MÉTODO PARA EL CONTROL EN TIEMPO REAL DEL ENFOQUE DINÁMICO EN SISTEMAS DE IMAGEN ULTRASÓNICA Y DISPOSITIVO CALCULADOR DE ADELANTO DE MUESTREO ASOCIADO AL MISMO.
Método para el control en tiempo real del enfoque dinámico en sistemas de imagen ultrasónica y dispositivo calculador de adelanto de muestreo asociado al mismo.
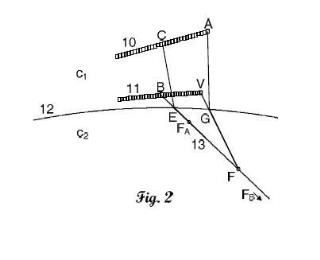
La presente invención divulga un dispositivo y un método que realizan la focalización dinámica en sistemas de imagen ultrasónica, aplicables a inspecciones con presencia de un medio de acoplamiento entre el transductor y la parte inspeccionada. Los sistemas de imagen ultrasónica comprenden un array de N elementos transductores que emiten pulsos ultrasónicos con tiempos de vuelo característicos a puntos focales dentro del objeto a inspeccionar. La presente invención calcula un array virtual equivalente en tiempos de vuelo al array de N elementos, donde cada elemento perteneciente al array de N elementos virtual se calcula a partir de las coordenadas de dos focos FA y FB, ambos situados en un rayo principal, y de la ecuación: tK = tCF + tFA - tBF - tFV donde tCF, tFA, tBF, tFV son los tiempos de vuelo característicos, y tK es una constante independiente de la posición del punto focal.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201230799.
Solicitante: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC).
Nacionalidad solicitante: España.
Inventor/es: FRITSCH YUSTA,CARLOS, MORENO LLAMAS,JOSE MIGUEL, BRIZUELA SANCHEZ,JOSE, CAMACHO SOSA DIAS,JORGE, FERNÁNDEZ CRUZA,Jorge, MEDINA VALDÉS,Luis.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B8/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › Diagnóstico utilizando ondas ultrasónicas, sónicas o infrasónicas.
- G02B7/40 FISICA. › G02 OPTICA. › G02B ELEMENTOS, SISTEMAS O APARATOS OPTICOS (G02F tiene prioridad; elementos ópticos especialmente adaptados para ser utilizados en los dispositivos o sistemas de iluminación F21V 1/00 - F21V 13/00; instrumentos de medida, ver la subclase correspondiente de G01, p. ej. telémetros ópticos G01C; ensayos de los elementos, sistemas o aparatos ópticos G01M 11/00; gafas G02C; aparatos o disposiciones para tomar fotografías, para proyectarlas o para verlas G03B; lentes acústicas G10K 11/30; "óptica" electrónica e iónica H01J; "óptica" de rayos X H01J, H05G 1/00; elementos ópticos combinados estructuralmente con tubos de descarga eléctrica H01J 5/16, H01J 29/89, H01J 37/22; "óptica" de microondas H01Q; combinación de elementos ópticos con receptores de televisión H04N 5/72; sistemas o disposiciones ópticas en los sistemas de televisión en colores H04N 9/00; disposiciones para la calefacción especialmente adaptadas a superficies transparentes o reflectoras H05B 3/84). › G02B 7/00 Monturas, medios de regulación o uniones estancas a la luz para elementos ópticos. › utilizando el retardo de las ondas reflejadas, p. ej. de ondas ultrasónicas.
Fragmento de la descripción:
Método para el control en tiempo real del enfoque dinámico en sistemas de Imagen ultrasónica y dispositivo calculador de adelanto de muestreo asociado al mismo
OBJETO DE LA INVENCIÓN
Esta invención descubre un método y un dispositivo para controlar automáticamente y en tiempo real el enfoque a todas las profundidades en sistemas de imagen ultrasónica. La presente invención opera tanto con medios homogéneos como cuando hay un acoplamiento (cuña, agua, etc.) entre el transductor y el medio inspeccionado, es decir, medios heterogéneos.
ANTECEDENTES DE LA INVENCIÓN
Los sistemas de imagen ultrasónica se basan en un conjunto o array de N elementos transductores que, al ser excitados eléctricamente, emiten pulsos ultrasónicos en el medio que se desea inspeccionar. El instante de emisión de cada elemento está temporizado para enviar el pulso ultrasónico en una dirección determinada. Se denomina ley focal al conjunto de retardos que deflectan y enfocan dicho pulso en una dirección y rango determinados. Cambiando la ley focal de emisión se modifica la dirección del pulso ultrasónico emitido (deflexión) para realizar un barrido angular de la región de interés.
En recepción, los ecos producidos por discontinuidades en el medio inspeccionado llegan al receptor, el cual, con frecuencia, coincide con el emisor. Las señales recibidas se amplifican y digitalizan. A estas señales también se les aplican leyes focales que hacen una recepción selectiva de los ecos generados por reflectores situados a cierta profundidad en la dirección del haz emitido.
Para ello, hay que compensar las diferencias de tiempo de vuelo en ¡da y vuelta desde el instante de emisión (que se supone originado en el centro del array) a cada foco y a cada elemento. Esta operación, denominada focalización o enfoque dinámico, requiere modificar dinámicamente el conjunto de retardos aplicados para cada muestra o, alternativamente, capturar selectivamente los ecos en los instantes en que se supone que llegan desde cada foco a cada elemento. Al realizar la suma de las muestras así obtenidas se obtiene una traza enfocada a todas las profundidades.
El proceso se repite para cada ángulo de deflexión del haz, realizando un barrido de la zona inspeccionada. Al visualizar la Intensidad de las señales de eco recibidas y enfocadas, la Imagen muestra la amplitud de los reflectores en las posiciones que ocupan.
Existe una amplia bibliografía de métodos para realizar la focalización dinámica, como S. C. Miller et al., Method and apparatus for providing dynamically variable time delays for ultrasound beamformer, US Pat. 5.844.139, 1 Dic. 1998, y M. D. Poland, Ultrasonic diagnostic imaging with automatic adjustment of beamforming parameters, US2007/0088213 A1, Apr. 19, 2007.
Uno de los aspectos claves de este proceso es la determinación y gestión dinámica de los retardos de enfoque a aplicar a las señales recibidas por cada elemento y para cada muestra. Como es bien conocido, tales retardos han de programarse con una resolución del orden de 1/16 a 1/64 el periodo de la señal, y son diferentes para cada canal y para cada muestra de la señal recibida. Como la frecuencia de muestreo de las señales de eco es elevada (típicamente entre 10 y 50 MHz), el volumen de Información que supone el conjunto de los retardos de enfoque dinámico es considerable.
En el pasado se han proporcionado métodos que permiten compactar la Información requerida por el proceso de enfoque dinámico a un bit por foco y canal (C. Fritsch et al., Composición coherente de señales por corrección focal progresiva, Pat. 2004/00203, 30 Ene. 2004). Sin embargo, es preciso calcular todos los retardos de enfoque, codificarlos y almacenarlos en memorias del sistema de imagen como paso previo a su utilización en tiempo real.
Para evitar este proceso, se han propuesto técnicas que calculan los retardos de enfoque en tiempo real o controladores de enfoque. En K. Jeon et al., An efficient real time focusing delay calculation in ultrasonic imaging systems, Ultrasonic Imaging, 16, pp. 231-248, 1994, se describe una técnica basada en el algoritmo del punto medio usado en funciones gráficas de computación que evalúa las leyes focales en tiempo real; en R. Beaudln, M. Anthony, Delay Generator for phased array ultrasound beamformer, US Pat. 5522391, 4 Jun. 1996, se describe una técnica similar para realizar un generador de retardos en tiempo real; en S. Park et al., Real-time digital reception focusing method and apparatus adopting the same, US Pat. 5669384, 23 Sept. 1997, se propone el método del punto medio para realizar un generador de reloj que determina el Instante de muestreo en cada canal para realizar la focalización dinámica; en M. Bae, Focusing delay calculation method for real-time digital focusing and apparatus adopting the same, US Pat. 5836881, 17 Nov. 1998 se modifica la patente anterior para obtener los retardos de enfoque; en H. T. Feldkámper ef al., Low power delay calculation for digital beamforming in handheld ultrasound systems, Proc. IEEE Ultrason. Symp., 2, pp. 1763-1766, 2000 se propone otra variante que calcula los retardos de enfoque en tiempo real con menor consumo energético; en R.
Alexandru, Delay controller for ultrasound receive beamformer, US Pat. 7804736 B2, 28 Sep. 2010 se propone otro circuito que evalúa los retardos de enfoque con un número limitado de recursos.
Si bien estas técnicas son útiles para operar en medios homogéneos, ninguna de ellas es válida para calcular las leyes focales en tiempo real cuando hay varios medios de propagación, ya que los algoritmos y circuitos descritos en las referencias citadas consideran que el ultrasonido se propaga con velocidad constante por un único medio homogéneo.
Sin embargo, una situación habitual en Ensayos No Destructivos, es la inserción de una cuña o una suela entre el transductor y la pieza a inspeccionar, o bien la inspección se realiza por inmersión de la pieza en agua. En estos casos existen dos medios de propagación: el del acoplamiento (material de la cuña, suela o agua) y el de la pieza, cada uno de ellos con su propia velocidad de propagación. Por tanto, no son aplicables las técnicas mencionadas, ya que en la interfaz entre ambos materiales han de aplicarse las leyes de refracción, aspecto no considerado por los métodos conocidos para calcular las leyes focales en tiempo real.
En la actualidad, a falta de controladores de enfoque en tiempo real, los cálculos han de realizarse previamente mediante métodos numéricos. Las leyes focales resultantes deben ser programadas en memorias para su utilización posterior en tiempo real. Los requisitos de memoria son elevados y, además, en espacios separados para cada canal.
Además, es bien conocido que, cuando existe una interfaz entre dos medios con velocidades de propagación diferentes, el cálculo de las leyes focales es costoso en tiempo. En primer lugar hay que determinar el punto de entrada en la pieza de un hipotético rayo para cada elemento y cada foco según las leyes de la refracción (aplicación de la ley de Snell o del principio de Fermat), lo cual requiere un proceso de aproximaciones sucesivas para cada foco y cada elemento. Posteriormente, se determinan los tiempos de vuelo en ida y vuelta del ultrasonido en ambos medios siguiendo el rayo así determinado. Finalmente, se obtienen las leyes focales de las diferencias en los tiempos de vuelo y, de éstas, los códigos de enfoque. El proceso requiere un tiempo considerable de cálculo cuando se quiere realizar la focalización dinámica de todas las muestras adquiridas.
Por consiguiente, es muy deseable obtener un dispositivo que evite este proceso previo y facilite el cálculo de las leyes focales en tiempo real dentro del propio sistema de imagen con total generalidad, esto es, tanto para medios homogéneos como para aplicaciones con un medio de acoplamiento interpuesto entre transductor y pieza. Proporcionar tal método y dispositivo es el objeto de la presente invención.
DESCRIPCIÓN DE LA INVENCIÓN
La presente invención divulga un dispositivo calculador de adelanto de muestreo que controla en tiempo real el enfoque dinámico de todas las muestras adquiridas, operando indistintamente en medios homogéneos o en medios heterogéneos, es decir, en aplicaciones donde exista un medio de acoplamiento entre transductor y pieza.. Se entiende por tiempo real el intervalo de tiempo predefinido para que se produzca un acontecimiento.
El problema se aborda en dos pasos:
i) Una fase de preparación o método por el cual se obtiene un array virtual equivalente en tiempo de vuelo del ultrasonido que opera en un único medio, evitando las complicaciones asociadas al paso de una interfaz (refracción,...
Reivindicaciones:
1. Método para el control en tiempo real del enfoque dinámico en sistemas de Imagen ultrasónica, donde los
sistemas de imagen ultrasónica comprenden un array de N elementos transductores que emiten pulsos ultrasónicos con
tiempos de vuelo característicos a una diversidad de puntos focales comprendidos dentro de un objeto a inspeccionar; el método está caracterizado por que comprende:
calcular un array de N elementos virtual equivalente en tiempos de vuelo al array de N elementos transductores comprendido en el sistema de imagen ultrasónica, donde las coordenadas (xv, zv) de cada elemento perteneciente al array de N elementos virtual se calculan a partir de las coordenadas de dos focos Fa y Fb,
ambos situados en un rayo principal que parte del centro C del array de N elementos transductores y el punto
focal F, y de la ecuación:
A CF FA ~ tBF ~ ^FV
donde los ícf, ífa, íbf, ífv son los tiempos de vuelo característicos entre cada dos puntos indicados en los subíndices, siendo B el centro del array de N elementos virtual, A" el transductor del array de N elementos transductores que recibe el eco del rayo principal y V el punto del array de N elementos virtual correspondiente al punto A, y tKes una constante independiente de la posición del punto focal; y, donde dicho array de N elementos virtual es independiente del tipo de objeto a inspeccionar y del medio de acoplamiento entre el array de N elementos transductores y el objeto inspeccionado.
2. Método para el control en tiempo real del enfoque dinámico en sistemas de imagen ultrasónica según la reivindicación 1, caracterizado porque uno de los focos Fa es ubicado en las proximidades de una interfaz que separa dos medios, uno de los medios alberga al array de N elementos transductores y el otro medio alberga al objeto a inspeccionar, y el otro foco Fb es ubicado en el límite del campo cercano, dado por el rango:
D2
rb=
B 4Á
donde Da es el tamaño de la apertura y Á=c2/f la longitud de onda en el segundo medio, siendo f la frecuencia fundamental del transductor.
3. Método para el control en tiempo real del enfoque dinámico en sistemas de imagen ultrasónica según la reivindicación 1, caracterizado por que el tiempo de vuelo característico tn de los elementos del array de N elementos virtual a un punto focal n, el cual pertenece a la diversidad de puntos focales, se calcula en tiempo real mediante el
cálculo de una estimación tn tal que:
siendo v un valor arbitrario mayor que la unidad.
4. Método para el control en tiempo real del enfoque dinámico en sistemas de imagen ultrasónica según la reivindicación 3, caracterizado por que el cálculo de la estimación tn tiene asociado un error que se encuentra acotado
mediante el cálculo de una variable binaria Q que incrementa la estimación tn en 1 o en 1-1/v para obtener la siguiente estimación tn+l, dependiendo de si la estimación es menor o mayor que el valor actual f.
5. Dispositivo calculador de adelanto de muestreo adecuado para llevar a cabo el método definido en una cualquiera de las reivindicaciones anteriores, que comprende tres registros (21, 22, 23) que cargan sendas variables iniciales, un contador, un primer multiplicador (29), cuatro sumadores (24, 25, 26, 27) y un multiplexor (30) que calcula en tiempo real la variable binaria Q de un 1 bit definida en la reivindicación 4; donde un sumador (26) de los cuatro sumadores recibe la señal de un registro (22) a la que le resta la señal de otro registro (21) tras pasar, dicha señal, por un multiplicador (28), otro sumador (25) de los cuatro sumadores y el primer multiplicador (29); la salida de dicho un sumador (26) se conecta a otro sumador (27) y la salida de este se conecta a un registro (23), cuya salida está conectada a la entrada del control del multiplexor (30) que conecta su salida con una de sus entradas de valor 1 y 1-2/v en función del valor de la entrada de control.
6. Dispositivo calculador de adelanto de muestreo, según la reivindicación 5, caracterizado porque los dos registros son cargados con unos valores iniciales que están determinados por las posiciones de los elementos del array de N elementos virtual definido en una cualquiera de las reivindicaciones 1 a 4 y de un tiempo resultado del cálculo de la
estimación tn definido en una cualquiera de las reivindicaciones 3 a 4.
Patentes similares o relacionadas:
 Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
FUNDA ELECTRÓNICA PARA ADAPTACIÓN DE DISPOSITIVOS MÓVILES CON INSTRUMENTOS DE DIAGNÓSTICO MÉDICO MULTIDISCIPLINAR, del 27 de Julio de 2020, de RUESGA DELGADO,OSCAR: Funda electrónica para adaptación de dispositivos móviles con instrumentos de diagnóstico médico multidisciplinar que comprende una funda de uso electrónico […]
Sonda de ultrasonidos con alojamiento y punta intercambiable, del 1 de Julio de 2020, de ECHOSENS: Una sonda de ultrasonidos que comprende una punta intercambiable , un alojamiento de sonda de ultrasonidos , al menos un imán (12, […]
Un dispositivo para realizar anestesia regional, del 3 de Junio de 2020, de The Queen Elizabeth Hospital King's Lynn NHS Foundation Trust: Un dispositivo de administración anestésica que comprende: a) una aguja anestésica regional; (b) un tubo de alimentación y un dispositivo de infusión en […]
Escáner de ultrasonido portátil, del 13 de Mayo de 2020, de Innuvatech S.r.l: Procedimiento operativo de un escáner de ultrasonido portátil , dicho escáner de ultrasonido portátil comprende: - transductores adecuados para […]
DISPOSITIVO DE SUJECIÓN PARA SONDA ECOGRÁFICA, del 5 de Mayo de 2020, de CALVO LOBO, César: 1. Dispositivo de sujeción para la sonda ecográfica , caracterizado por dos piezas izquierda y derecha enfrentadas, formadas por dos partes perpendiculares […]
Método para análisis y procesamiento de datos de dispositivo de detección de elasticidad, y dispositivo de detección de elasticidad, del 15 de Abril de 2020, de Wuxi Hisky Medical Technologies Co., Ltd: Método para análisis y procesamiento de datos de un dispositivo de detección de elasticidad, comprendiendo el dispositivo de detección de elasticidad […]
Transductor ultrasónico de resonancia, del 1 de Abril de 2020, de CHONGQING RONGHAI MEDICAL ULTRASOUND INDUSTRY LTD: Un transductor ultrasónico de resonancia que comprende una primera fuente de ultrasonidos para transmitir ultrasonidos y una unidad de reflexión […]