SISTEMA DE VERIFICACION DE LA CALIDAD DE LA MEDIDA DE VELOCIDAD EN SISTEMAS BASADOS EN RADAR DOPPLER.
Sistema de verificación de la calidad de la medida de velocidad en sistemas basados en radar doppler.
El sistema sirve para verificar la calidad de la medida de velocidad que proporcionan los sistemas basados en radar doppler. Para ello compara en tiempo real las medidas realizadas con el sistema desarrollado con las que envía el radar doppler a verificar. Para la comparación se realiza un análisis estadístico en el que se verifica si el radar instalado mide la velocidad de los vehículos en vías de tráfico dentro de las tolerancias permitidas según la legislación vigente. La calificación de calidad del radar objeto de estudio es inmediata al finalizar el análisis.En el sistema, se integra un equipo emisor de radio que envía desde el radar la señal analógica doppler y la señal digital del radar doppler, y un equipo receptor de radio de las señales anteriores además de un sistema de adquisición de datos , sincronismo, control y análisis
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200701348.
Solicitante: UNIVERSIDAD POLITECNICA DE MADRID.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: DE FRUTOS VAQUERIZO,JOSE, PASTOR PAZ,CARLOS, JIMENEZ MARTINEZ,FRANCISCO J.
Fecha de Solicitud: 17 de Mayo de 2007.
Fecha de Publicación: .
Fecha de Concesión: 2 de Febrero de 2012.
Clasificación Internacional de Patentes:
- G01P3/50 FISICA. › G01 METROLOGIA; ENSAYOS. › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › G01P 3/00 Medida de la velocidad lineal o angular; Medida de diferencias de velocidades lineales o angulares (G01P 5/00 - G01P 11/00 tienen prioridad; midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00). › para medir una velocidad lineal (G01P 3/56 tiene prioridad).
- G01S13/58F
- G06F19/00
Clasificación PCT:
- G01P3/50 G01P 3/00 […] › para medir una velocidad lineal (G01P 3/56 tiene prioridad).
- G01S13/58 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › Sistemas de determinación de velocidad o trayectoria; Sistemas de determinación del sentido del movimiento.
- G06F19/00
Fragmento de la descripción:
Sistema de verificación de la calidad de la medida de velocidad en sistemas basados en radar doppler.
Sector de la técnica
La invención se encuadra en el sector técnico de la instrumentación electrónica y más concretamente en la verificación de la calidad de la medida de velocidad.
Estado de la técnica
Los sistemas radar doppler están instalados en vías de tráfico y su funcionamiento está basado en la aplicación directa del efecto doppler. En el documento ES 2091756, se describe el procedimiento de estos sistemas para la obtención de la velocidad basándose en el efecto doppler.
Actualmente el estado de la técnica en la comprobación de la calidad de este tipo de sistemas está basado en el registro de la señal analógica procedente del sistema radar doppler antes de ser procesada y en el registro de la información en formato digital que proporciona el radar doppler después de ser procesada. Estas dos señales analógica y digital respectivamente, se registran por separado con diferentes sistemas. Se toman un número N de medidas, al paso de un número M de vehículos (M
El análisis espectral de la señal analógica que proporciona el radar doppler antes de ser procesada es la que contiene la información de la velocidad. Actualmente, se aplica esta señal, previamente registrada, a un analizador de espectro y se observa la frecuencia fundamental. Esta frecuencia fundamental es la llamada frecuencia doppler, fdoppler.
Como se puede observar, esta metodología presenta algunas imprecisiones:
• La frecuencia fundamental que se puede ver en el analizador no es constante, hay un Δfdoppler que no se contempla para luego calcular la velocidad. Esto implica un error a la hora de calcular la velocidad.
• Hay que realizar el cálculo de las velocidades, a posteriori, a partir de las fdoppler.
• El análisis comparativo entre el cálculo de la velocidad mediante el analizador de espectro y el proporcionado por el radar doppler, ha de hacerse tras haber calculado las velocidades. La sincronización entre la señal analógica y la digital se realiza de forma manual lo que implica un gasto excesivo en tiempo, e introduce un elemento de incertidumbre en la medida elevado.
Debido a lo expuesto anteriormente, sería deseable superar estas imprecisiones consiguiendo que la fdoppler detectada sea lo más exacta posible, que el cálculo de las velocidades se realizara de forma inmediata y que el análisis de las medidas realizadas a la entrada del radar doppler (señal analógica) y a la salida del radar doppler (señal digital) se realizase inmediatamente después de haber tomado la última medida de velocidad, sincronizando de forma automática ambas medidas.
Por ello, la invención que se describe se centra en el desarrollo de un sistema electrónico computerizado y el procedimiento de cálculo de la velocidad a partir de un conjunto de medidas de la fdoppler al paso de un vehículo en movimiento, del registro de las señales analógicas y digitales de forma sincronizada y de la elaboración y registro de un informe de resultados al finalizar la última medida de velocidad.
Descripción breve de la invención
El sistema sirve para verificar la calidad de la medida de velocidad que proporcionan los sistemas basados en radar doppler. Para ello compara en tiempo real las medidas realizadas con el sistema desarrollado con las que envía el radar doppler a verificar. Para la comparación se realiza un análisis estadístico en el que se verifica si el radar instalado mide la velocidad de los vehículos en vías de tráfico dentro de las tolerancias permitidas según la legislación vigente. La calificación de calidad del radar objeto de estudio es inmediata al finalizar el análisis.
En el sistema, se integra un equipo emisor de radio que envía desde el radar la señal analógica doppler y la señal digital del radar doppler, y un equipo receptor de radio de las señales anteriores además de un sistema de adquisición de datos, sincronismo, control y análisis.
Breve descripción de las figuras
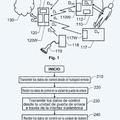
La figura 1 muestra un diagrama de bloques del dispositivo, siendo el cinemómetro doppler (1) el sistema del que se pretende verificar su calidad de medida. El cinemómetro entrega una señal doppler de naturaleza analógica y una señal digital con la medida realizada por el cinemómetro. El bloque (2) es un emisor comercial de radio a 2,4 GHz para transmitir la señal analógica y el bloque (3) es un modem comercial de radio para transmitir la señal digital. Los bloques (4) y (5) son los correspondientes receptores radio de las señales analógica y digital respectivamente. El bloque (6) es un sistema de adquisición de datos gobernado por el bloque (7) que es un ordenador PC. Los bloques (6) y (7) realizan las tareas de adquisición de los datos, medida y análisis.
Las figuras 2 y 3 muestran un ejemplo de señal en el tiempo de la señal analógica que proporciona el cinemómetro (1). En estas figuras se aprecia con claridad las zonas en las que hay información de frecuencia doppler, fdoppler y donde no la hay.
En la figura 3 se muestra, a modo de ejemplo, una señal en la que se detectarían 3 vehículos entre los instantes t1
La figura 4 muestra el diagrama de estados del software de medida que se describe a continuación:
Estado 1: Inicial
Comprueba la correcta sincronización entre el hardware y el software e inicializa variables. Se queda esperando a que el usuario pulse el botón Calibrar para que comience la calibración.
Estado 2: Busca Umbral
Analiza la "Señal Doppler" que envía el cinemómetro para fijar los niveles de amplitud con los que recibe dicha señal y poder discriminar el paso de un vehículo del ruido.
Realiza esta acción hasta que el usuario pulsa el botón Comenzar Medidas.
Estado 3: Midiendo
Analiza la "Señal Doppler" que envía el cinemómetro. Cuando detecta un vehículo calcula la velocidad del mismo en función de la frecuencia doppler. Compara la velocidad calculada con la "Señal Digital" que envía el cinemómetro. Si no recibe "Señal Digital", durante el paso de un vehículo o después de un tiempo limitado una vez que el vehículo ha pasado, desecha la medida.
Si la medida no se desecha pasa al estado 4 (Medida a Tabla).
Si la medida se desecha se queda en el estado 3 (Midiendo).
Estado 4: Medida a Tabla
Almacena la "Señal Doppler", en un archivo de audio, la velocidad detectada por el software a partir de la "Señal Doppler", la frecuencia fundamental de la misma señal y el dato digital correspondiente a la medida de velocidad que realiza el cinemómetro (1).
Estado 5: Genera Informe
Genera un informe detallado de todas las medidas realizadas y evalúa la correcta o incorrecta calibración del cinemómetro basándose en unas tolerancias.
Estado 6: Fin
Termina el programa liberando los recursos software y hardware que utiliza.
La figura 5 muestra el diagrama de flujo del estado "Midiendo" que es el estado en el que se realizan las operaciones de medida, procesado de señal y cálculo de la velocidad.
Descripción detallada
Es un sistema de verificación para cinemómetros tanto fijos como móviles y basados en efecto doppler, por medio de un sistema electrónico computerizado que mide la "Señal doppler" a la entrada del cinemómetro, calcula la velocidad a partir de esta señal, la compara con la que proporciona el propio cinemómetro, y determina las desviaciones entre ambas. En este sistema, las señales analógica y digital se transmiten y reciben vía radio, con etapa de sincronismo entre ambas y mediante un sistema electrónico computerizado que inicialmente ajusta el sistema fijando de manera automática los valores umbrales de amplitud de la señal doppler para así poder detectar la presencia de un vehículo. Posteriormente recoge la señal que supere los niveles...
Reivindicaciones:
1. Sistema de verificación de la calidad de la medida de velocidad en sistemas basados en radar doppler, fijos o móviles, del tipo que consta de un cinemómetro que genera señales de medida de velocidad analógicas y digitales, caracterizado por que consta de un emisor de radio para transmitir la señal analógica y de un módem comercial de radio para transmitir la señal digital, estando ambos conectados al cinemómetro por un cable, y de dos receptores de radio de las señales analógicas y digitales, respectivamente, unidos a un ordenador a través de otro cable, y porque con esa disposición de emisor-módem-receptor calcula las desviaciones de la medida proporcionada por el cinemómetro, a través de las siguientes etapas:
2. Etapa de autoajuste del sistema según la reivindicación 1, que consta de las siguientes etapas:
3. Etapa de detección de presencia de vehículos según la reivindicación 1 caracterizada por las siguientes etapas:
4. Etapa de recogida de la señal doppler a partir de la amplitud del tono de la misma según la reivindicación 1 que consta de las siguientes etapas:
5. Etapa de cálculo de la velocidad del vehículo que pasa por la zona de influencia del cinemómetro según las reivindicaciones 1, que consta de las siguientes etapas:
6. Etapa de emparejamiento entre las medidas de velocidad realizadas a partir de la señal doppler a la entrada del cinemómetro y las medidas digitales realizadas por el cinemómetro, según la reivindicación 1 que consta de las siguientes etapas:
7. Etapa de generación y almacenamiento de un informe con el resultado de la verificación, según la reivindicación 1, que consta de las siguientes etapas:
8. Sistema computerizado electrónico para la verificación de radares móviles basados en el efecto doppler, según reivindicación 1 y 5, caracterizado porque calcula la velocidad del vehículo como suma de la velocidad del vehículo portador y la velocidad detectada por el sistema de verificación.
Patentes similares o relacionadas:
Sistemas y métodos para tratar, diagnosticar y predecir la aparición de una afección médica, del 15 de Julio de 2020, de Fundação D. Anna Sommer Champalimaud E Dr. Carlos Montez Champalimaud: Aparato para evaluar si es probable que un paciente tenga un estadio patológico favorable de cáncer de próstata, el aparato comprende: (a) un dispositivo de obtención […]
Dispositivo de procesamiento de datos para el procesamiento de valores de medición, del 22 de Abril de 2020, de F. HOFFMANN-LA ROCHE AG: Dispositivo de procesamiento de datos para el procesamiento de valores de medición de un equipo de medición médico, con una unidad de entrada , una […]
Sistema de análisis apuntador de acontecimientos y de gestión de medicación, del 30 de Octubre de 2019, de CAREFUSION 303, INC: Un método para reducir el riesgo de errores de medicación, el método comprende las etapas de: recibir en un dispositivo móvil un primer valor de un parámetro […]
Sistema y método de visualización en 2D y 3D para la inspección de un tubo de horno, del 11 de Septiembre de 2019, de Quest Integrity USA, LLC: Un sistema para la visualización de datos de inspección recogidos de un horno con una geometría física especificada, en donde dicho horno comprende […]
 Reconocimiento anatómico y análisis dimensional para asistir en la cirugía de mama, del 25 de Julio de 2019, de ALLERGAN, INC.: Método implementado por ordenador de determinación de mediciones de la mama de manera automática a partir de una representación tridimensional (3-D) de la parte superior […]
Reconocimiento anatómico y análisis dimensional para asistir en la cirugía de mama, del 25 de Julio de 2019, de ALLERGAN, INC.: Método implementado por ordenador de determinación de mediciones de la mama de manera automática a partir de una representación tridimensional (3-D) de la parte superior […]
Sistemas y métodos para tratar, diagnosticar y predecir la aparición de una afección médica, del 24 de Julio de 2019, de Fundação D. Anna Sommer Champalimaud E Dr. Carlos Montez Champalimaud: Un aparato para evaluar un riesgo de fallo clínico en un paciente después de que el paciente se haya sometido a una prostatectomía radical, y el aparato […]
 Aparato médico controlado remotamente, del 24 de Julio de 2019, de GAMBRO LUNDIA AB: Una unidad de diálisis adaptada para tratar la sangre de un paciente (P) según una terapia prescrita, la unidad de diálisis presenta una interfaz inalámbrica […]
Aparato médico controlado remotamente, del 24 de Julio de 2019, de GAMBRO LUNDIA AB: Una unidad de diálisis adaptada para tratar la sangre de un paciente (P) según una terapia prescrita, la unidad de diálisis presenta una interfaz inalámbrica […]
Interfaces de usuario gráficas (IUG), procedimientos y aparato para la presentación de datos, del 10 de Julio de 2019, de DUNE MEDICAL DEVICES LTD.: Un sistema de análisis de sustrato, comprendiendo el sistema: (a) una sonda que está configurada y operable para explorar un sustrato y determinar uno o más parámetros […]