SENSOR DE POSICIÓN EN TRIANGULACIÓN MAGNÉTICA.
La presente invención se refiere a un sensor de posición basado en triangulación magnética,
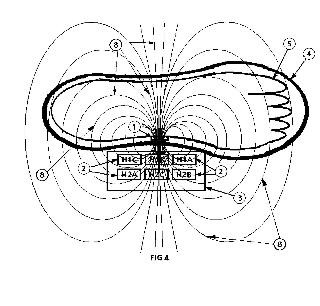
aplicable a la determinación de la posición relativa de un objeto o de una parte del cuerpo humano, en particular oculta o no visible total o parcialmente, con respecto al objeto o cuerpo que la oculta, y se basa en un conjunto formado por uno o varios imanes (1) que se fijan en la parte a analizar, (5) pie, cabeza, mano, tronco, o cualquier objeto y preferentemente tres o más sensores de campo magnético (2), que se sitúan en un soporte (3) que se fija en el objeto de modo que al situarlo dentro del espacio de influencia del campo magnético (8) del imán (1), van a generar una señal proporcional al campo magnético presente en esa zona, de modo que para cada posición relativa del imán (1) respecto al soporte de los sensores (3), los sensores (2) van a generar una señal característica correspondiente a esa posición de modo que mediante el algoritmo matemático adecuado, es posible establecer una relación entre la posición relativa del imán (1) respecto al soporte de los sensores (3) y, con ello, la posición relativa del objeto o parte del cuerpo (5 ó 10) con respecto a otro objeto (4 ó 9).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201000095.
Solicitante: INESCOP INSTITUTO TECNOLOGICO DE CALZADO Y CONEXAS.
Nacionalidad solicitante: España.
Inventor/es: POVEDA VERDU,DAMIAN, ORGILES BARCELO,CESAR, MOREV KLAPSING,Gaspar, ARREGUI DE JUAN-GUTIÉRREZ,Jesús.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A43D1/02 NECESIDADES CORRIENTES DE LA VIDA. › A43 CALZADOS. › A43D MAQUINAS, HERRAMIENTAS, EQUIPOS O PROCEDIMIENTOS PARA LA FABRICACION O LA REPARACION DEL CALZADO (costura D05B). › A43D 1/00 Dispositivos de medida del pie o de las hormas; Dispositivos de medida para partes del calzado. › Dispositivos de medida del pie (medida de la forma, del dibujo o de la dimensión del cuerpo con fines de diagnóstico A61B 5/103, p. ej. medida de dimensiones corporales A61B 5/107).
- A61B5/103 A […] › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 5/00 Medidas encaminadas a establecer un diagnóstico (diagnóstico por medio de radiaciones A61B 6/00; diagnóstico por ondas ultrasónicas, sónicas o infrasónicas A61B 8/00 ); Identificación de individuos. › Dispositivos de medida para evaluar la forma, la configuración, el tamaño o el movimiento del cuerpo o de sus partes, con fines de diagnóstico (A61B 5/08 tiene prioridad; instrumentos de medida especialmente concebidos para la técnica dental A61C 19/04).
- G01D5/12 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que utilizan medios eléctricos o magnéticos (G01D 5/06 tiene prioridad).
Fragmento de la descripción:
química del imán y de la potencia magnética que este pueda proporcionar, siendo especialmente complejo establecer una relación unívoca entre la posición relativa imán-sensores y la huella magnética. En todas las patentes analizadas no se describe la linealización mediante el uso de una tabla de correspondencia entre las señales eléctricas proporcionales al campo magnético y la posición relativa del imán o imanes respecto a los sensores. Esto también representa una importante novedad que aporta la presente invención, al establecerse una relación de correspondencia unívoca entre la huella magnética captada por los sensores y la posición del imán, es decir, que para cada posición corresponde una huella magnética definida por las señales de los sensores de campo magnético.
DESCRIPCIÓN DE LA INVENCIÓN
El sensor de posición basado en triangulación magnética que la presente invención propone, aplicable a la determinación de la posición relativa de un objeto o parte del cuerpo humano o de un animal, respecto a otro objeto que lo oculta total o parcialmente, o de un objeto cualquiera respecto a otro que lo oculta total o parcialmente, se basa en un conjunto formado por uno o varios imanes ( 1) que se fijan en la parte a anal izar, ( 5) pie, cabeza ( 1 0) , mano, tronco, o cualquier objeto, y preferentemente tres o más sensores de campo magnético (2) , que se sitúan en un soporte (3) que se fija en el objeto (4) de modo que al situarlo dentro del espacio de influencia del campo magnético (8) del imán (1 ) , van a generar una señal proporcional al campo magnético (8) presente en esa zona, de modo que para cada posición relativa del imán respecto al soporte de los sensores (3) , los sensores (3) van a generar una señal característica correspondiente a esa posición de modo que mediante el algoritmo matemático adecuado, es posible establecer una relación entre la posición relativa del imán (1) respecto al soporte de los sensores (3)
Los sensores de campo magnético (2) pueden estar situados en un mismo plano (H1A, H1 B, H1 C o en diferentes planos (H2A, H2B, H2C) ,
El sensor de posición consta por tanto de los siguientes elementos:
- Imán (1) fabricado con cualquiera de las tecnologías habituales, se sitúa en la zona o punto del que se quiere conocer la posición. Puede constar de uno o varios imanes.
- Sensores de campo magnético (2) , proporcionan una señal eléctrica proporcional al campo magnético (8) presente en la zona donde están situados. Pueden ser de diferentes tecnologías y preferentemente debe haber 3 o más sensores, pero el número es variable y en casos determinados puede ser suficiente con uno.
- Soporte de sensores magnéticos (3) , en el que se sitúan los sensores (2) a distancias determinadas
-Control electrónico (6) , que se encarga de realizar la gestión de las señales
proporcionadas por los sensores de campo magnético, acondicionado, filtrado, conversión A/D, proporcionando las señales en el formato adecuado...
Reivindicaciones:
l. Sensor de posición basado en triangulación magnética aplicable a la determinación de la posición relativa de un objeto o de una parte del cuerpo humano o animal, en particular oculta o no visible, total o parcialmente, con respecto al objeto o cuerpo que la oculta, mediante la detección con sensores del campo magnético generado por un imán o conjunto de imanes que se sujetan al objeto, caracterizado porque consiste en un dispositivo que consta de uno o más imanes (1 ) ; de al menos tres o más sensores
(2) de campo magnético; de un soporte de sensores (3) ; de una unidad de control electrónico (6) y de una unidad de procesado (7) , y que mide el nivel de campo magnético (8) en cada sensor (2) con medios electrónicos mediante una tabla de valores en la que se establece una correspondencia univoca entre las señales de campo magnético y la posición del imán se determina la posición relativa del imán (1) situado en el objeto o parte (5) respecto al objeto (4) en el que se ha situado el soporte de los sensores (3) , quedando definida cada posición por la huella magnética asociada, partiendo de la tabla de correspondencia entre las señales magnéticas detectadas por los sensores de campo magnético y la posición relativa del imán respecto a la posición de los sensores para la determinación de la posición mediante la unidad de procesado de señales (?) .
2. Sensor de posición basado en triangulación magnética, según la primera reivindicación, caracterizado porque el imán o imanes (1) se fijan al objeto (5) cuya posición relativa con respecto a otro objeto (4) se quiere conocer, de forma solidaria por medio de fijado que asegure la solidaridad de los movimientos del imán (1) y del objeto (5) .
3. Sensor de posición basado en triangulación magnética , según la primera reivindicación, caracterizado porque la unidad de control electrónico (6) realiza la gestión de las señales proporcionadas por los sensores de campo magnético (2}, el acondicionado, filtrado, conversión analogico digital, proporcionando las señales en formato digital a la unidad de procesado (7) que está dotada de medios de transmisión de los datos captados siendo estos cables o sistemas o dispositivos de transmisión de señales inalámbricos, bien por radiofrecuencia o mediante sistemas optoelectrónicos.
4. Sensor de posición basado en triangulación magnética, según la primera reivindicación, caracterizado porque la unidad de procesado (7) consta de un conjunto de circuitos electrónicos, que procesa las señales del control electrónico, y proporciona una señal que es la posición del imán (1) con respecto al soporte de sensores (3) y traduce dicha posición permitiendo visualizar gráficamente la posición del objeto oculto ( 5) o ( 1 O) respecto al objeto o cuerpo opaco que lo oculta ( 4) o (9) .
5. Sensor de posición basado en triangulación magnética, según la primera reivindicación, caracterizado porque el sensor o sensores de campo magnético (2) pueden ser uniaxiales o multiaxiales teniendo sensibilidad a campos magnéticos en una dirección o múltiples direcciones y están basados tecnología electromagnética magnetoresistiva.
• 1 ¡jl;l·, .
Patentes similares o relacionadas:
DISPOSITIVO DE CONTROL DE CARGA ACOPLABLE A MULETAS Y/O BASTONES PARA LA REHABILITACION DE LA MARCHA EN PACIENTES, del 23 de Julio de 2020, de Fundación Instituto de Estudios Ciencias de la Salud de Castilla y León (IECSCYL-IBSAL): 1. Dispositivo para el control de carga acoplable a muletas y/o bastones, caracterizado porque comprende: una barra con un extremo superior cilíndrico configurado para […]
SÍSTEMA Y MÉTODO PARA EL TRATAMIENTO DE ADICCIONES DE UN INDIVIDUO QUE LO NECESITE, CON BAJAS TASAS DE RELAPSO, del 2 de Julio de 2020, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: La invención corresponde a un sistema, más particularmente a un sistema NFB, y método, que permite el tratamiento de adicciones en las que está […]
DISPOSITIVO PARA EVITAR EPISODIOS DE APNEA EN INFANTES, del 11 de Junio de 2020, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: Dispositivo para evitar episodios de apnea en infantes, que simula un patrón de respiración adecuado para sincronizar la respiración del infante y que […]
Dispositivo de termoterapia con función de escaneo corporal y método para escanear el cuerpo usando el mismo, del 3 de Junio de 2020, de Ceragem Co., Ltd: Un dispositivo de termoterapia con función de escaneado del cuerpo humano donde una unidad termocerámica está configurada para moverse en dirección longitudinal […]
Método para proporcionar asesoramiento cosmético, del 13 de Mayo de 2020, de L'OREAL: 1. Metodo cosmetico en el que: a) se adquiere un color a partir de una region del cuerpo de un individuo usando un dispositivo equipado con una camara de […]
Procedimiento y dispositivo de control de estímulos, del 25 de Marzo de 2020, de IDMED: Procedimiento de control de estímulos aplicados a un sujeto animal o humano, en el que se utiliza un pupilómetro que incluye una unidad de generación de […]
Ayuda a la evaluación y diagnóstico de una patología de la articulación de la rodilla, del 18 de Marzo de 2020, de Emovi Inc: Medio no transitorio legible mediante ordenador que almacena instrucciones para implementar un procesador para identificar un problema […]
Sistema y procedimiento para aplicar un agente modificador de reflectancia para mejorar el atractivo visual de la piel humana, del 4 de Marzo de 2020, de TCMS Transparent Beauty LLC: Un sistema controlado por ordenador que determina los atributos de un área de la piel humana y aplica un agente modificador de reflectancia a nivel de píxel, en […]