MECANISMO DE MOVIMIENTO, EN PARTICULAR, PARA JUGUETES.
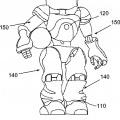
UN MECANISMO DE MOVIMIENTO PARA JUGUETES, PARTICULARMENTE PARA MOVER LAS PIERNAS DE UNA MUÑECA O UN TITERE CON UN MOVIMIENTO ANGULAR ALTERNO SIMILAR AL PASEO,
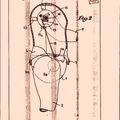
COMPRENDE UN CUERPO (12) QUE GIRA ALREDEDOR DE UN PRIMER EJE (A) Y QUE COMPRENDE UNA RUEDA DENTADA DE TORNILLO SIN FIN (18) QUE TIENE POLEAS LATERALES EXCENTRICAS INTEGRALES, DESVIADAS DE FORMA ANGULAR ENTRE SI. UNA VARILLA DE CONTROL (24, 26) ESTA RESTRINGIDA PARA CADA POLEA TENIENDO UN EXTREMO QUE GIRA EN LA PERIFERIA DE LA POLEA, UNA EXTENSION DE LA VARILLA QUE SE DESLIZA EN UNA RANURA O PUNTO DE APOYO (30, 32). EL GIRO DE LA RUEDA DENTADA DE TORNILLO SIN FIN ESTABLECE LAS VARILLAS EN MOVIMIENTO CON UN DESVIO DE MOVIMIENTO ANGULAR DE FORMA ANGULAR PARA UNA VARILLA Y LA OTRA. CADA VARILLA ESTA FABRICADA CONVENIENTEMENTE DE HILO DE METAL, EL CUAL EN EL EXTREMO RESTRINGIDO A LA POLEA FORMA UN BUCLE O ANILLO QUE SE DESLIZA LIBREMENTE ALREDEDOR DE LA POLEA.
Tipo: Resumen de patente/invención.
Solicitante: NUOVA CEPPI RATTI S.P.A.
Nacionalidad solicitante: Italia.
Dirección: VIA DELLE PRIMULE, 5,20020 COGLIATE (MILANO).
Inventor/es: ROMAN, TANIA.
Fecha de Publicación: .
Fecha Concesión Europea: 12 de Abril de 2000.
Clasificación Internacional de Patentes:
- A63H11/00 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63H JUGUETES, p. ej. TROMPOS, MUÑECOS, AROS O JUEGOS DE CONSTRUCCION. › Figuras que se desplazan por sí mismas.
- A63H11/18 A63H […] › A63H 11/00 Figuras que se desplazan por sí mismas. › Figuras que realizan un movimiento natural de marcha.
Patentes similares o relacionadas:
 Robot humanoide jugador, método y sistema de utilización de dicho robot, del 4 de Diciembre de 2015, de Aldebaran Robotics: Robot humanoide que comprende al menos un procesador configurado para que el robot se desplace sobre unos miembros inferiores, efectúe movimientos de miembros […]
Robot humanoide jugador, método y sistema de utilización de dicho robot, del 4 de Diciembre de 2015, de Aldebaran Robotics: Robot humanoide que comprende al menos un procesador configurado para que el robot se desplace sobre unos miembros inferiores, efectúe movimientos de miembros […]
ACTUADOR PARA MOVIMIENTO DE ARRANQUE -PARADA, PRINCIPALMENTE EN ROBOTSCAMINANTES, Y EL PROCEDIMIENTO PARA SU CONTROL., del 16 de Marzo de 2005, de CONSEJO SUP. INVESTIG. CIENTIFICAS: Actuador para movimientos de arranque-parada, principalmente en robots caminantes, y el procedimiento para su control. Actuador para movimientos […]
MECANISMO PARA MOVER LAS EXTREMIDADES INFERIORES DE UNA FIGURA DE JUGUETE., del 16 de Junio de 2004, de GIOCHI PREZIOSI LUSSEMBURGO S.A.: Mecanismo para mover las extremidades inferiores conectadas al cuerpo de una figura de juguete con el fin de permitir que dicha figura de juguete […]
CONJUNTO DE MOVIMIENTO, PARTICULARMENTE PARA LAS PIERNAS DE UNA MUÑECA., del 1 de Mayo de 2004, de GIOCHI PREZIOSI S.P.A.: UN ENSAMBLAJE DE MOVIMIENTO, EN PARTICULAR PARA LAS PIERNAS DE UNA MUÑECA INCLUYE UNA TRANSMISION ACCIONADA POR ENGRANAJE, EN LA QUE LA RUEDA EXTREMA, ACOPLADA […]
ACTUADOR PARA LAS PIERNAS DE UN ROBOT CAMINANTE., del 16 de Octubre de 2003, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS: Actuador para las piernas de un robot caminante. El actuador para las piernas de un robot caminante, en su mayor parte robots bípedos, con un elemento […]
MODELO MECANICO DE UN ANIMAL, del 16 de Enero de 2002, de STADLBAUER, ANDREAS: LA INVENCION SE REFIERE A UN MODELO MECANICO DE UN ANIMAL, ESPECIALMENTE UN PERRO DE JUGUETE CON PATAS DELANTERAS Y PATAS TRASERAS QUE SE ENCUENTRAN DISPUESTAS […]
MUÑECO ANDADOR PERFECCIONADO., del 1 de Marzo de 1999, de MIJER, S.A.: MUÑECO ANDADOR PERFECCIONADO. SE PROPORCIONA UN MUÑECO CON PIERNAS DE MUÑECO RIGIDAS IMPULSADAS CON UN MOVIMIENTO DE VAIVEN, UN DISPOSITIVO […]
 MUÑECA ANDADORA, del 16 de Julio de 1972, de GIROUD,GERMAIN: Muñeca andadora, del tipo en el cual la parte superior del cuerpo está animada de un movimiento alternativo de balanceo lateral con respecto a la parte inferior […]
MUÑECA ANDADORA, del 16 de Julio de 1972, de GIROUD,GERMAIN: Muñeca andadora, del tipo en el cual la parte superior del cuerpo está animada de un movimiento alternativo de balanceo lateral con respecto a la parte inferior […]