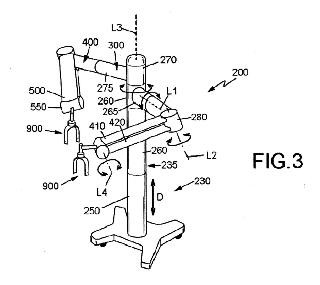
Comprende una estructura de soporte (230) donde se acopla de manera deslizante al menos un brazo (210;
220). Cada brazo (210; 220) comprende un primer y un segundo elemento (300, 400) articulados entre sí. El primer elemento (300) está articulado de manera giratoria en la estructura de soporte (230) y puede girar alrededor de un eje longitudinal (L1) y. el segundo elemento (400) puede recibir una articulación de por lo menos dos grados de libertad (550) para el acoplamiento de una herramienta (900). El eje longitudinal (L1) del primer elemento (300) es substancialmente perpendicular a un eje de articulación (L2) del primer elemento (300) y el segundo elemento (400).
Se obtiene una arquitectura simplificada que permite un movimiento espacial preciso y eficaz de la herramienta que sujeta el brazo (210; 220).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200901313.
SISTEMA ROBÓTICO PARA CIRUGÍA LAPAROSCÓPICA 5 Campo de la invención 1 O La presente invención se refiere a un sistema robótica destinado a la sujeción y manejo de una herramienta o útil quirúrgico para cirugía, en particular para cirugía laparoscópica mínimamente invasiva. El sistema robótica de la invención comprende una estructura de soporte en la cual se acopla de manera deslizante uno o varios brazos que pueden accionarse de manera remota desde una estación de teleoperación. 15 Cada uno de dichos brazos acoplados a la estructura de soporte está configurado como un conjunto articulado formado por dos elementos. Ambos elementos están articulados entre sí y, a su vez, el primer elemento puede girar respecto a la estructura de soporte. 20 25 30 Antecedentes de la invención La invención tiene aplicación general en el campo de la cirugía robótica y en particular en el campo de la cirugía mínimamente invasiva. En la cirugía mínimamente invasiva se realizan incisiones de menores dimensiones respecto a las realizadas en una intervención convencional, lo que requiere un accionamiento muy preciso de la herramienta quirúrgica. A través de tales incisiones se realizan las operaciones quirúrgicas, incluyendo la introducción de cámaras de visión (laparoscopia) para obtener la imagen de órganos internos y transmitirlas a un monitor de televisión a través del cual el cirujano puede guiarse para realizar dichos procedimientos quirúrgicos. Estos procedimientos quirúrgicos a través de cirugía robótica se realizan a distancia utilizando estaciones de teleoperación conectadas a un sistema robótica por medio de líneas de comunicación dedicadas. 35 Los sistemas robóticas comprenden arquitecturas diseñadas para comportarse de manera similar al brazo humano, permitiendo ubicar el extremo de un brazo robot en distintas posiciones. Dichas arquitecturas están formadas por uno o varios brazos montados en una estructura de soporte y formados por elementos articulados de manera que pueden moverse en el espacio adecuadamente para accionar una herramienta, órgano terminal o efector final, tal como una pinza u otro dispositivo para realizar operaciones 5 quirúrgicas. Su movimiento va accionado a través de las órdenes recibidas a distancia a través de la estación de teleoperación. Cada uno de dichos brazos es una estructura articulada formada por varios elementos articulados entre sí y montados de manera giratoria respecto a la 1 O estructura de soporte. Un ejemplo de arquitectura de hrazo robótico de elementos articulados es el robot conocido como Scara, que presenta libertad de movimientos en los ejes X e Y, si bien están limitados en sus desplazamientos en el eje vertical Z, donde normalmente se realizan manipulaciones simples y en desplazamientos de corta distancia. 15 Las limitaciones de estas arquitecturas normalmente se suplen a través de un uso intensivo de electrónica y mecanismos complejos para disponer un sistema robótico adecuado para la cirugía mínimamente invasiva. Esto implica un sistema robótico indeseablemente costoso debido a la gran 20 complejidad del conjunto. El documento US2003208186 describe un mecanismo robótico de tres grados de libertad que compre!lde una estructura de soporte en la cual se acopla de manera deslizante verticalmente un brazo. El brazo está formado por un 25 primer elemento y un segundo elemento articulados entre sí. El primer elemento está articulado a la vez estructura de soporte y a través del mismo puede posicionarse una herramienta. Sin embargo, esta arquitectura presenta el inconveniente de que no permite orientar la herramienta adecuadamente para poder introducirla mediante de un instrumento de cirugía (trocar) . 30 El documento US5762458 se refiere a un sistema para realizar intervenciones de cirugía cardíaca mínimamente invasiva. Dicho sistema está constituido por unos brazos articulados adaptados para manejar una herramienta en el espacio. Dichos brazos presentan varios grados de libertad y, en una 35 realización, incorpora tres articulaciones motorizadas (de accionamiento en desplazamiento y rotación) , dos articulaciones pasivas y una articulación motorizada de accionamiento en rotación de la herramienta dispuesta en el extremo del brazo. Este sistema robótica presente el inconveniente de que no permite un posicionamiento totalmente eficaz de la herramienta a través de la incisión en el paciente. 5 Descripción de la invención La presente invención propone un sistema robótica para cirugía laparoscópica, particularmente aunque no exclusivamente, para cirugía mínimamente invasiva. El sistema robótica de la invención presenta una 1 O configuración notablemente más simple que los sistemas robóticas que los que para el mismo fin se vienen utilizando hasta ahora. Además de la simplicidad estructural del sistema robótica que se propone, la invención presenta un sistema robótica para cirugía laparoscópica con una arquitectura particular capaz de orientar adecuadamente una herramienta, órgano terminal 15 o efector final, tal como una pinza o dispositivo adecuado para realizar operaciones quirúrgicas, con gran movilidad para ser introducida adecuadamente a través de una incisión en el paciente. El sistema robótica para cirugía laparoscópica mínimamente invasiva de la 20 invención comprende una estructura de soporte formada por una columna vertical alrededor de cuyo eje longitudinal pueden girar los brazos. La columna puede ir montada fija sobre una plataforma preferiblemente provista de unas ruedas para facilitar su desplazamiento en caso de ser necesario. Uno o más brazos robóticas se acoplan de manera deslizante verticalmente 25 en la columna. En caso de disponerse más de un brazo robótica en la estructura de soporte, dichos brazos se acoplan con posibilidad de deslizamiento vertical para poder regular su altura al suelo y permitir, de este modo, posicionar una herramienta quirúrgica en la posición adecuada de manera eficaz. 30 Cada uno de los brazos del sistema robótica comprende un primer elemento y un segundo elemento. Ambos primer y segundo elemento están articulados entre sí a través de un eje o articulación. Por otra parte, el primer elemento del brazo está montado de manera giratoria en la estructura de soporte y, a 35 su vez, dicho primer elemento está adaptado para girar alrededor de su eje longitudinal. En particular, el primer elemento del brazo está montado de manera giratoria en una extensión solidaria de la estructura de soporte. El segundo elemento del brazo robótico está adaptado para recibir una articulación de por lo menos dos grados de libertad pasivos en su extremo para el acoplamiento de una herramienta o útil quirúrgico. En el caso de disponerse de más de un brazo robótico, los brazos pueden girar de manera 5 independiente entre sí alrededor del eje longitudinal de la estructura de soporte. Esta arquitectura permite simplificar considerablemente el conjunto. En algunas realizaciones de la invención, la citada articulación de por lo menos dos grados de libertad para el acoplamiento de una herramienta 1O puede ser de tres grados de libertad, tal como una articulación de tipo cardan. Con ello se consigue estabilidad en un eje (normalmente el eje de la dirección de la herramienta o instrumento) y un movimiento espacial adecuado para las operaciones de la herramienta a través de la incisión en el paciente al introducir dos grados de libertad pasivos en el sistema. 15 De este modo el conjunto dispone de un total de cinco grados de libertad (cuatro más el desplazamiento vertical de la estructura de soporte para el posicionamiento y la maniobrabilidad de la herramienta) con lo que la herramienta puede orientarse siempre en la dirección definida por el punto de 20 penetración en la cavidad realizada en el paciente (por ejemplo, la cavidad abdominal) por medio del trocar. En una realización, el eje longitudinal del primer elemento del brazo robótico puede ser por lo menos substancialmente perpendicular al eje de articulación 25 del primer elemento y el segundo elemento. El segundo elemento del brazo puede estar formado por dos barras ...
Reivindicaciones:
1. Sistema robótico (200) para cirugía laparoscópica que comprende una
estructura de soporte (230) en la cual se acopla de manera deslizante por lo
menos un brazo (21 O; 220) , estando formado dicho brazo (21 O; 220) por un · primer elemento (300) y un segundo elemento (400) articulados entre sí, estando montado el primer elemento (300) articulado de manera giratoria en la estructura de soporte (230) , caracterizado por el hecho de que el primer elemento (300) está adaptado para girar alrededor de un eje longitudinal (L1)
1 O y el segundo elemento (400) está adaptado para recibir una articulación de por lo menos dos grados de libertad (550) para el acoplamiento de una herramienta (900) .
2. Sistema robótico (200) según la reivindicación 1, caracterizado por el
hecho de que dicho eje longitudinal (L1) del primer elemento (300) es por lo menos substancialmente perpendicular a un eje (L2) de articulación mutua del primer elemento (300) y el segundo elemento (400) :
3. Sistema robótico (200) según la reivindicación 1 o 2., caracterizado por el
hecho de que la estructura de soporte (230) comprende una columna vertical alrededor de cuyo eje longitudinal (L3) pueden girar los brazos (21 O, 220) .
4. Sistema robótico (200) según la reivindicación 1, caracte'rizado por el hecho de que la articulación de por lo menos dos grados de libertad (500) 25 para el acoplamiento de una herramienta (900) es una articulación de tipo cardan.
5. Sistema robótico (200) según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que el segundo elemento articulado (400) está 30 formado por dos piezas (410, 420) en las cuales queda articulado el primer elemento del brazo (300) .
6. Sistema robótico (200) según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que comprende al menos dos de dichos brazos 35 (210, 220) articulados en dicha estructura de soporte (230) .
7. Sistema robótica (200) según la reivindicación 6, caracterizado por el hecho de que dichos brazos (21 O, 220) pueden girar de manera independiente entre sí alrededor del eje longitudinal (L3) de la estructura de soporte (230) .
8. Sistema robótica (200) según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que el primer elemento (300) está montado de manera giratoria en una extensión (265; 275) solidaria de la estructura de soporte (230) .
Patentes similares o relacionadas:
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento:
una sonda de terapia para producir energía para alterar el tejido; […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Sistemas y métodos para la fabricación de una plantilla dental, del 28 de Mayo de 2019, de ALIGN TECHNOLOGY, INC.: Método para fabricación de una plantilla dental para posicionar un objeto en un diente de un paciente,
que comprende:
crear un modelo de diente […]
Endoscopio y dispositivo de tratamiento de accesorios integrado, del 4 de Marzo de 2019, de C.R. BARD, INC.: Endoscopio integrado que comprende un vástago que tiene extremos proximal y distal, y un dispositivo de aposición de tejido en el extremo distal […]
Microscopio quirúrgico y sensor de frente de onda integrados, del 7 de Marzo de 2018, de ALCON RESEARCH, LTD.: Un dispositivo para medir propiedades de un ojo , comprendiendo el dispositivo :
un microscopio quirúrgico , un sensor de frente de […]
Fuente de alimentación para la identificación y control de herramientas quirúrgicas eléctricas, del 10 de Enero de 2018, de MICROLINE SURGICAL, INC: Un sistema para llevar a cabo cauterización térmica, que comprende:
al menos un dispositivo de cauterización térmica, y
una fuente de […]
Instalación para utilizar una plantilla con el fin de formar orificios para implantes en un maxilar, del 15 de Noviembre de 2017, de NOBEL BIOCARE SERVICES AG: Una instalación para formar orificios para implantes en un maxilar , comprendiendo la instalación una plantilla que se adapta a la forma […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]