Simulador exvivo para el aprendizaje, práctica y entrenamiento de técnicas endoscópicas.
Dispositivo de simulación exvivo para el desarrollo de habilidades prácticas en técnicas endoscópicas.
Este dispositivo está formado por un molde que contiene cavidades orgánicas para fijar órganos exvivo sobre los que realizar los ejercicios; con una cubierta superior que actúa a modo de sujeción y que contiene un dibujo donde se representa, de manera fiel, la anatomía visceral del paciente, y una base metálica que permite el empleo de energía térmica para ampliar el abanico de técnicas endoscópicas a entrenar.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201330987.
Solicitante: FUNDACIÓN CENTRO DE CIRUGIA JESÚS USÓN.
Nacionalidad solicitante: España.
Inventor/es: USON GARGALLO,JESUS, SORIA GALVEZ,FEDERICO, SÁNCHEZ MARGALLO,Francisco Miguel, MORCILLO MARTÍN,Esther.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G09B23/30 FISICA. › G09 ENSEÑANZA; CRIPTOGRAFIA; PRESENTACION; PUBLICIDAD; PRECINTOS. › G09B MATERIAL EDUCATIVO O DE DEMOSTRACION; MEDIOS DE ENSEÑANZA O DE COMUNICACION DESTINADOS A LOS CIEGOS, SORDOS O MUDOS; MODELOS; PLANETARIOS; GLOBOS; MAPAS GEOGRAFICOS; DIAGRAMAS. › G09B 23/00 Modelos para usos científicos, médicos o matemáticos, p. ej. dispositivos a escala real para la demostración (bajo forma de juguetes A63H). › Modelos anatómicos (articuladores dentales A61C 11/00).
Descripción:
de los dibujos
Para completar la descripción de la invención objeto de esta memoria técnica, mejorando la comprensión de sus características, se acompaña una hoja de diseños a dicha memoria, conforme a ejemplos preferentes de realización de la invención a modo ilustrativo y no limitativo.
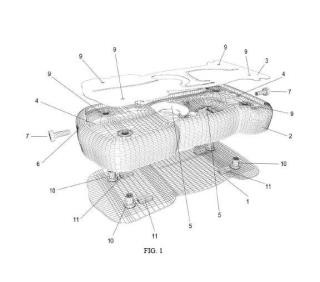
En la figura número 1 se muestra una imagen en perspectiva del simulador exvivo específico para el método de formación, despiezado en sus tres partes principales.
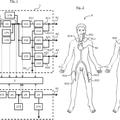
En la figura número 2 se expone otra vista en perspectiva del cuerpo del simulador, sin cubierta superior y sin base metálica, para reflejar la disposición interna del mismo.
En la figura número 3 se muestra un despiece lateral del simulador, incluyéndose en la base metálica los medios de sujeción y los elementos de anclaje de las partes principales.
Realización preferente de la invención
En base a los dibujos que acompañan a esta memoria técnica, seguidamente se detalla una forma de realización preferente de la invención, de forma no limitativa.
Debido a que el simulador va dirigido tanto a endoscopistas médicos como veterinarios, su diseño puede adaptarse a los estándares necesarios para la formación de unos u otros. Por un lado, con la forma, dimensión y anatomía de una persona de talla media, estando dirigido a médicos; o por otro, conforme a la anatomía y tamaño de un perro Beagle de tamaño medio, estando orientado al entrenamiento de endoscopistas veterinarios. El simulador tendrá, en ambos casos, la misma fundamentación técnica, pero con diferente apariencia externa.
Ambos simuladores estarán compuestos por tres partes principales: la base metálica (1), el cuerpo del simulador (2) y la cubierta superior (3).
La base metálica (1) consiste en una placa de material metálico conductor, de extensión y forma idénticas a las del cuerpo del simulador (2), cuya función es actuar como plano de tierra para cerrar el circuito eléctrico, permitiendo así el empleo de energía térmica durante la realización de determinados ejercicios endoscópicos (energía monopolar o plasma argón). El grosor de la misma debe ser suficiente para garantizar una adecuada conducción de la energía empleada durante el procedimiento.
En la base metálica (1), el simulador incluye unos medios de sujeción (11) al puesto de trabajo, para evitar su desplazamiento durante la realización de los ejercicios endoscópicos, por ejemplo, mediante un sistema de pestañas y correas.
Por su parte, el cuerpo del simulador (2) consiste en una estructura de material plástico, o cualquier otro material que aporte rigidez al simulador, y que conforma el cuerpo o soporte del mismo. Su forma externa, así como sus dimensiones son idénticas a las de un paciente real de tamaño medio, desde la cavidad oral hasta el orificio anal.
Por el interior del cuerpo del simulador (2) discurren una serie de cavidades (4) sobre las que se depositan los paquetes de órganos exvivo para realizar el entrenamiento. La forma y dimensión de estas cavidades se corresponden con las que se encontrarían en un paciente real de tamaño medio. Dichas cavidades (4) permiten que los órganos contacten con la base metálica (1) en varios puntos de conexión (5) para garantizar el cierre del circuito eléctrico cuando se emplee energía térmica.
Para introducir el endoscopio desde el exterior del simulador hasta el lumen de los órganos exvivo, el cuerpo del simulador posee unos orificios (6), situados en la cara frontal (que simula la cavidad oral y se emplea cuando la endoscopia se realiza sobre el tracto digestivo superior o el tracto respiratorio) y en la cara trasera (para la introducción del endoscopio cuando se efectúen exploraciones del tracto digestivo inferior o del tracto urinario).
En cada uno de estos orificios (6) se coloca un conector (7) que comunica el exterior del simulador con el interior del órgano exvivo. Dicho conector (7) consiste en un tubo de material rígido de diámetro mayor al del endoscopio a emplear. El extremo exterior del conector (7) posee un sistema que evita el escape del aire insuflado durante los ejercicios endoscópicos, el cual puede consistir, por ejemplo, en una válvula anti-escape, una goma elástica con orificio central o cualquier otro mecanismo que impida el retroceso del aire/líquido insuflado/instilado. Por otra parte, el extremo interno del conector sirve de anclaje al órgano exvivo. Dicho anclaje debe garantizar una fijación adecuada del conector al órgano, que impida que se desacople durante las prácticas y que garantice un cierre hermético para que no se produzcan pérdidas del aire/líquido en esta sección de unión. Este anclaje se puede conseguir mediante cualquier sistema de unión, por ejemplo, introduciendo el conector por el lumen del órgano y fijándolo con una brida externa.
El cuerpo del simulador (2), también, posee una hendidura (8) a través de la cual es posible colocar una placa neutra para la dispersión de la energía empleada durante la realización de determinados ejercicios endoscópicos. La placa neutra contacta directamente tanto con parte del órgano exvivo, como con la base metálica (1).
Los puntos de conexión (5) en las cavidades (4), las base metálica (1) y la hendidura (8), forman parte de un circuito eléctrico configurado en el interior del cuerpo del
simulador (2), cuya función es facilitar el uso del instrumental eléctrico que es necesario en la realización de determinadas técnicas endoscópicas y, por tanto, también lo es para la simulación y entrenamiento en las mismas.
La tercera parte principal del dispositivo de simulación es la cubierta superior (3) constituida por una lámina con forma y dimensión idénticas a las del cuerpo del simulador (2), construida con un material rígido y de fácil limpieza, como el plástico o el aluminio.
Sobre esta cubierta (3) se encuentra impreso un dibujo en el que se representa de manera fiel la anatomía visceral de las cavidades torácica, abdominal y pelviana del paciente, ya sea humana o veterinaria, según la finalidad del método formativo. Los tramos correspondientes a las cavidades (4) orgánicas sobre las que se está entrenando se encuentran recortados para ver a través suyo el órgano exvivo y los movimientos del endoscopio durante la realización de los diferentes ejercicios.
Las tres piezas principales que conforman el simulador están unidas por unos elementos de anclaje que garantizan la adecuada fijación durante los ejercicios endoscópicos; pero a su vez son fácilmente desmontables para su limpieza y almacenaje.
En el ejemplo presentado en los diseños, la unión entre el cuerpo del simulador (2) a la base metálica (1) del mismo, se consigue mediante varias uniones machihembradas (10), que aseguran la fijación requerida. Sin embargo, la unión entre la cubierta superior (3) y el cuerpo del simulador (2) debe permitir un desmontaje rápido, para el intercambio de los órganos durante los ejercicios de entrenamiento; pero a su vez debe aportar la firmeza suficiente, que evite el desplazamiento de las visceras por la insuflación de aire, la instilación de líquido o la manipulación brusca. Algunos mecanismos que aportan las características deseadas pueden ser el sistema de cierre con pestañas, bisagra o imanes (9). Este último caso, es el representado en los diseños.
Por otro lado, para permitir que los órganos exvivo se dispongan y queden fijados en el interior del simulador como lo harían en un paciente real, el dispositivo de simulación, también, dispone de un sistema de inmovilización de los órganos. Este sistema está compuesto por diversos elementos que se han descrito anteriormente:
a) El cuerpo del simulador (2) posee una serie de cavidades (4), que poseen la forma y dimensión de un tracto orgánico de un paciente real de tamaño medio: digestivo, respiratorio, urinario o reproductor, según corresponda. Sobre estas cavidades se coloca el paquete orgánico completo, el cual permanecerá en la posición anatómica real, debido a que las cavidades actúan a modo de contenedor evitando su desplazamiento.
b) La cubierta superior (3) limita el movimiento que podrían experimentar las vísceras durante la realización de las maniobras endoscópicas.
c) El extremo interno de los conectores (7) colocados en cada uno de los orificios (6) del cuerpo del simulador (2) proporcionan otro punto de fijación o anclaje del paquete orgánico al simulador.
Para terminar esta descripción, hay que señalar que las dimensiones del simulador han sido realizadas en base a un estudio anatomomorfológico del paciente, por lo que los ejercicios realizados representan de manera fiel la realidad del procedimiento.
Reivindicaciones:
1. Simulador exvivo para el aprendizaje, práctica y entrenamiento de técnicas endoscópicas caracterizado por comprender una base metálica (1), el cuerpo del simulador (2) y la cubierta superior (3) con la misma forma y dimensiones que la estructura anatomo-morfológica de un cuerpo humano o animal.
2. Simulador exvivo para el aprendizaje, práctica y entrenamiento de técnicas endoscópicas, según la reivindicación 1, caracterizado porque lleva integrado un circuito eléctrico, usado en la realización de determinados ejercicios que requieren energía térmica, con una hendidura (8), a través de la cual, se inserta una placa neutra en contacto, tanto con parte del órgano exvivo, como con la base metálica (1), provocando la dispersión de dicha energía térmica.
3. Simulador exvivo para el aprendizaje, práctica y entrenamiento de técnicas endoscópicas, según la reivindicaciones anteriores, caracterizado porque, en el interior del cuerpo del simulador (2), contiene unas cavidades (4) en las que introducir órganos exvivo donde practicar cada una de las técnicas endoscópicas; cavidades donde los órganos contactan con la base metálica (1) en varios puntos de conexión (5), cerrando el circuito eléctrico.
4. Simulador exvivo para el aprendizaje, práctica y entrenamiento de técnicas endoscópicas, según la reivindicación 1, caracterizado por tener integrado un sistema de inmovilización de los órganos exvivo, formado por diferentes elementos situados en su interior, y que, junto a su forma exterior, permiten la adopción de la posición decúbito dentro de la representación de técnicas endoscópicas en medicina.
Patentes similares o relacionadas:
Simulador de técnica, del 8 de Julio de 2020, de TERUMO KABUSHIKI KAISHA: Un simulador de técnica para entrenar a un usuario a introducir un dispositivo médico en una arteria radial de un cuerpo humano, comprendiendo el simulador de técnica […]
ELEMENTO TATUABLE PARA PARA ORNAMENTAR OBJETOS DE MODA O DECORACIÓN Y EXTREMIDADES HUMANAS, del 18 de Junio de 2020, de DRAMMEH MORA, Eddi: Elemento tatuadle para ornamentar objetos de moda o decoración y las extremidades del cuerpo humano, que comprende una capa de polímero apta para ser tatuadle […]
SISTEMA DE ESTABILIZACIÓN DE MICROBIOTA INTESTINAL HUMANA, del 27 de Febrero de 2020, de CENTRO DE INVESTIGACIÓN Y ASISTENCIA EN TECNOLOGÍA Y DISEÑO DEL ESTADO DE JALISCO A.C: La presente invención concierne a un sistema integrado por composiciones y métodos para la obtención, estabilización y aplicación de un modelo ex vivo de microbiota gatrointestinal, […]
 Simulador médico-quirúrgico y procedimiento de simulación médico-quirúrgica, del 26 de Febrero de 2020, de CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE: Simulador médico-quirúrgico que comprende:
- un dispositivo de vascularización establecido para vascularizar un circuito cardiovascular, comprendiendo […]
Simulador médico-quirúrgico y procedimiento de simulación médico-quirúrgica, del 26 de Febrero de 2020, de CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE: Simulador médico-quirúrgico que comprende:
- un dispositivo de vascularización establecido para vascularizar un circuito cardiovascular, comprendiendo […]
Sistemas, aparatos y procedimientos para simuladores de pacientes, del 19 de Febrero de 2020, de BOARD OF REGENTS THE UNIVERSITY OF TEXAS SYSTEM: Un simulador abdominal que comprende: un alojamiento que simula al menos el abdomen de un paciente, comprendiendo el alojamiento: una capa […]
QL BLOCK TRAINER - SIMULADOR PARA BLOQUEO ECOGUÍADO DEL PLANO MUSCULAR CUADRADO LUMBAR, del 13 de Febrero de 2020, de MEDICAL PHANTOM SAS: La invención pertenece al campo de la física aplicada a tecnología médica relacionada con un simulador para aplicación de anestesia por bloqueo selectivo de una […]
CUBE I BLOCK TRAINER - SIMULADOR DE BLOQUEO ANESTÉSICO DEL PLEXO BRAQUIAL EN SUS CUATRO ABORDAJES, del 13 de Febrero de 2020, de MEDICAL PHANTOM SAS: La invención pertenece al campo de la física y propone un simulador compacto de forma cúbica para bloqueo anestésico del plexo braquial en sus cuatro abordajes, […]
PROCEDIMIENTO PARA LA REALIZACIÓN DE UNA ATLAS ANATÓMICO TRIDIMENSIONAL, del 16 de Enero de 2020, de RUESGA DELGADO,OSCAR: Procedimiento para la realización de un atlas anatómico tridimensional basado en el de corte sucesivo mediante laser del cuerpo criogenizado y posterior fotografiado […]