MECANISMO PARA LA CONSECUCION DE CAMBIOS DE TRAYECTORIA EN MOVILES DE JUGUETE DIRIGIDOS A DISTANCIA.
Mecanismo para la consecución de cambios de trayectoria en móviles de juguete dirigidos a distancia,
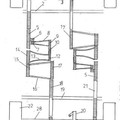
caracterizado por cuanto el cajetín contenedor del micromotor eléctrica y sistema reductor convencional de que estará inferiormente está atravesado por el eje que lleva unidas las ruedas de roda dura;el piñón atravesado por dicho eje, engranado a una semi-corona dentada prolongación inferior de un cilindro compuesto por dos piezas encajadas entre sí una dentro de otra, la exterior de las cuales se halla anclada por medio de un resorte a la pared interna del cajetín, conformando dicha pieza anteriormente una pluralidad de salientes dentados que encajarán en la posición idónea en las ranuras o depresiones practicadas en la segunda de las piezas que se en anos pivotes frontales que se situan y resbalan sobre un saliente estructurado en la pared interna del cajetín solidariza dose al núcleo de la segunda de las piezas, un disco portador de un saliente excéntrico que se aloja en la ranura longitudinal de una pieza plana provista de otra ranura que abarca en el desplazamiento de la pieza al pivote vertical emergente de la pieza sobresaliente del chasis, conformando la citada pieza plana por su extremo libre una entalla o ranura en la que se aloja al saliente superiormente emergente de las piezas que sirven para la fijación de las ruedas al chasis, cuyas ruedas no motrices, tienen los pivotes de unión abarcados por horquillas que conforman por ambos extremos una pletina direccional fija por el centro; con todo lo cual al invertir el sentido de giro del micromotor mediante el conveniente mando a distancia, para lo cual el mecanismo llevará las conexiones oportunas, el móvil caminará hacia atrás por lo que se producirá el desembrague, es decir el desengrane de la rueda dentada del cilindro con el piñón del eje motriz y por consiguiente el desalojo de los salientes en diente de la pieza envolvente de las ranuras del disco, no accionando el saliente excéntrico del mismo a la barra que actúa sobre la dirección, pero cuando a invertir el sentido de giro se produce el que, es decir el engrane de la corona dentada y el piñón, encajamiento de los salientes en las ranuras y por consiguiente el accionamiento de él saliente excéntrico del disco sobre la ranura de la pletina direccional, cambiando la trayectoria volverá a seguir en linea recta cuando se invierta de nuevo el sentido de la corriente para volver a cambiar de dirección en sentido opuesto al accionar de nuevo el mando a distancia para que se produzca la inversión del sentido de giro.
Tipo: Resumen de patente/invención.
Solicitante: JUGUETES ROMAN, S.A..
Nacionalidad solicitante: España.
Provincia: ALICANTE.
Fecha de Solicitud: 14 de Noviembre de 1980.
Fecha de Publicación: .
Fecha de Concesión: 7 de Julio de 1981.
Clasificación Internacional de Patentes:
- A63H31/08 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63H JUGUETES, p. ej. TROMPOS, MUÑECOS, AROS O JUEGOS DE CONSTRUCCION. › A63H 31/00 Transmisiones para juguetes. › Mecanismos de control de las transmisiones; Transmisiones para producir un movimiento alternativo.
Patentes similares o relacionadas:
 Juguete de vaivén con espirales, del 20 de Mayo de 2014, de PORRAS VILA,F. JAVIER: El coche de vaivén con espirales, mejorado, es un juguete, o, un objeto móvil, que utiliza dos engranajes multiplicadores , paralelos e invertidos, formados, cada uno […]
Juguete de vaivén con espirales, del 20 de Mayo de 2014, de PORRAS VILA,F. JAVIER: El coche de vaivén con espirales, mejorado, es un juguete, o, un objeto móvil, que utiliza dos engranajes multiplicadores , paralelos e invertidos, formados, cada uno […]
 Aparato visualizador, del 11 de Diciembre de 2013, de Brennan, John Michael: Un aparato visualizador , incluyendo dicho aparato;
un soporte que tiene al menos una superficie de soporte ;
una pluralidad de elementos de visualización […]
Aparato visualizador, del 11 de Diciembre de 2013, de Brennan, John Michael: Un aparato visualizador , incluyendo dicho aparato;
un soporte que tiene al menos una superficie de soporte ;
una pluralidad de elementos de visualización […]
VEHICULO DE JUGUETE., del 16 de Marzo de 2005, de STADLBAUER SPIEL- UND FREIZEITARTIKEL GMBH: Vehículo de juguete, especialmente para pistas de carreras de automóviles guiados por un carril, con un motor de accionamiento que presenta […]
ACTUADOR PARA MOVIMIENTO DE ARRANQUE -PARADA, PRINCIPALMENTE EN ROBOTSCAMINANTES, Y EL PROCEDIMIENTO PARA SU CONTROL., del 16 de Marzo de 2005, de CONSEJO SUP. INVESTIG. CIENTIFICAS: Actuador para movimientos de arranque-parada, principalmente en robots caminantes, y el procedimiento para su control. Actuador para movimientos […]
ENGRANAJE DE PIÑON Y CREMALLERA CON TOPE TERMINAL Y PROTECCION CONTRA SOBRECARGAS., del 16 de Marzo de 2004, de LEGO A/S INTERLEGO AG: Un engranaje de cremallera y una rueda de engranajes en acoplamiento operativo uno con otro, por medio del cual el movimiento de la cremallera produce […]
ACTUADOR PARA LAS PIERNAS DE UN ROBOT CAMINANTE., del 16 de Octubre de 2003, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS: Actuador para las piernas de un robot caminante. El actuador para las piernas de un robot caminante, en su mayor parte robots bípedos, con un elemento […]
"MUÑECO DURMIENTE MEDIANTE MECIMIENTO O TOMA DE BIBERON", del 16 de Febrero de 1998, de ONILCO INNOVACION, S.A.: MUÑECO DURMIENTE MEDIANTE MECIMIENTO O TOMA DE BIBERON. EL MUÑECO INCORPORA UN MECANISMO DE TRANSMISION ACCIONADO POR UN MOTOR, QUE HACE GIRAR A UNA […]
TRANSMISION MECANICA PARA COCHES DE JUGUETE., del 1 de Diciembre de 1996, de PEG PEREGO PINES S.P.A.: UNA TRANSMISION MECANICA EN PARTICULAR PARA COCHES DE JUGUETE, QUE CONSTA DE UN ELEMENTO SUSTANCIALMENTE CILINDRICO QUE GIRA AXIALMENTE SEGUN UNA CONEXION CINEMATICA […]