SISTEMA DE CONTROL DE UN VEHICULO Y METODO DE OPERACION DEL MISMO.
Un sistema de control para un vehículo (100) que tiene múltiples ruedas (104),
en donde cada una de las ruedas (104) tienen un neumático montado en las mismas, en donde el sistema comprende:
un primer sensor (112) de la velocidad de la rueda asociado con la primera rueda (104), en donde el primer sensor de velocidad de la rueda (112) está configurado para generar una primera señal de velocidad de la rueda indicativa de una velocidad para la primera rueda (104);
un segundo sensor de la velocidad de la segunda rueda (112) asociado con la segunda rueda (104), en donde el sensor (112) de la velocidad de la segunda rueda está configurado para generar una señal de velocidad de la segunda rueda indicativa de una velocidad para la segunda rueda 104);
un primer sensor de presión (131) asociado con el primer neumático, en donde el primer sensor de presión (131) está configurado para generar una primera señal de presión indicativa de la presión de un neumático para el primer neumático;
un segundo sensor de presión (131) asociado con el segundo neumático, en donde el segundo sensor de presión (131) está configurado para generar una segunda señal de presión indicativa de una presión de un neumático para el segundo neumático;
caracterizado porque el sistema además comprende:
un primer procesador (212) configurado para recibir la primera y segunda señales de velocidad de las ruedas, y para generar una primera señal procesada cuando la primera y segunda señales de las ruedas indiquen que la velocidad de la primera rueda (104) es diferente de la velocidad de la segunda rueda (104);
un segundo procesador (216) configurado para recibir la primera y segunda señales de presión, y para generar una segunda señal procesada cuando la primera y segunda señales cuando la primera y segunda señales de presión indiquen que el primer neumático tiene una presión que es diferente de la presión del segundo neumático; y
un tercer procesador (220) configurado para recibir la primera y segunda señales procesadas, para generar una señal de reventón o pinchazo del neumático cuando ambas primera y segunda señales procesada hayan sido generadas, y para activar al menos un sistema de seguridad activa (228; 139A) y un sistema de seguridad pasiva (232; 139B) con la señal de reventón o pinchazo del neumático
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05024718.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: POSTFACH 300220 70442 STUTTGART, DE.
Inventor/es: WILLIAMS,KYLE,W.
Fecha de Publicación: .
Fecha Solicitud PCT: 11 de Noviembre de 2005.
Fecha Concesión Europea: 5 de Mayo de 2010.
Clasificación Internacional de Patentes:
- B60C23/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60C NEUMATICOS PARA VEHICULOS; INFLADO DE NEUMATICOS; CAMBIO DE NEUMATICOS; FIJACION DE VALVULAS A CUERPOS ELASTICOS INFLABLES, EN GENERAL; DISPOSITIVOS O INSTALACIONES CONCERNIENTES A LOS NEUMATICOS. › B60C 23/00 Dispositivos para medir, indicar, controlar o distribuir la presión o la temperatura de neumáticos, especialmente adaptados para ser montados sobre vehículos; Instalación sobre vehículos de dispositivos de inflado de neumáticos, p. ej. de bombas, de depósitos; Disposiciones para enfriar los neumáticos. › montados sobre la rueda o el neumático.
- B60C23/06A
- B60R21/013 B60 […] › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › B60R 21/00 Disposiciones o equipamientos sobre los vehículos para proteger a los ocupantes o a los peatones o para evitar ser dañados en caso de accidente o de otros riesgos de la circulación (cinturones o arneses de seguridad en los vehículos B60R 22/00; asientos construidos para proteger al ocupante de los efectos de las fuerzas de aceleración anormales, p. ej. asientos anticolisión o asientos de seguridad, B60N 2/42; disposiciones para absorber la energía en los volantes de dirección de vehículos B62D 1/11; disposiciones para absorber la energía en las columnas de dirección de vehículos B62D 1/19). › incluyendo medios para detectar colisiones, colisiones inminentes o un vuelco.
- B60W30/08 B60 […] › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Anticipación o prevención de colisiones probables o inminentes.
- B60W30/08D
Clasificación PCT:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Sistema de control de un vehículo y método de operación del mismo.
Antecedentes
La invención está relacionada con un sistema de control de un vehículo, y más particularmente con un sistema de control de un vehículo para la detección de un pinchazo o reventón de un neumático y para el control del vehículo en respuesta al pinchazo o reventón del neumático.
El documento US 5696681 describe un control dinámico de un vehículo en la dirección de los frenos, que comprende medidas para la detección de la rotura del neumático, basándose en la presión del neumático o en los datos de velocidad de las ruedas, determinando una trayectoria deseada y real en curso del vehículo, y generando señales de frenado para controlar la trayectoria en curso del vehículo. El documento DE 10210928 C1 expone como detectar una pérdida de la presión en un neumático para activar unos medios de seguridad asociados con un asiento del coche.
Sumario
En una forma, la invención proporciona un sistema de control para un vehículo que tiene múltiples ruedas. Cada una de las ruedas tiene un neumático. El sistema incluye un sensor de la velocidad asociado con cada rueda. Cada sensor de la velocidad de la rueda está configurado para generar una señal de la velocidad de la rueda, que indica una velocidad para su rueda respectiva. El sistema incluye también un sensor de presión asociado con cada neumático. Cada sensor de la presión está configurado para generar una señal de presión que indique una presión del neumático para su respectivo neumático. El sistema puede incluir también una pluralidad de procesadores. Por ejemplo, y en una construcción, el sistema incluye un primer procesador para recibir las señales de la velocidad de la rueda, y para generar una primera señal procesada, cuando una de las señales indique que una de las ruedas tiene una velocidad que es diferente con respecto a las velocidades de las demás ruedas. El sistema puede incorporar también un segundo procesador para recibir las señales de presión, y para generar una segunda señal procesada cuando una de las señales de presión indique que uno de los neumáticos tiene una presión que cambie bruscamente. El sistema puede incluir también un tercer procesador para recibir la primera y segunda señales procesadas, para generar una señal de pinchazo o reventón de un neumático, cuando ambas primera y segunda señales procesadas hayan sido generadas, y para activar al menos un sistema de seguridad activo o un sistema de seguridad pasivo con la señal del pinchazo o reventón.
En otra forma, la invención proporciona un método para controlar un vehículo que tenga múltiples ruedas con las características de la reivindicación 9.
Las demás características y ventajas de la invención llegarán a ser evidentes para los técnicos especializados de la técnica, con la revisión de la siguiente descripción detallada, incluyendo las reivindicaciones y los dibujos.
Breve descripción de los dibujos
En los dibujos:
la figura 1 muestra una vista en planta esquemática de un vehículo;
la figura 2 muestra un diagrama de bloques de un sistema de control en el vehículo de la figura 1; y
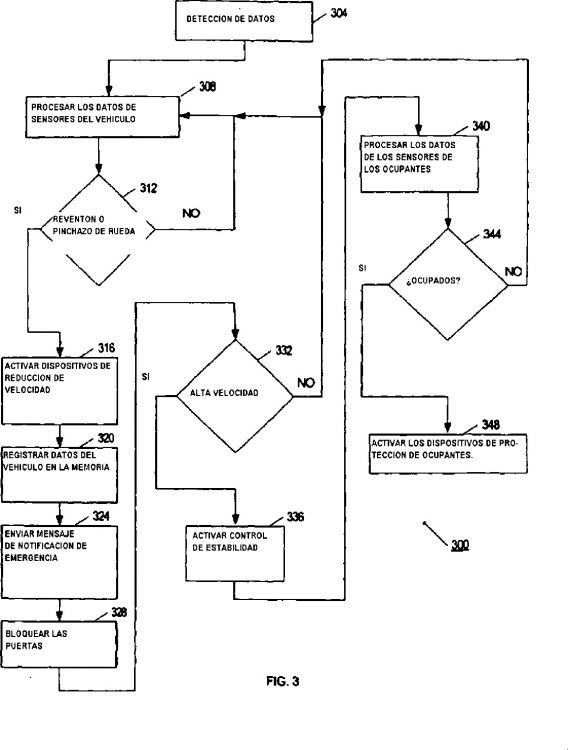
la figura 3 es un diagrama de flujo del procesamiento llevado a cabo en las realizaciones de la invención.
Antes de que se expliquen en detalle las realizaciones de la invención, se tiene que comprender que la invención no está limitada en su aplicación a los detalles de la construcción y a las configuraciones de los componentes expuestos en la siguiente descripción o ilustración en los siguientes dibujos.
Descripción detallada
La figura 1 muestra una vista en planta esquemática de un vehículo 100. El vehículo 100 tiene cuatro ruedas 104A, 104B, 104C y 104D. Las ruedas 104A, 104B, 104C y 104D están acopladas a dos ejes 108A y 108B, los cuales están conectados a un motor 110, tal como se indica. Las cuatro ruedas están monitorizadas por una pluralidad de sensores de la velocidad de las ruedas 112A, 112B, 112C, y 112C. Los sensores de la velocidad de las ruedas 112A, 112B, 112C, y 112C están acoplados a una unidad de procesamiento electrónico 116 ("ECU"). Cada una de las ruedas tienen también montado un neumático. El vehículo 100 puede incluir otros sensores tales como un sensor 120 del parachoques frontal, un sensor 124 del parachoques trasero, una pluralidad de sensores de impactos laterales 128, y una pluralidad de acelerómetros 130A y 130B. En algunas construcciones, el vehículo 100 incluye también una pluralidad de sensores de presión de los neumáticos 131A, 131B, 131C y 131D, un sensor 132 del ángulo del volante de dirección, un sensor 133 del ángulo de la rueda de rodadura, un sensor 134 del par motriz de dirección, y un sensor 135 de la presión de dirección. El vehículo 100 puede incluir también un sensor 136 de velocidad del motor, una pluralidad 137 de conmutadores/sensores de las hebillas del cinturón de seguridad, y una pluralidad de sensores 138 de detección de ocupantes. Aunque estos sensores se muestran en su totalidad en el vehículo 100, algunas construcciones del vehículo 100 pueden incluir más o menos sensores. Se prevé también que el vehículo pueda tener más o menos ruedas que las cuatro ruedas 104A, 104B, 104C y 104D mostradas.
Los sensores de velocidad de las ruedas 112A, 112B, 112C, y 112D, el sensor 120 del parachoques frontal, el sensor 124 del parachoques trasero, los sensores 128 de impacto lateral, los acelerómetros 130A y 130B, los sensores 137 de las hebillas de los cinturones de seguridad de los asientos, y los sensores 138 de detección de los ocupantes se muestran como sensores individuales. No obstante, estos sensores 112A, 112B, 112C, 112D, 120, 124, 128, 130A, 130B, 137 y 138 pueden combinarse y/o incluir múltiples sensores en una pluralidad de conjuntos de sensores acoplados a la ECU 116. Otros tipos de sensores tales como los sensores térmicos podrán ser utilizados también en el vehículo 100.
El vehículo 100 puede incluir también una pluralidad de controles de seguridad activa y pasiva 139A y 139B. Los controles de seguridad activa y pasiva 139A y 139B pueden ser utilizados para controlar la estabilidad del vehículo 100 o para activar una pluralidad de los dispositivos de estabilidad de los ocupantes. Tal como se muestra en la figura 1, el control 139A de control de seguridad activa incluye un control 139 de freno de antibloqueo, que controla una pluralidad de frenos 140A, 140B, 140C, y 140D. Se muestra también en la figura 1 que el control de seguridad pasiva incluye un control de dispositivo de retención que controla el despliegue de dispositivos de retención del vehículo 100, tal los airbag delanteros 144 y airbag laterales 148. Aunque la figura 1 muestra solo los dispositivos de retención de los airbag, otros tipos de dispositivos de retención, tales como los pretensores de los cinturones de los asientos y los airbag para la cabeza y el pecho podrán ser utilizados en el vehículo 100.
La unidad de procesamiento electrónico 116 recibe entradas de los sensores tales como los sensores de la velocidad de las ruedas 112A, 112B, 112C y 112D, el sensor del parachoques delantero 120, los sensores 128 de impacto lateral, los acelerómetros 130A y 130B, los sensores de la presión de los neumáticos 131A, 131B, 131C y 131D, el sensor 132 del ángulo del volante de dirección, el sensor 133 del ángulo de la rueda de rodadura, el sensor 134 del par motor de dirección, el sensor 135 de la presión de la dirección, el sensor 136 de la velocidad del motor, los sensores de las hebillas del cinturón de los asientos 137 y los sensores de detección de los ocupantes 138.
En una construcción, cada uno de los acelerómetros 130A y 130B detectan y monitorizan una condición del vehículo 100. Por ejemplo, los acelerómetros 130A y 130B se utilizan para detectar una condición del vehículo 100 que es indicativa de una magnitud de aceleración experimentada por el vehículo 100. En otras construcciones, los sensores 130A y 130B pueden detectar el movimiento del vehículo 100, y translucir y convertir las señales en otras señales indicativas de la aceleración del vehículo 100. Si los sensores 130A y 130B están equipados con circuitos de calibración o con microprocesadores, los movimientos pueden ser convertidos internamente en una forma calibrada. De lo contrario, las condiciones pueden ser convertidas en señales calibradas por otros procesos externos de la forma conocida en la técnica. Además de ello, otros sensores tales como el sensor 120 del parachoques delantero, el sensor 124 del parachoques...
Reivindicaciones:
1. Un sistema de control para un vehículo (100) que tiene múltiples ruedas (104), en donde cada una de las ruedas (104) tienen un neumático montado en las mismas, en donde el sistema comprende:
un primer sensor (112) de la velocidad de la rueda asociado con la primera rueda (104), en donde el primer sensor de velocidad de la rueda (112) está configurado para generar una primera señal de velocidad de la rueda indicativa de una velocidad para la primera rueda (104);
un segundo sensor de la velocidad de la segunda rueda (112) asociado con la segunda rueda (104), en donde el sensor (112) de la velocidad de la segunda rueda está configurado para generar una señal de velocidad de la segunda rueda indicativa de una velocidad para la segunda rueda 104);
un primer sensor de presión (131) asociado con el primer neumático, en donde el primer sensor de presión (131) está configurado para generar una primera señal de presión indicativa de la presión de un neumático para el primer neumático;
un segundo sensor de presión (131) asociado con el segundo neumático, en donde el segundo sensor de presión (131) está configurado para generar una segunda señal de presión indicativa de una presión de un neumático para el segundo neumático;
caracterizado porque el sistema además comprende:
un primer procesador (212) configurado para recibir la primera y segunda señales de velocidad de las ruedas, y para generar una primera señal procesada cuando la primera y segunda señales de las ruedas indiquen que la velocidad de la primera rueda (104) es diferente de la velocidad de la segunda rueda (104);
un segundo procesador (216) configurado para recibir la primera y segunda señales de presión, y para generar una segunda señal procesada cuando la primera y segunda señales cuando la primera y segunda señales de presión indiquen que el primer neumático tiene una presión que es diferente de la presión del segundo neumático; y
un tercer procesador (220) configurado para recibir la primera y segunda señales procesadas, para generar una señal de reventón o pinchazo del neumático cuando ambas primera y segunda señales procesada hayan sido generadas, y para activar al menos un sistema de seguridad activa (228; 139A) y un sistema de seguridad pasiva (232; 139B) con la señal de reventón o pinchazo del neumático.
2. El sistema de la reivindicación 1, que comprende además un sensor del ángulo (132; 133) configurado para generar una señal de ángulo indicativa de un ángulo de balanceo del vehículo y en donde el tercer procesador (220) está configurado además para recibir la señal del ángulo, y para determinar si se ha producido un reventón o pinchazo basándose en la señal de ángulo.
3. El sistema de la reivindicación 1, que comprende además un sensor de presión del volante de dirección (135) configurado para generar una señal de presión de la dirección indicativa de la presión aplicada a un volante de dirección, y en donde el tercer procesador (220) está configurado además para recibir una señal de presión de la dirección, y para determinar si ha tenido lugar un reventón o pinchazo del neumático basándose en la señal de presión de la dirección.
4. El sistema de la reivindicación 1, en donde el sistema de seguridad activa (228; 139A) comprende al menos un control de frenos antibloqueo (236), un control de estabilidad (252), un control de dirección (244), un control del acelerador (248), un control de frenado selectivo, y un control de la transmisión (240).
5. El sistema de la reivindicación 4, en donde el tercer procesador (220) activa al menos un control de frenado antibloqueo (236), el control de estabilidad (252), el control de dirección (244), el control del acelerador (248), el control de freno selectivo, y el control de la transmisión (240).
6. El sistema de la reivindicación 1, que comprende además un sensor de la tasa de guiñada (204) configurado para generar una señal de la tasa de guiñada indicativa de una tasa de guiñada del vehículo (100), y en donde el tercer procesador (220) está además configurado para recibir una señal de la tasa de guiñada y para determinar si ha tenido lugar un reventón o pinchazo en un neumático basándose en la señal de presión de la dirección.
7. El sistema de la reivindicación 1, que comprende además un sensor de aceleración lateral (208) configurado para generar una señal de aceleración lateral indicativa de una señal de aceleración lateral del vehículo (100), y en donde el tercer procesador (220) está configurado además para recibir la señal de aceleración lateral y para determinar si ha tenido lugar un reventón o pinchazo en el neumático basándose en la señal de aceleración lateral.
8. El sistema de la reivindicación 1, en donde el sistema de seguridad pasiva (232; 139B) comprende al menos un sistema de restricción (254) y un sistema electrónico de la carrocería (262).
9. Un método para controlar un vehículo (100) que tiene múltiples ruedas (104), en donde cada rueda tiene un neumático montado en la misma, en donde el método comprende:
determinar una velocidad de la rueda asociada con cada rueda;
determinar una presión del neumático asociada con cada neumático;
caracterizado porque el método comprende además:
generar una señal de reventón o pinchazo del neumático cuando:
10. El método de la reivindicación 9, que comprende además la determinación del ángulo de balanceo del vehículo, y en donde la generación de una señal de reventón o pinchazo del neumático está basada además en el ángulo.
11. El método de la reivindicación 9, que comprende además la determinación de una presión aplicada al volante de dirección del vehículo, y en donde la generación de una señal de reventón o pinchazo está basada en la presión del volante de dirección.
12. El método de la reivindicación 9, en donde el sistema de seguridad activa (228; 139A) comprende al menos un control de freno antibloqueo (236), un control de estabilidad (252), un control de dirección (244), un control del acelerador (248), un control de frenado selectivo, y un control de la transmisión (240).
13. El método de la reivindicación 12, que comprende además la activación al menos del control de frenado antibloqueo (236), el control de estabilidad (252), el control de dirección (244), el control del acelerador (248), el control del frenado selectivo, y el control de la transmisión (240).
14. El método de la reivindicación 9, que comprende además la recepción de datos de un sensor de la tasa de guiñada (204) configurado para medir una tasa de guiñada del vehículo (100), y en donde la generación de una señal de reventón o pinchazo del neumático está basada además en la tasa de guiñada del vehículo (100).
15. El método de la reivindicación 9, que comprende además la recepción de datos de un sensor (208) de aceleración lateral, configurado para medir una aceleración lateral del vehículo (100), y en donde la generación de una señal de reventón o pinchazo del neumático está basada además en la aceleración lateral.
16. El método de la reivindicación 9, en donde el sistema de seguridad pasiva (232; 139B) comprende al menos un sistema de restricción (254) y un sistema electrónico de la carrocería (262).
Patentes similares o relacionadas:
Sistema de lectura para sensores de vigilancia de vehículos de motor, del 1 de Julio de 2020, de Norauto France: Banco de lectura de al menos un dato de vigilancia configurado para acomodar al menos un vehículo que comprende al menos una rueda […]
Procedimiento para determinar la circunferencia de rueda de una rueda de accionamiento, procedimiento de control para un motor de accionamiento, dispositivo de control y vehículo, del 24 de Junio de 2020, de ROBERT BOSCH GMBH: Procedimiento para la determinación de una circunferencia de rueda (U) de una rueda de accionamiento de una bicicleta eléctrica ; en donde antes de un período […]
Dispositivo de medición y sistema de medición de presión que comprende un sensor de presión, del 22 de Abril de 2020, de Safran Electronics & Defense SAS: Dispositivo de medición de presión de un neumático de un vehículo que incluye: - un sensor que incluye una placa de circuito […]
Enlace en bucle de presión de neumático de aeronave, del 18 de Marzo de 2020, de Eldec Corporation: Un enlace en bucle de presión de neumático de aeronave para acoplar electromagnéticamente un campo magnético entre una bobina del transceptor electromagnético […]
Sistema inalámbrico de monitoreo de neumáticos, del 29 de Enero de 2020, de Salutica Allied Solutions Sdn. Bhd: Un sistema inalámbrico de monitoreo de neumáticos para un vehículo, el sistema inalámbrico de monitoreo de neumáticos (100a) incluye: […]
Procedimiento y sistema para determinar una desviación de presión entre una presión de neumático teórica y una presión de neumático actual para un neumático de un vehículo y para determinar la carga de una rueda, del 20 de Noviembre de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para determinar una desviación de presión (pRel) entre una presión de neumático teórica (pIdeal) y una presión de neumático actual (pActual) para un […]
Neumático de vehículo, procedimiento de equipamiento electrónico de este neumático de vehículo y procedimiento de utilización de los datos adquiridos del neumático de vehículo, del 5 de Junio de 2019, de CONTINENTAL REIFEN DEUTSCHLAND GMBH: Neumático de vehículo con una superficie de rodadura que presenta un perfil a lo largo de su superficie periférica y que hace […]
Etiqueta RFID con antena de caucho, elastómero o polímero, del 22 de Mayo de 2019, de COOPER TIRE & RUBBER COMPANY: Conjunto de dispositivo de identificación por radiofrecuencia para un producto que comprende: un sustrato de caucho, elastómero o polímero […]