cilíndrico (36) exterior y accionado por el primer motor (44), y un segundo elemento (57) de arrastre rotativo coaxial con el cuerpo cilíndrico (36) exterior y rotado por el segundo motor (50), caracterizado porque el segundo elemento (57) de arrastre está conectado de manera rotatoria a un anillo portador (60) mediante dos clavijas (62) de arrastre radiales, diametralmente opuestas, de manera que el anillo portador (60) pueda efectuar un movimiento de deslizamiento radial, a lo largo del eje longitudinal de las clavijas de arrastre (62) con respecto al segundo elemento (57) de arrastre a la vez que es rotado por el mismo, estando conectado el anillo portador (60) al cuerpo cilíndrico interior (24) mediante dos vástagos portadores (64) de guiado radial, diametralmente opuestos, que están separados circunferencialmente 90° de las clavijas (62) de arrastre, de forma que el cuerpo cilíndrico (24) interior puede llevar a cabo un movimiento deslizante radial con respecto al anillo portador (60) a la vez que es rotado por el mismo.
2. El aparato de la reivindicación 1, en el cual dicho segundo elemento (57) de arrastre está conectado coaxialmente a una polea (54) para correa que es rotada por el segundo motor (50) a través de una correa (52) sin fin.
3. El aparato de las reivindicaciones 1 ó 2, en el cual el segundo elemento (57) de arrastre constituye un yugo que tiene dos orejetas (58), diametralmente opuestas, que se extienden axialmente y que soportan a modo de guía el anillo portador (60) por medio dichas clavijas (62) de arrastre.
Patentes similares o relacionadas:
DISPOSITIVO DE MECANIZACIÓN DE RANURAS EN UN ÁNIMA CILÍNDRICA, EN PARTICULAR DE UN CILINDRO MAESTRO DE FRENO, del 21 de Noviembre de 2011, de ROBERT BOSCH GMBH: Dispositivo de mecanización de ranuras en un ánima cilíndrica que desemboca en el extremo de una pieza , caracterizado porque comprende: - un útil cilíndrico […]
 APARATO CON HERRAMIENTA ORBITAL MANUAL PARA TALADRAR, del 16 de Noviembre de 2009, de NOVATOR AB: Un aparato con una herramienta manual para utilizar la herramienta de corte con una primera anchura y un eje de la herramienta para mecanizar un agujero en un objeto, […]
APARATO CON HERRAMIENTA ORBITAL MANUAL PARA TALADRAR, del 16 de Noviembre de 2009, de NOVATOR AB: Un aparato con una herramienta manual para utilizar la herramienta de corte con una primera anchura y un eje de la herramienta para mecanizar un agujero en un objeto, […]
Método para el diseño de condiciones de corte para el corte, del 4 de Julio de 2018, de KABUSHIKI KAISHA KOBE SEIKO SHO (KOBE STEEL, LTD.): Un método para el diseño de condiciones de corte que diseña las condiciones de corte requeridas para cortar una pieza de trabajo con una herramienta de […]
Procedimiento para fabricar una pieza conformada de carrocería, del 13 de Julio de 2016, de MN Coil Servicecenter GmbH: Procedimiento para fabricar una pieza conformada de carrocería, en el que a partir de un segmento de chapa fina se corta al menos una pieza de recorte en bruto, que […]
Máquina herramienta de control numérico, del 18 de Mayo de 2016, de PARPAS S.P.A.: Máquina herramienta de control numérico incluyendo un basamento y un elemento transversal de soporte principal sustancialmente rectilíneo […]
 Fresadora doble con puente de trabajo central, del 7 de Noviembre de 2013, de SHW WERKZEUGMASCHINEN GMBH: Fresadora doble para el mecanizado de piezas de trabajo compuesta por dos fresadoras que trabajan y secontrolan en forma independiente, […]
Fresadora doble con puente de trabajo central, del 7 de Noviembre de 2013, de SHW WERKZEUGMASCHINEN GMBH: Fresadora doble para el mecanizado de piezas de trabajo compuesta por dos fresadoras que trabajan y secontrolan en forma independiente, […]
Herramienta de corte rotatoria, del 13 de Junio de 2012, de SGS TOOL COMPANY (100.0%): Una herramienta de corte rotatoria que comprende: un cuerpo que tiene una parte cortante y una parte de fuste ; una pluralidad de […]
NUEVO METODO DE COMPENSACION DE ERROR PARA ERRORES ANGULARES EN EL MECANIZADO (COMPENSACION DE INCLINACION)., del 1 de Julio de 2004, de UNOVA IP CORP.: Sistema de compensación de error para máquina herramienta, que comprende: un plato , sobre el cual se monta una máquina herramienta , unos medios de guía […]