Sistema robótico para la limpieza de cascos de barcos y otras superficies sumergidas.
Sistema robótico para la limpieza de cascos de barcos y otras superficies sumergidas.
La presente invención consiste en un robot que realiza la limpieza de superficies sumergidas, tanto curvas como planas, con cualquier orientación. Además, dicho robot es capaz de solventar cualquier obstáculo presente en las mismas, así como trasladarse a superficies dispuestas en distinto plano. Está caracterizado por tener dos módulos idénticos compuestos de una cámara de succión y de una carcasa, con capacidad para rotar una con respecto a la otra, y unidos mediante un brazo que permite movimientos relativos entre ellos.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201201130.
Solicitante: UNIVERSIDADE DA CORUÑA.
Nacionalidad solicitante: España.
Inventor/es: LOPEZ PEÑA,FERNANDO, FAIÑA RODRIGUEZ-VILA,Andres, DURO FERNANDEZ,Richard, SOUTO GARCIA,Daniel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B08B1/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B08 LIMPIEZA. › B08B LIMPIEZA EN GENERAL; PREVENCION DE LA SUCIEDAD EN GENERAL (cepillos A46; dispositivos para limpieza del hogar o análogos A47L; separación de partículas sólidas de líquidos o gases B01D; separación de sólidos B03, B07; pulverización o aplicación de líquidos u otros materiales fluidos sobre superficies en general B05; dispositivos de limpieza para transportadores B65G 45/10; operaciones combinadas de lavado, llenado y cierre de botellas B67C 7/00; inhibición de la corrosión o de la incrustación en general C23; limpieza de calles, de vías férreas, de playas o de terrenos E01H; partes constitutivas, detalles o accesorios de piscinas para nadar o para chapotear especialmente adaptados a la limpieza E04H 4/16; protección contra las cargas electrostáticas o supresión de estas cargas H05F). › Limpieza mediante procedimientos que implican la utilización de herramientas, de cepillos o elementos análogos (B08B 3/12, B08B 6/00, B08B 9/00 tienen prioridad).
- B62D57/04 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 57/00 Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M). › que tienen medios de propulsión diferentes de los contactos con el suelo, p. ej. por hélices (instalaciones de conjuntos reactores de propulsión B60K).
- B63B59/10 B […] › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › B63B 59/00 Protección de cascos especialmente adaptada para barcos; Dispositivos de limpieza especialmente adaptados para barcos. › utilizando carros transportadores o dispositivos análogos que se desplazan a lo largo de la superficie.

Fragmento de la descripción:
SISTEMA ROBóTICa PARA LA LIMPIEZA DE CASCOS DE BARCOS Y OTRAS SUPERFICIES SUMERGIDAS
Objeto de la invención La presente invención consiste en un robot que realiza la limpieza de superficies sumergidas, tanto curvas como planas, con cualquier orientación. Además, dicho robot es capaz de solventar cualquier obstáculo presente en las mismas, así como trasladarse a superficies dispuestas en distinto plano.
Sector de la técnica La presente invención se encuadra en el sector técnico de la automatización de limpieza de extensas superficies sumergidas, como por ejemplo cascos de barcos.
Estado de la técnica
Las adherencias de microorganismos marinos al casco de un buque que se producen durante la navegación, especialmente durante las paradas en puerto, provocan un aumento considerable del consumo de combustible, que es el mayor gasto al que debe hacer frente actualmente el sector naval. La utilización de pinturas anti-incrustantes y autopulimentantes consigue retrasar el crecimiento de los microorganismos pero no lo impide, por lo que la tendencia actual más común para eliminar la adhesión de microorganismos al casco del buque consiste en realizar labores de limpieza en el dique seco. Es decir, cada cierto tiempo, el buque ha de varar en un dique para diversas tareas de mantenimiento y reparación. Es en ese momento cuando se retiran del casco las incrustaciones de los diversos microorganismos marinos.
Existen diversas metodologías de limpieza, siendo la más común el uso de dispositivos mecánicos (cepillos giratorios) o hidráulicos (agua o aire a presión) operados manualmente. El problema reside en que la operación de estos sistemas es manual y, además, existe el riesgo de dispersión en el aire de componentes tóxicos de algunas pinturas, con el riesgo que de ello se deriva.
Se han desarrollado sistemas automatizados de limpieza que permiten operar en ausencia de personal y con métodos de captación de los posibles contaminantes que puedan ser expulsados a la atmósfera. Estos sistemas consisten en mecanismos móviles sobre estructuras que han de adaptarse a la forma del casco del buque para que la operación sea automática.
Sin embargo, las opciones presentadas en líneas anteriores todavía requieren de la detención del buque en dique y, por tanto, la parada de su labor comercial con la consecuente pérdida económica que de ello se deriva.
La limpieza, inspección y reparación submarina de cascos se puede clasificar en tres métodos: buzos profesionales, vehículos subacuáticos no tripulados operados remotamente y robots.
Los buzos profesionales ayudados con máquinas limpiadoras, normalmente de cepillos giratorios, recorren en su totalidad la obra viva del buque. En el documento de patente US5431122 se propone un aparato para la limpieza de cascos sumergidos manejado por un buzo que controla las ruedas motoras y la flotabilidad del mismo para limpiar por medio de una cuchilla vibratoria las adherencias, sin estropear la pintura, del casco.
Los vehículos subacuáticos operados remotamente (ROVs) se centran en tareas principalmente de inspección de cascos, pequeñas reparaciones, o pequeñas operaciones de limpieza del casco. En los documentos de patente US4821665 y US5947051 se muestran dos ROVs con capacidades para fijarse al casco diseñados para realizar tareas de inspección, mantenimiento y limpieza.
En cuanto a sistemas robóticos que trabajen adheridos al casco se menciona la patente US5174222. Este robot se desplaza mediante ruedas, obtiene la adherencia al casco mediante succión y limpia mediante cepillos giratorios. Otra patente similar es WO/2003/042029, que además de tener las mismas características de la anterior, tiene imanes permanentes para aumentar la adherencia al casco, lleva chorros a presión y rascadores y es capaz de realizar tareas de inspección y reparación.
Como se ha expuesto, la limpieza de los microorganismos marinos de la parte sumergida de los cascos de barcos puede realizarse por medio de buzos equipados con útiles de limpieza pero, dicha técnica, para barcos de medio/gran tamaño resulta inviable. Los vehículos subacuáticos operados remotamente (ROVs) presentan una gran versatilidad pero tienen un control complejo con un elevado consumo energético provocado por sus numerosos actuadores. Por último, los robots para la limpieza de cascos de barcos se basan principalmente en el uso de ruedas u orugas para moverse por el casco, obteniendo la adherencia a dicho casco con succión y/o con imanes permanentes, lo que implica que no puedan evitar discontinuidades u obstáculos en el casco y por tanto se emplean, básicamente, para la limpieza de grandes superficies planas o con altos radios de curvatura.
Con todo lo expuesto, sería por tanto deseable obtener un sistema robótico que permitiese limpiar la totalidad de la parte sumergida de los cascos de barcos, para lo cual, dicho sistema robótico debe ser capaz de cambiar de plano de trabajo, provocado por discontinuidades en los radios de curvatura de los cascos o porque estos radios son muy pequeños, V de sortear obstáculos comunes que existen en los cascos de los barcos, tales como, quillas de balance, tomas de mar, barquillas, etc. Además, debe poder realizarlo de forma automática V de manera que sea fácilmente puesto en marcha para poder emplearlo en las paradas en puerto del barco lo que permitiría no tener que parar al barco para limpiarlo en ningún momento. Es deseable, también, que el sistema tenga un diseño simple, robusto V con el mínimo número de actuadores que le proporcionen gran versatilidad de movimientos.
Para ello, la presente invención proporciona un robot capaz de desplazarse por una superficie sumergida con gran movilidad, va que permite salvar obstáculos V cambiar el plano de trabajo por el que se mueve. Otras características de esta invención son, por un lado, su reducido número de actuadores gracias a su novedosa configuración V, por otro, un diseño resistente a fallos va que en caso de que un módulo pierda adherencia existe otro que puede adherirse.
Este robot transporta las herramientas necesarias para efectuar la limpieza del casco (cepillos, chorros a presión, rascadores, etc.) , los elementos anticontaminación necesarios V distintas herramientas para la realización de labores de inspección. El sistema permite trabajar de manera telecontrolada o semi-autónoma con lo que se reducen los costes de limpieza. Además, es posible emplearlo para realizar una inspección del casco del barco, instalando los sistemas de inspección necesarios para tal efecto. De esta manera, se conseguiría realizar la limpieza de la totalidad del casco de un barco, con uno o más robots, en los tiempos en los que el barco se encuentra realizando la carga V descarga en puerto V, por tanto, evitando la parada del buque para la limpieza del casco V manteniendo el consumo del barco en el mínimo posible.
Descripción de la invención La presente invención se refiere a un sistema robótico destinado a la limpieza de superficies sumergidas, tanto planas como curvas, en cualquier orientación, siendo capaz de desplazarse sobre ellas, V solventar cualquier obstáculo presente en las mismas, así como trasladarse a superficies dispuestas en distinto plano. Se caracteriza por poseer dos módulos capaces de fijarse individualmente a la superficie, los cuales están unidos entre sí mediante un brazo que permite movimientos relativos entre ambos V que se componen, fundamentalmente, de dos partes, una campana de succión V una carcasa. La cámara de succión V la carcasa tienen la capacidad de poder girar una con respecto a la otra con respecto al eje de rotación coincidente con la perpendicular de la superficie de apoyo del módulo. Este giro se realiza mediante un motor-reductor alojado en la carcasa y que transmite el movimiento a la cámara de succión.
Además, cada módulo dispone de un motor-reductor que lleva acoplado una hélice que se mueve dentro de la cámara de succión. Controlando el sentido y la potencia de dicho motor-reductor, la hélice genera la fijación o la separación del módulo con respecto a la superficie.
Un brazo articulado une las carcasas de ambos módulos, permitiendo dos movimientos relativos de rotación entre el brazo articulado y cada módulo. El primero de dichos giros se realiza en el plano perpendicular al plano de apoyo del módulo en la superficie y coincidente con los centros geométricos de cada módulo, y, el otro, el giro sobre el eje que une ambas articulaciones.
Cada módulo puede estar dotado de varios sistemas de limpieza en función del tipo de tratamiento a realizar (cepillos, cuchillas, chorros a presión, etc.) así como de los sistemas de tratamiento de prevención de contaminación....
Reivindicaciones:
1. Sistema robótica para limpieza de una superficie sumergida que comprende dos módulos, una pluralidad de motores-reductores y una pluralidad de hélices y de útiles de limpieza, caracterizado por que comprende además un brazo articulado para unir ambos módulos, donde cada módulo comprende:
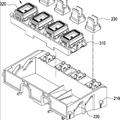
-una cámara inferior (1) y una carcasa superior (2) que alojan:
-un primer motor-reductor (6) acoplado a unos medios de succión-propulsión para fijar o separar dicho módulo de la superficie a limpiar,
-un segundo motor-reductor (6) con capacidad de girar relativamente el brazo articulado respecto del módulo,
-al menos un tercer motor-reductor (6) acoplado a una pluralidad de útiles de limpieza
(15) .
2. Sistema robótica según una cualquiera de las reivindicaciones, caracterizado por que los medios de succión-propulsión comprenden una hélice que, en función de la potencia y sentido de giro del primer motor-reductor (6L fija o separa dicho módulo de la superficie a limpiar.
3. Sistema robótica según una cualquiera de las reivindicaciones, caracterizado por que los medios de succión-propulsión comprenden una bomba.
4. Sistema robótica según una cualquiera de las reivindicaciones 2 o 3, caracterizado por que está configurado para desplazarse por la superficie a limpiar mediante la fijación y separación alternada de cada módulo producida por la modificación de la potencia del motor asociado a cada hélice.
5. Sistema robótica según una cualquiera de las reivindicaciones 2 a 4, caracterizado por que el segundo motor-reductor (6) está configurado para producir el giro relativo de la cámara superior y la carcasa inferior mediante unos engranajes que comprende una corona (3) y un tornillo sin fin (4) .
6. Sistema robótica según una cualquiera de las reivindicaciones 2 a 4, caracterizado por que el segundo motor-reductor (6) está configurado para producir el giro relativo de la cámara superior y la carcasa inferior mediante unas poleas movidas por una correa.
7. Sistema robótica según una cualquiera de las reivindicaciones anteriores, caracterizado por que el brazo articulado comprende un brazo rígido (12) que se ensambla a dos acoples (lOL en sus extremos, de manera que se permite el giro alrededor del eje longitudinal de dicho brazo, donde cada acople se une al bastidor superior (2) formando una articulación de tipo bisagra.
8. Sistema robótica según reivindicación 7, caracterizado por que las articulaciones del brazo de unión presentan una posición preferente mediante al empleo de una barra de torsión (13) que establece una posición de reposo predefinida cuando no existen fuerzas aplicadas sobre el robot.
9. Sistema robótica según reivindicación 7, caracterizado por que las articulaciones del brazo de unión se encuentran actuadas.
10. Sistema robótica según una cualquiera de las reivindicaciones anteriores, caracterizado por que los útiles de limpieza (15) comprenden un actuador para moverse.
11. Sistema robótico según una cualquiera de las reivindicaciones anteriores, caracterizado por que los útiles de limpieza (15) comprenden al menos una brocha (16) .
12. Sistema robótica según la reivindicación 10 u 11, caracterizado por que los útiles de limpieza (15) comprenden al menos una cuchilla (17) .
13. Sistema robótica según reivindicación 11 y 12, caracterizado por que las brochas y las cuchillas están situadas en una plataforma giratoria.
14. Sistema robótica según una cualquiera de las reivindicaciones anteriores, caracterizado por que los útiles de limpieza (15) incorporan al menos un chorro a presión.
15. Sistema robótica según una cualquiera de las reivindicaciones anteriores, caracterizado por que los útiles de limpieza (15) comprenden un sistema anticontaminante.
16. Sistema robótica según reivindicación 15, caracterizado por que el sistema anticontaminante contiene un filtro que retiene las partículas contaminantes removidas por el sistema de limpieza.
17. Sistema robótica según reivindicación 16, caracterizado por que el sistema anticontaminante contiene una segunda bomba.
18. Sistema robótico según una cualquiera de las reivindicaciones anteriores, caracterizado por que incorpora un sistema de inspección.
19. Sistema robótica según reivindicación 18, caracterizado por que el sistema de inspección contiene, en al menos uno de los módulos, al menos una cámara y su correspondiente iluminación.
20. Sistema robótica según reivindicación 18, caracterizado por que el sistema de inspección contiene sensores de ultrasonidos.
21. Sistema robótica según una cualquiera de las reivindicaciones 2 a 20, caracterizado por que está configurado para trabajar de manera telecontrolada.
22. Sistema robótica según una cualquiera de las reivindicaciones 2 a 21, caracterizado por que está configurado para trabajar de manera semi-autónoma.
s
Patentes similares o relacionadas:
SISTEMA DE MEJORA DE LA CALIDAD DEL AIRE EN EL ENTORNO DE LA PIZARRA MEDIANTE EXTRACCIÓN LOCALIZADA DEL AIRE CONTAMINADO, del 22 de Enero de 2020, de UNIVERSIDAD DE VALLADOLID: Sistema de mejora de la calidad del aire en el entorno de una pizarra mediante extracción localizada del aire contaminado que comprende […]
Dispositivo de limpieza de rodillos, del 22 de Enero de 2020, de KERAGLASS INDUSTRIES S.r.l: Dispositivo de limpieza de rodillos que comprende: un bastidor de soporte ; medios de limpieza soportados por dicho bastidor para poderse […]
Sistema de lavado de la carrocería de un vehículo y procedimiento asociado, del 8 de Enero de 2020, de ALSTOM Transport Technologies: Sistema de lavado de la carrocería de un vehículo , caracterizado porque comprende: - un dispositivo de dispersión de un líquido de lavado […]
Recipiente de limpieza para limpiar una rejilla de almacenamiento de un sistema de almacenamiento, del 11 de Diciembre de 2019, de Autostore Technology AS: Un recipiente de limpieza operado por un vehículo para limpiar una rejilla de almacenamiento de un sistema de almacenamiento, en […]
SISTEMA DE MEJORA DE LA CALIDAD DEL AIRE EN EL ENTORNO DE LA PIZARRA MEDIANTE EXTRACCIÓN LOCALIZADA DEL AIRE CONTAMINADO, del 5 de Diciembre de 2019, de UNIVERSIDAD DE VALLADOLID: Sistema de mejora de la calidad del aire en el entorno de una pizarra mediante extracción localizada del aire contaminado que comprende al […]
 Módulo de limpieza de boquillas, del 30 de Octubre de 2019, de XYZPRINTING INC: Un módulo de limpieza de boquillas para una impresora tridimensional del tipo de fusión por calor, que comprende:
un alojamiento de base ; […]
Módulo de limpieza de boquillas, del 30 de Octubre de 2019, de XYZPRINTING INC: Un módulo de limpieza de boquillas para una impresora tridimensional del tipo de fusión por calor, que comprende:
un alojamiento de base ; […]
Herramienta de limpieza de conector óptico y método de limpieza de un conector óptico, del 2 de Octubre de 2019, de FUJIKURA LTD.: Una herramienta de limpieza de conector óptico que comprende un cuerpo de herramienta que incluye una parte extendida que se extiende desde dicho […]
DISPOSITIVO PARA LIMPIEZA PARA PANELES CONCENTRADORES SOLARES, del 11 de Septiembre de 2019, de ECILIMP TERMOSOLAR, S.L: 1. Dispositivo para limpieza para paneles con concentradores solares, caracterizado porque incorpora un sistema de enganche para la unión del implemento de limpieza […]