Sistemas de obtención de imágenes de visión trasera para vehículo.
Sistema de obtención de imágenes de visión trasera para un vehículo (10),
que comprende:
por lo menos una cámara (12) de vídeo montada en el vehículo para proporcionar un campo de visión (FoV) horizontal de gran angular por detrás del vehículo,
un dispositivo de visualización (14) en el vehículo en una posición visible por el conductor, y
un procesador (16) de vídeo configurado para subdividir el campo de visión (FoV) de cámara en unos campos de visión (FoV) subsidiarios izquierdo (LH), derecho (RH) y central y visualizar dichos campos de visión (FoV) subsidiarios en regiones adyacentes, separadas visualmente por unas barras de frontera verticales (20) en la pantalla del dispositivo de visualización para simular campos de visión de espejos laterales en los lados de la visualización, con una visualización de visión trasera que se ajusta por separado en el centro,
en el que la posición y/o extensión horizontal de por lo menos un campo de visión (FoV) subsidiario puede variar en función del movimiento del vehículo,
caracterizado por que cuando el vehículo está yendo marcha atrás y girando en una dirección particular, la frontera entre el campo de visión (FoV) central y el campo de visión (FoV) subsidiario, en el lado del vehículo en la dirección en la que el vehículo está yendo marcha atrás y girando, se desplaza hacia ese lado del vehículo.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2013/067671.
Solicitante: FotoNation Limited.
Nacionalidad solicitante: Irlanda.
Dirección: Cliona, Building 1, Parkmore East Business Park Ballybrit, Galway IRLANDA.
Inventor/es: CORCORAN,PETER, BIGIOI,PETRONEL, STEC,PIOTR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60R1/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › Disposiciones para la visibilidad óptica (equipo antideslumbrante, p. ej. polarizador, para parabrisas o ventanas B60J 3/00).
PDF original: ES-2533594_T3.pdf
Fragmento de la descripción:
Sistemas de obtención de imágenes de visión trasera para vehículo.
Campo
La presente invención se refiere a un sistema de obtención de imágenes de visión trasera para automóviles y otros vehículos.
Antecedentes
La patente US n° 4.214.266 describe un sistema de ayuda visual para asistir a un operario mientras realiza maniobras con un vehículo. El sistema descrito por la patente US n° 4.214.266 incluye un sistema de vídeo de circuito cerrado que incluye un aparato de medición de distancia. El sistema permite al operario ver por detrás del vehículo y, a través de la utilización del aparato de indicación de distancia, el operario puede saber lo lejos que se encuentra la parte trasera del vehículo de objetos vistos a través del sistema de vídeo.
La patente US n° 5.67.935 describe un sistema de visión trasera para un vehículo que incluye por lo menos un dispositivo de captura de imágenes dirigido hacia atrás con respecto al sentido de desplazamiento del vehículo. Un sistema de visualización, por ejemplo, que incluye cualquiera de las presentaciones visuales 2, 2, 2", o 2" ilustradas esquemáticamente en la patente US n° 5.67.935, proporciona una imagen sintetizada a partir de la salida del dispositivo de captación de imágenes. El sistema de visualización descrito en la patente US n° 5.67.935 puede ser contiguo al campo de visión delantero del conductor del vehículo a una longitud focal que está por delante del habitáculo de pasajeros del vehículo. Pueden proporcionarse una pluralidad de dispositivos de captura de imágenes como se expone en la patente US n° 5.67.935 y el sistema de visualización puede visualizar una imagen unitaria sintetizada a partir de salidas de los dispositivos de captación de imágenes que se aproximan a una vista orientada hacia atrás desde una única ubicación, tal como por delante del vehículo.
La patente US n° 6.559.761 divulga un sistema de visualización de visión desde arriba para un vehículo. El sistema de visualización dado a conocer en la patente US n° 6.559.761 incluye un indicador de vehículo de referencia dentro de un campo de visión desde arriba y por lo menos tres segmentos de visualización de campo de visión. Cada segmento de visualización representa una región física adyacente al vehículo de referencia e incluye un primer indicador adaptado para visualizar la existencia de otro vehículo dentro de la región y la distancia relativa entre el vehículo de referencia y el otro vehículo. En otra forma de realización dada a conocer en la patente US n° 6.559.761, cada segmento de visualización de campo de visión incluye un segundo indicador adaptado para representar un sentido de cambio de distancia relativa entre el vehículo de referencia y el otro vehículo, y posiblemente los tipos de vehículo. Por tanto, el sistema de visualización dado a conocer en la patente US n° 6.559.761 comunica información sobre el entorno de funcionamiento del vehículo al operario del vehículo al tiempo que intenta limitar el grado de distracción del conductor. Se desea disponer de un sistema de obtención de imágenes de visión trasera que reduzca adicionalmente la distracción del conductor.
La patente US n° 7.139.412 describe medios para crear una "vista de pájaro" sintetizada de una zona alrededor de un vehículo. En la patente US n° 7.139.412 se describen múltiples cámaras (CAM1) a (CAM8) para grabar la periferia de un vehículo local estando montadas en el vehículo. Cuando se obtienen, las imágenes de cámara se sintetizan y visualizan en una pantalla de un dispositivo de visualización. En la patente US n° 7.139.412 se describen datos de píxel para imágenes de cámara que constituyen una imagen sintetizada que está compensada, de modo que se reducen las diferencias en los datos de píxel para imágenes de cámara adyacentes. En un ejemplo descrito en la patente US n° 7.139.412, los datos de píxel se corrigen de modo que sus valores sean iguales a los valores promedio de los datos de píxel para imágenes de cámara adyacentes. Se desea disponer de una imagen de visión trasera más informativa pero que aún pueda verse fácilmente en una visualización para que la vea el usuario de un vehículo.
La patente US n° 7.881.496 describe un sistema de visión para un vehículo que incluye un dispositivo de obtención de imágenes que presenta un sensor de obtención de imágenes, un microcontrolador de cámara, un dispositivo de visualización que presenta un elemento visualización, un microcontrolador de visualización y por lo menos una entrada de usuario que puede accionar de manera selectiva un usuario. El dispositivo de obtención de imágenes comunica una señal de imagen al dispositivo de visualización a través de un enlace de comunicación. El microcontrolador de visualización afecta a la señal de imagen en respuesta a dicha por lo menos una entrada de usuario. El microcontrolador de cámara monitoriza la señal de imagen en el enlace de comunicación y ajusta una fundón del dispositivo de obtención de imágenes en respuesta a una detección de la señal de imagen afectada. El sistema de visión descrito en la patente US n° 7.881.496 puede ajustar una visualización o sensor del sistema en asociación con un sistema de detección de distancia. Se desea disponer de un sistema de obtención de imágenes de visión trasera mejorado.
La patente US n° 8.15.21 describe un sistema de síntesis de imágenes para un vehículo para proporcionar al conductor una imagen orientada hada abajo de la vista que rodea los 36 grados del coche. El sistema incluye: una
primera cámara, que se utiliza para grabar una primera imagen de la periferia del vehículo; una segunda cámara, que se utiliza para grabar una segunda imagen de la periferia del vehículo, en el que la segunda imagen y la primera Imagen presentan una reglón solapada. Un dispositivo de procesamiento de imágenes dado a conocer en la patente US n° 8.15.21 Incluye un componente de definición y un componente de síntesis, que se utiliza para sintetizar la primera Imagen y la segunda Imagen y emitir una tercera imagen. Se utiliza un dispositivo de visuallzaclón para visualizar la tercera Imagen. Se desea disponer de un sistema que gestione la síntesis de objetos en reglones que se solapan de modo que no se distorsionen los objetos.
La patente US n° 6.734.896 y la patente US n° 7.714.887 describen un procesador de imágenes que está programado para generar una Imagen sintetizada natural a partir de imágenes de cámara tomadas con una pluralidad de cámaras que capturan los alrededores de un vehículo. Una sección de almacenamiento de parámetros almacena una pluralidad de grupos de parámetros de síntesis de imagen que representan la correspondencia entre las imágenes de cámara y la imagen sintetizada y que presentan diferentes relaciones de resolución temporal o espacial. Una sección de selección de parámetros selecciona el grupo de parámetros de síntesis de imagen según la salida de una sección de detección de movimiento de vehículo para detectar el movimiento del vehículo tal como la velocidad y sentido de conducción. Una sección de síntesis de imagen genera la imagen sintetizada a partir de las Imágenes de cámara según el grupo de parámetros de síntesis de imagen seleccionado.
El documento EP 2 476 587 divulga capturar una imagen de los alrededores de un vehículo y generar una primera Imagen que presenta una forma rectangular y una segunda imagen que presenta una forma de paralelogramo no rectangular. Se genera y se visualiza una pantalla de visualización que comprende la primera imagen y la segunda imagen, dispuestas una al lado de la otra, siendo continuos entre sí los contenidos de imagen de las imágenes primera y segunda y siendo también paralelos entre sí los lados adyacentes de las imágenes primera y segunda.
El documento JP 6227318 divulga un sistema de obtención de imágenes de visión trasera para un vehículo según el preámbulo de la reivindicación 1.
Sumario
Según la presente invención se proporciona un sistema de obtención de imágenes de visión trasera para un vehículo caracterizado según la reivindicación 1.
Breve descripción de los dibujos
A continuación se describirán formas de realización de la invención, a modo de ejemplo, con referencia a los dibujos adjuntos, en los que:
Las figuras 1Ay 1B ¡lustran y vistas lateral y desde arriba esquemáticas respectivamente de un automóvil según determinadas formas de realización.
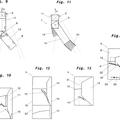
Las figuras 2A a 2D ilustran un campo de visión de gran angular (WFoV) global de una cámara que se divide mediante un procesador de vídeo en tres FoV subsidiarios cuando un vehículo está yendo marcha atrás según determinadas... [Seguir leyendo]
Reivindicaciones:
1. Sistema de obtención de imágenes de visión trasera para un vehículo (1), que comprende:
por lo menos una cámara (12) de vídeo montada en el vehículo para proporcionar un campo de visión (FoV) horizontal de gran angular por detrás del vehículo,
un dispositivo de visualización (14) en el vehículo en una posición visible por el conductor, y
un procesador (16) de vídeo configurado para subdividir el campo de visión (FoV) de cámara en unos campos de visión (FoV) subsidiarios izquierdo (LH), derecho (RH) y central y visualizar dichos campos de visión (FoV) subsidiarios en regiones adyacentes, separadas visualmente por unas barras de frontera verticales (2) en la pantalla del dispositivo de visualización para simular campos de visión de espejos laterales en los lados de la visualización, con una visualización de visión trasera que se ajusta por separado en el centro,
en el que la posición y/o extensión horizontal de por lo menos un campo de visión (FoV) subsidiario puede variar en función del movimiento del vehículo,
caracterizado por que cuando el vehículo está yendo marcha atrás y girando en una dirección particular, la frontera entre el campo de visión (FoV) central y el campo de visión (FoV) subsidiario, en el lado del vehículo en la dirección en la que el vehículo está yendo marcha atrás y girando, se desplaza hacia ese lado del vehículo.
2. Sistema de obtención de imágenes de visión trasera según la reivindicación 1, en el que la región de la pantalla de visualización que visualiza el campo de visión (FoV) central se alarga a expensas de por lo menos otra región de la pantalla de visualización, cuando el vehículo está yendo marcha atrás y girando en dicha dirección particular.
3. Sistema de obtención de imágenes de visión trasera según la reivindicación 1 o 2, en el que los campos de visión subsidiarios se estrechan cuando el vehículo se mueve hacia delante.
4. Sistema de obtención de imágenes de visión trasera según la reivindicación 3, en el que los campos de visión subsidiarios se estrechan progresivamente a medida que la velocidad del vehículo aumenta.
5. Sistema de obtención de Imágenes de visión trasera según la reivindicación 1 o 2, en el que el campo de visión (FoV) horizontal de gran angular de la cámara de vídeo es de por lo menos 135 grados.
6. Sistema de obtención de Imágenes de visión trasera según la reivindicación 1 o 2, en el que el campo de visión (FoV) vertical de la cámara de vídeo es de por lo menos 7 grados.
7. Sistema de obtención de Imágenes de visión trasera según la reivindicación 1 o 2, en el que dicha por lo menos una cámara de vídeo comprende múltiples cámaras, y en el que el campo de visión (FoV) horizontal de gran angular por detrás del vehículo se deriva de dichas múltiples cámaras.
8. Sistema de obtención de Imágenes de visión trasera según la reivindicación 1, en el que el procesador de vídeo responde a la detección de un objeto en primer plano (22) dentro de un campo de visión de cámara para ajustar los campos de visión (FoV) subsidiarlos Izquierdo (LH) o derecho (RH) en consecuencia.
9. Sistema de obtención de Imágenes de visión trasera según la reivindicación 1, en el que el procesador de vídeo responde a la detección de un objeto en primer plano (22) cuando dicho vehículo está yendo marcha atrás, para rotar el campo de visión (FoV) central en la dirección de marcha atrás de modo que el objeto en primer plano, desviado en la dirección de marcha atrás, se visualiza dentro del campo de visión (FoV) central.
1. Sistema de obtención de imágenes de visión trasera según la reivindicación 1, en el que dicha por lo menos una cámara está montada en la parte trasera del vehículo.
11. Sistema de obtención de imágenes de visión trasera según la reivindicación 1, en el que dicha por lo menos una cámara está montada dentro de un alojamiento del vehículo.
Patentes similares o relacionadas:
Panel de ventana con dispositivo de sujeción para unir piezas de accesorio y método de ensamblaje, del 15 de Julio de 2020, de SAINT-GOBAIN GLASS FRANCE: Una unidad de acristalamiento de vehículo que tiene un elemento acristalado y al menos una base para la fijación reversible de un accesorio a dicho […]
 Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Sistema de cámara y sistema de reemplazo de espejo, del 15 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de cámara para un vehículo, en particular a un vehículo comercial, comprendiendo: al menos una unidad de captación de imágenes […]
Sistema de asistencia a la conducción para un vehículo, vehículo ferroviario y procedimiento de uso asociados, del 18 de Diciembre de 2019, de ALSTOM Transport Technologies: Sistema de asistencia a la conducción para un vehículo que consta de una cabina acotada por una ventana y al menos un elemento […]
Estructura de visualización, del 4 de Diciembre de 2019, de Inbecam Oy: Una estructura de visualización para un sistema de visualización de punto ciego de un vehículo, estando dispuesta la estructura de visualización (DS) para instalarse en conexión […]
Aparato de control y procedimiento para un sistema de asistencia al conductor de un vehículo, del 13 de Noviembre de 2019, de CONTI TEMIC MICROELECTRONIC GMBH: Aparato de control (ECU) para un sistema de asistencia al conductor de un vehículo, que comprende un procesador de señales (DSP), que sirve para procesar datos […]
 Sistema de visión, del 18 de Septiembre de 2019, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo para la representación de una zona de grabación (A, B, C) situada por fuera del vehículo que comprende una […]
Sistema de visión, del 18 de Septiembre de 2019, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo para la representación de una zona de grabación (A, B, C) situada por fuera del vehículo que comprende una […]
Dispositivo de accionamiento para un elemento que se va a accionar, del 11 de Septiembre de 2019, de GEBR. BODE GMBH & CO. KG: Dispositivo de accionamiento para accionar un elemento, que presenta - un accionamiento de correa dentada con una correa dentada , - por lo menos un disco dentado […]