APARATO DE CONTROL-REHABILITACION DE PIERNA, PIE Y ARTICULACION TIBIO-PERONEO-ASTRAGALINO.
La invención consiste en un aparato formado por un chasis fijo (2) y un chasis móvil (1) acoplados telescópicamente,
sobre los que se fija la pierna y el muslo mediante las correspondientes férulas (3) y (4), para que el pie dispuesto sobre un pedal (10), puedan realizar tanto la flexión dorsal, como la plantar, venciendo la resistencia de sendos muelles (13) o (9)
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200600756.
Solicitante: BENEITEZ BALLESTA,CARLOS.
Nacionalidad solicitante: España.
Provincia: ZAMORA.
Inventor/es: BENEITEZ BALLESTA,CARLOS.
Fecha de Solicitud: 16 de Marzo de 2006.
Fecha de Publicación: .
Fecha de Concesión: 11 de Mayo de 2010.
Clasificación Internacional de Patentes:
- A61H1/02 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61H APARATOS DE FISIOTERAPIA, p. ej. DISPOSITIVOS PARA LOCALIZAR O ESTIMULAR LOS PUNTOS EN DONDE SE LOCALIZAN LOS CUERPOS; RESPIRACION ARTIFICIAL; MASAJE; DISPOSITIVOS DE BAÑO PARA USOS TERAPEUTICOS O HIGIENICOS PARTICULARES O PARA PARTES DETERMINADAS DEL CUERPO (electroterapia, magnetoterapia, radioterapia, terapia por ultrasonidos A61N). › A61H 1/00 Aparatos para el ejercicio pasivo (A61H 5/00 tiene prioridad ); Aparatos vibradores; Dispositivos quiroprácticos, p. ej. dispositivos para aplicar impactos al cuerpo, dispositivos externos para estirar o alinear de forma ligera los huesos no fracturados . › Aparatos para ejercicios de extensión o flexión.
- A63B23/04C
Clasificación PCT:
- A61H1/02 A61H 1/00 […] › Aparatos para ejercicios de extensión o flexión.
- A63B23/04 A […] › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63B MATERIAL PARA LA EDUCACION FISICA, GIMNASIA, NATACION, ESCALADA O ESGRIMA; JUEGOS DE PELOTA; MATERIAL DE ENTRENAMIENTO (aparatos para gimnasia pasiva, masaje A61H). › A63B 23/00 Aparatos de ejercicio especialmente adaptados a partes determinadas del cuerpo (A63B 22/00 tiene prioridad; aspectos de resistencia A63B 21/00; controles eléctricos o electrónicos de los mismos A63B 24/00; dispositivos para ejercitar o fortificar los dedos o los brazos para la enseñanza de la manipulación de teclados G09B, p. ej. G09B 15/06). › para los miembros inferiores.
Descripción:
Aparato de control-rehabilitación de pierna, pie y articulación Tibio-Peroneo-Astragalino.
La presente invención tiene por objeto, un aparato que controla la fuerza del pie, su ángulo de trabajo, valora la fuerza de la pierna y su recuperación funcional, haciendo un trabajo sobre la articulación Tibio-Peroneo-Astragalino permitiendo su flexión dorsal, como plantar y midiendo su dinámica, desde el punto de vista mecánico, fisiológico y anatómico.
Antecedentes de la invención
De todos es conocido que cualquier movimiento que se aplique a la pierna y al pie, es una forma de ejercicio rehabilitador en sí.
En el mercado existen diferentes aparatos que nos sirven para rehabilitar el pie y la pierna. Pero los ejercicios que realizan van acompañados de otras partes del cuerpo, por ejemplo una bicicleta, pie metálico, pedales en sí. Estos aparatos, van acoplados a otras máquinas que hacen excesivas funciones o bien por si solo son demasiado sencillas.
Ello hace que no controlen, el trabajo de la pierna y pie y su articulación estrella "La Tibio-Peroneo-Astragalino" y que no sean capaces de hacer una rehabilitación adecuada en calidad-cantidad y método de medida en trabajo y ángulo de trabajo.
Para evitar el inconveniente, de todos estos utensilios y teniendo en cuenta que la patología del pie-tobillo y pierna es tan amplia y frecuente, debíamos pensar en un aparato que sea exclusivo, para rehabilitar lo dicho anteriormente, sin necesidad de buscar unidades de Fisiología del pie, que suelen estar ubicadas en Departamentos Universitarios o Laboratorios de Dinámica de la marcha.
El aparato objeto de la presente invención es un aparato muy técnico, de muy fácil manejo, de gran capacidad recuperadora desde la mínima expresión de la fuerza, hasta su límite personalizado a cada paciente, que permite la flexión de la articulación Tibio-Peroneo-Astragalino tanto dorsal, como plantar. Nos valora la fuerza que gana en cada momento y que realiza sólo cada paciente, sin necesidad de la ayuda de segundas personas, facilitando el trabajo de los fisioterapeutas, cuya misión sería sólo técnica y muy poco manual, disminuyendo el tiempo de recuperación con beneficio para paciente y para el entorno profesional.
Descripción de la invención
La invención en si consta de las siguientes partes: chasis fijo, chasis móvil, férulas pseudoinmovilizadoras, pie móvil o pedal móvil, base mecánica de trabajo, muelles de resistencia variables, medidor angular, dinamómetro y ruedas de soporte.
Breve descripción de los dibujos
Para mejorar la descripción de lo que está escrito, en la presente memoria, se acompaña los siguientes dibujos:
La figura primera, consiste en una vista en perspectiva del aparato con el pedal dispuesto para la flexión dorsal.
La figura segunda, se corresponde con una vista en alzado lateral de la figura primera.
La figura tercera, representa una vista en planta superior de la figura primera.
La figura cuarta, muestra una vista en alzado frontal de la figura primera.
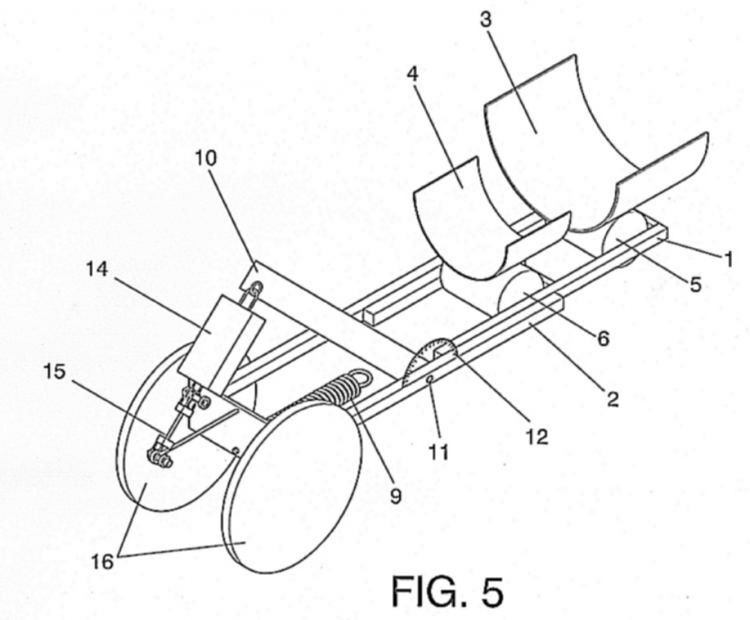
La figura quinta, consiste en una vista en perspectiva del aparato con el pedal dispuesto para la flexión plantar.
La figura sexta, se corresponde con una vista en alzado lateral de la figura quinta.
La figura séptima, representa una vista en planta superior de la figura quinta.
La figura octava, es una vista en alzado frontal de la figura quinta.
Descripción de una realización preferida
El aparato consta de: chasis de aluminio fijo (2) y chasis de aluminio móvil (1).
En el chasis móvil (1), se acopla una férula pseudoinmovilizadora del muslo (3) que se apoya sobre un soporte fijo (7) y otro apoyo sobre amortiguador de goma (5), que permite ligeros movimientos del muslo.
El chasis móvil (1) se desliza sobre el fijo (2) para regular la medida de cada paciente y es un movimiento telescópico de ensamblaje antero posterior.
Sobre la parte fija del chasis (2) se instala una férula de pierna (4), que se regula sobre orificios variables, según tamaño del paciente y apoya sobre soporte fijo (8) y sobre soporte amortiguador de goma (6).
Otro componente, es un pedal móvil (10) sobre un eje (11) transversal del chasis fijo (2), que trabaja en un ángulo en el sentido antero-posterior y postero-anterior, de flexión dorsal y flexión plantar respectivamente, con unos topes de 145º (12a) y 80º (12b).
Para medir estos ángulos acoplamos un medidor angular (12) con una parte fija al chasis fijo (2) y una parte móvil que se desliza con el pedal, sincrónicamente dándonos la medida del recorrido de la articulación Tibio-Peroneo-Astragalin.
El trabajo del pie se realiza por un sistema de muelles de flexión plantar (9) que son de distintas resistencias desde cero al limite que queramos llevar.
Tenemos también muelles de flexión dorsal (13), que a su vez serán desde fuerzas cero hasta límites que queramos llegar.
Estos muelles (9) para la flexión plantar, llevan acoplados tensores y grilletes (15) dado que estirarlos manualmente no podríamos.
Para medir la fuerza del sistema de trabajo tenemos acoplado un dinamómetro electrónico-digital (14) sujeto por el mismo sistema de sujeción de los muelles (9), de una gran sensibilidad y que mide de (0 a 500) Kg. Este dinamómetro (14), se conecta mediante un interface PC a un ordenador. En el ordenador tomamos los datos que van saliendo, en cualquier momento que queramos medir la fuerza del pie-pierna y articulación. La sensibilidad de este sistema es total, pudiendo controlar rehabilitaciones de un momento a otro y en distintos tiempos. Estos datos se pasarían a gráficas para hacer valoraciones puntuales, en el intervalo que deseemos.
La dinámica del trabajo en esta invención preferida sería la siguiente: Sentado el paciente sobre una silla ergométrica, fijamos la extremidad inferior sobre las férulas (4), estando el pie apoyado sobre el pedal (10). El muslo descansa sobre la férula (3) con ésta en unos 30° de flexión sobre el chasis móvil (1) y la pierna apoya sobre la férula (4) del chasis fijo (2) con un ángulo de 10º-15º; de esta manera la planta del pie descansa por completo en el pedal (10), quedando sujeto con velcros para que no se mueva, en sincronía con el pedal (10).
En esta posición funcional, toda la anatomía de la pierna-tobillo-pie se activan y trabajan al ritmo que se quiera establecer.
El aparato en su totalidad, descansa sobre dos ruedas fijas (16) en el extremo distal, facilitando el ángulo de trabajo general a la posición que queramos adoptar.
Reivindicaciones:
1. Aparato de control-rehabilitación de pierna, pie y articulación Tibio-Peroneo-Astragalino, que esencialmente se caracteriza por constituirse mediante un chasis de aluminio móvil (1) y un chasis de aluminio fijo (2) con ruedas (16) de soporte, acoplados telescópicamente, presentando una férula (3) de muslo curvada transversalmente, que se apoya sobre un soporte fijo (7) y un amortiguador de goma (5) dispuestos en el chasis móvil (1), mientras el chasis fijo (2) dispone una férula de pierna (4) también curvada transversalmente, que se apoya sobre un soporte fijo (8) y sobre soporte amortiguador de goma (6), comprendiendo además un pedal móvil (10) articulado a un eje (11) transversal del chasis fijo (2) y un medidor angular (12) con una parte fija al chasis fijo (2) y una parte móvil que se desliza con el pedal (10) sincrónicamente, dándonos la medida del recorrido de la articulación Tibio-Peroneo-Astragalino, siendo susceptible el pedal (10) de quedar relacionado con su zona anterior del chasis fijo (2), por un muelle (13) para realizar la flexión dorsal o con un muelle (9) y un dinamómetro (14) para realizar la presión plantar.
2. Aparato de control-rehabilitación de pierna, pie y articulación Tibio-Peroneo-Astragalino, según la primera reivindicación, caracterizado porque para realizar la flexión dorsal, el muelle (13) está fijado entre la zona delantera del pedal (10) y la zona anterior del chasis fijo (2).
3. Aparato de control-rehabilitación de pierna, pie y articulación Tibio-Peroneo-Astragalino, según la primera reivindicación, caracterizado porque para realizar la flexión plantar, el muelle (13) está fijado entre la zona posterior del pedal (10) y la zona anterior del chasis fijo (2), mientras que en la zona delantera del pedal (10) y la zona anterior del chasis fijo (2), está dispuesto un dinamómetro (14) mediante tensores y grilletes (15).
Patentes similares o relacionadas:
SISTEMA ROBOTIZADO PORTATIL PARA REHABILITACION FUNCIONAL ASISTIDA DE ARTICULACIONES, del 31 de Julio de 2020, de Gogoa Mobility Robots, S.L: 1. Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de: a) un actuador […]
Dispositivo de estiramiento de fascia plantar y tendón de aquiles, del 29 de Julio de 2020, de RODRÍGUEZ SANZ, David: 1. Dispositivo de estiramiento de la fascia plantar y el tendón de Aquiles caracterizado porque comprende una pieza semicircular como apoyo del pie con dos […]
Dispositivo exoesqueleto de movilidad de piernas con un mecanismo de accionamiento mejorado que emplea un acoplamiento magnético/eléctrico, del 22 de Julio de 2020, de Parker-Hannificn Corporation: Un dispositivo de movilidad que comprende: un conjunto de accionamiento que incluye un miembro de accionamiento rotatorio ; un componente accionado […]
SISTEMA ROBOTIZADO PORTÁTIL PARA LA REHABILITACIÓN FUNCIONAL ASISTIDA DE ARTICULACIONES, del 9 de Julio de 2020, de Gogoa Mobility Robots, S.L: Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de un actuador compuesto por […]
Aparato de terapia, del 8 de Julio de 2020, de Lime Medical GmbH: Aparato de terapia para realizar un movimiento continuo, pasivo y/o asistido activamente de los dedos y del pulgar de la mano de un paciente, que comprende: […]
Sistema electromédico automatizado y método de gestión relacionado, del 1 de Julio de 2020, de Lauro Group S.r.l: Sistema electromédico automatizado para tratar, curar, analizar y monitorizar una pluralidad de condiciones médicas relacionadas con la columna […]
DISPOSITIVO DE REHABILITACIÓN PARA LAS EXTREMIDADES INFERIORES, del 25 de Junio de 2020, de HOSPITAL SANT JOAN DE DEU: El dispositivo de rehabilitación para las extremidades inferiores comprende un suspensor para colocar un arnés para un usuario del dispositivo de rehabilitación […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 13 de Mayo de 2020, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado […]