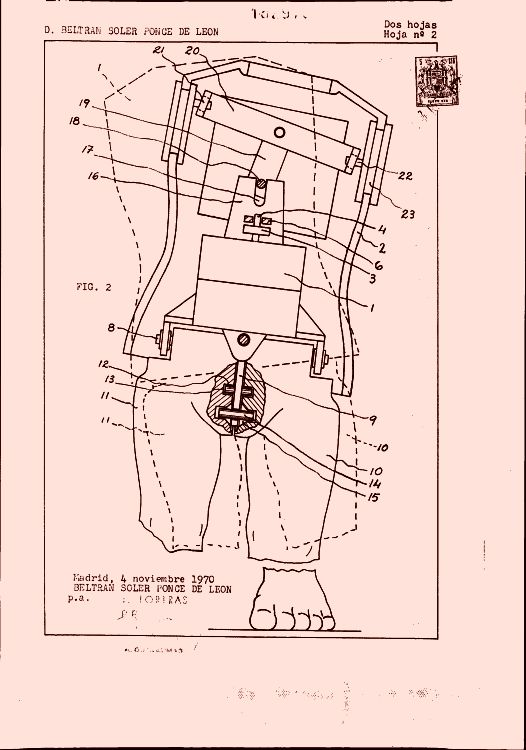
MECANISMO ANDADOR PARA MUÑECO.
Mecanismo andador para muñeco, que se caracteriza porque a la carcasa que conforma el tronco de este último,
y a la altura de su correspondiente cintura, en sentido artero-posterior, se la articula una pieza en forma de plataforma, la cual cobija en su interior un motor eléctrico accionado por pilas, así como un engranaje reductor que comunica giro a una excéntrica, la cual lleva un pivote que se introduce en un coliso previsto en un saliente interior, solidario de la parte anterior del tronco del muñeco, estando asimismo provista la plataforma de dos orejas enfrentadas, situadas transversalmente respecto a la articulación de la plataforma con el tronco, previéndose entre ambas orejas un vástago horizontal que, a un tiempo que atraviesa una pletina alargada, diametralmente dispuesta en la aludida plataforma, atraviesa también las dos extremidades inferiores del muñeco por aquella parte que se corresponde con sus respectivas caderas, ya que dichas extremidades se prolongan superiormente, a partir de la articulación femoral, para llegar hasta dicha altura, siendo recubiertas hasta la articulación antes aludida por la carcasa que conforma el tronco del muñeco, estando asimismo articuladas, las mencionadas extremidades, en relación alineada y en sentido descendente, a aquella pletina alargada, en primer lugar por unos tetones dispuestos en oposición sobre la misma pletina y que penetran, holgadamente en sendos orificios enfrentados previstos en las extremidades, e inferiormente, por una corta varilla que, pasando a través de un orificio dispuesto en el extremo de la pletina, se introduce, por ambos extremos, en sendos orificios enfrentados y previstos, también, en las mismas extremidades, todo ello de una forma holgada, tal como la anterior, con el fin de facilitar cierto movimiento angular, en sentido antero-posterior, a ambas extremidades, ya que al accionar el interruptor de puesta en marcha del mecanismo y girar la excéntrica, su excéntrica, al deslizarse por el coliso perteneciente a la carcasa que conforma el tronco, comunica, tanto a éste como a la plataforma que lleva articulada en su interior, y, por ende, a las extremidades que se articulan a esta última, unos movimientos oscilatorios alternativos y compensados, siendo las extremidades las que describen un movimiento angular de avance que hace caminar al muñeco ya que mientras un pie se afirma en el suelo, el otro avanza, y así alternativamente.
Tipo: Resumen de patente/invención.
Solicitante: SOLER PONCE DE LEON,BELTRAN.
Fecha de Publicación: .
Clasificación antigua:
- A63H11/18 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63H JUGUETES, p. ej. TROMPOS, MUÑECOS, AROS O JUEGOS DE CONSTRUCCION. › A63H 11/00 Figuras que se desplazan por sí mismas. › Figuras que realizan un movimiento natural de marcha.
Patentes similares o relacionadas:
 Robot humanoide jugador, método y sistema de utilización de dicho robot, del 4 de Diciembre de 2015, de Aldebaran Robotics: Robot humanoide que comprende al menos un procesador configurado para que el robot se desplace sobre unos miembros inferiores, efectúe movimientos de miembros […]
Robot humanoide jugador, método y sistema de utilización de dicho robot, del 4 de Diciembre de 2015, de Aldebaran Robotics: Robot humanoide que comprende al menos un procesador configurado para que el robot se desplace sobre unos miembros inferiores, efectúe movimientos de miembros […]
ACTUADOR PARA MOVIMIENTO DE ARRANQUE -PARADA, PRINCIPALMENTE EN ROBOTSCAMINANTES, Y EL PROCEDIMIENTO PARA SU CONTROL., del 16 de Marzo de 2005, de CONSEJO SUP. INVESTIG. CIENTIFICAS: Actuador para movimientos de arranque-parada, principalmente en robots caminantes, y el procedimiento para su control. Actuador para movimientos […]
MECANISMO PARA MOVER LAS EXTREMIDADES INFERIORES DE UNA FIGURA DE JUGUETE., del 16 de Junio de 2004, de GIOCHI PREZIOSI LUSSEMBURGO S.A.: Mecanismo para mover las extremidades inferiores conectadas al cuerpo de una figura de juguete con el fin de permitir que dicha figura de juguete […]
CONJUNTO DE MOVIMIENTO, PARTICULARMENTE PARA LAS PIERNAS DE UNA MUÑECA., del 1 de Mayo de 2004, de GIOCHI PREZIOSI S.P.A.: UN ENSAMBLAJE DE MOVIMIENTO, EN PARTICULAR PARA LAS PIERNAS DE UNA MUÑECA INCLUYE UNA TRANSMISION ACCIONADA POR ENGRANAJE, EN LA QUE LA RUEDA EXTREMA, ACOPLADA […]
ACTUADOR PARA LAS PIERNAS DE UN ROBOT CAMINANTE., del 16 de Octubre de 2003, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS: Actuador para las piernas de un robot caminante. El actuador para las piernas de un robot caminante, en su mayor parte robots bípedos, con un elemento […]
MODELO MECANICO DE UN ANIMAL, del 16 de Enero de 2002, de STADLBAUER, ANDREAS: LA INVENCION SE REFIERE A UN MODELO MECANICO DE UN ANIMAL, ESPECIALMENTE UN PERRO DE JUGUETE CON PATAS DELANTERAS Y PATAS TRASERAS QUE SE ENCUENTRAN DISPUESTAS […]
MECANISMO DE MOVIMIENTO, EN PARTICULAR, PARA JUGUETES., del , de NUOVA CEPPI RATTI S.P.A.: UN MECANISMO DE MOVIMIENTO PARA JUGUETES, PARTICULARMENTE PARA MOVER LAS PIERNAS DE UNA MUÑECA O UN TITERE CON UN MOVIMIENTO ANGULAR ALTERNO SIMILAR AL PASEO, […]
MUÑECO ANDADOR PERFECCIONADO., del 1 de Marzo de 1999, de MIJER, S.A.: MUÑECO ANDADOR PERFECCIONADO. SE PROPORCIONA UN MUÑECO CON PIERNAS DE MUÑECO RIGIDAS IMPULSADAS CON UN MOVIMIENTO DE VAIVEN, UN DISPOSITIVO […]