Robot submarino modular.
Robot submarino modular.
La presente invención trata de un robot submarino modular con una pluralidad de brazos que es transformable en ROV para trabajos en fondos marinos y en construcciones marinas,
es un robot con brazos de morfología humanoide que se corresponde con las proporciones cinemáticas de un humano para realizar trabajos y/o para desplazarse y trepar haciendo uso de sus extremidades.
El objeto de la invención es proporcionar un único dispositivo o robot modular escalable en la cantidad de brazos robóticos que puede combinar funcionalidades de navegación, manipulación y desplazamiento en cualquier dirección gracias a la configuración de sus brazos robóticos e impulsores marinos.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201431539.
Solicitante: UNIVERSIDAD POLITECNICA DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: ARACIL SANTONJA, RAFAEL, EJARQUE RINALDINI,Gonzalo, SALTAREN PAZMIÑO,Roque, POLETTI,Gabriel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J11/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores no previstos en otro lugar.
- B63C11/48 B […] › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63C BOTADURA, VARADO, O PUESTA EN DIQUE SECO DE BUQUES; SALVAMENTO EN LA MAR; EQUIPOS PARA PERMANECER O TRABAJAR BAJO EL AGUA; MEDIOS DE LOCALIZACION O RECUPERACION DE OBJETOS SUMERGIDOS (redes flotantes, rampas de amerizaje flotantes o dispositivos similares para la recuperación de aviones del agua B63B 35/52). › B63C 11/00 Equipo para permanecer o trabajar bajo el agua; Medios para buscar objetos sumergidos (composiciones químicas para utilizarlas en aparatos de respiración A62D 9/00; accesorios o equipos para la natación A63B 31/00 - A63B 35/00; submarinos B63G 8/00). › Medios para buscar objetos sumergidos (medios para señalizar el emplazamiento de objetos hundidos B63C 7/26; aparatos de sondeo sónico G01S).
- B63G8/00 B63 […] › B63G INSTALACIONES OFENSIVAS Y DEFENSIVAS EN LOS BUQUES; COLOCACION DE MINAS; DRAGADO DE MINAS; SUBMARINOS; PORTAAVIONES (medios de ataque o de defensa en general, p. ej. torretas, F41H). › Embarcaciones sumergibles, p. ej. submarinos (cascos de submarinos B63B 3/13; cámaras de buceo unidas mecánicamente a una base, p. ej. mediante un cable B63C 11/34; artefactos automotores de buceo B63C 11/46; torpedos F42B 19/00).
- B63G8/08 B63G […] › B63G 8/00 Embarcaciones sumergibles, p. ej. submarinos (cascos de submarinos B63B 3/13; cámaras de buceo unidas mecánicamente a una base, p. ej. mediante un cable B63C 11/34; artefactos automotores de buceo B63C 11/46; torpedos F42B 19/00). › Propulsión (propulsión nuclear B63H 21/18; dispositivos de escape bajo el agua F01N 13/12; instalaciones o conjuntos de propulsión en sí , ver las clases correspondientes).
Fragmento de la descripción:
Robot submarino modular.
OBJETO DE LA INVENCIÓN 5
La presente invención trata de un robot submarino modular, con una pluralidad de brazos que es transformable en ROV para trabajos en fondos marinos y en construcciones marinas. El robot tiene brazos de morfología humanoide, correspondiéndose con las proporciones cinemáticas de un humano para realizar trabajos y/o para desplazarse y trepar haciendo uso de 10 sus extremidades.
El objeto de la invención es proporcionar un único dispositivo o robot modular escalable en la cantidad de brazos robóticos, pudiendo que puede combinar funcionalidades de navegación, manipulación y desplazamiento en cualquier dirección gracias a la configuración de sus brazos 15 robóticos e impulsores marinos.
ANTECEDENTES DE LA INVENCIÓN
Los trabajos que deben realizarse sobre estructuras bajo agua como cascos de barcos, 20 estructuras de plataformas petrolíferas, recipientes nucleares, bases de construcciones civiles como puertos, columnas de puentes, presas, o fondos marinos en general, requieren de dispositivos que se puedan desplazar apoyándose sobre la superficie de trabajo.
Existe una importante diferencia en las características técnicas de los trabajos en entornos 25 submarinos.
Por una parte están los trabajos submarinos que implican navegar impulsándose en el agua, por ejemplo en trabajos de exploración, toma de muestras, trabajos mecánicos en entornos relativamente diáfanos, etc. Frecuentemente caracterizados por obstáculos laterales o porque 30 se realizan a distancia o puntualmente sobre un entorno concreto de una superficie; en todos estos casos se utilizan vehículos tipo ROV. Los cuales a menudo pueden portar brazos mecánicos y herramientas de trabajo. Los movimientos de estos vehículos están caracterizados por un alto grado de dificultad en las maniobras de navegación, en especial las de manipulación, por estar implicados varios factores como son las perturbaciones causadas 35 por las corrientes marinas, colisiones con salientes de obstáculos, etc. En cualquier caso los vehículos tipo ROV no son aptos para desplazarse ni trepar a lo largo de una superficie inmersa, incluso a una distancia corta de ella, los salientes pueden obstaculizar su correcto funcionamiento, afectando la estabilidad de la navegación y pudiendo causar bloqueo del vehículo o serios daños mecánicos por colisiones. 40
Por otra parte están los trabajos que deben realizarse sobre superficies de cuerpos sumergidos o instalaciones submarinas. A menudo, estos trabajos deben realizarse a lo largo de la superficie en cuestión. En estos casos es necesario que el vehículo se desplace, vinculado por una serie de extremidades a la superficie de trabajo, con el fin de caminar, reptar o deslizarse 45 sobre la misma. Estos requisitos funcionales tienen una implicación sobre la arquitectura del vehículo o dispositivo que debe realizar este tipo de trabajos. En esencia se trataría de un dispositivo con varias extremidades que se apoyarían sobre la superficie con capacidad de sujetarse, para dar estabilidad al desplazamiento y al trabajo que se debe realizar.
En la técnica actual no existe un dispositivo submarino que reúna las características de navegar-manipular-caminar.
Un estudio del estado de la técnica indica que los robots que navegan desarrollados para trabajos en entornos submarinos, son conocidos en el estado de la técnica como ROV. Los vehículos submarinos, también llamados robots ROV (notación anglosajona para Remotely Operated Vehicle) se diferencian de otros tipos de dispositivos submarinos porque están conectados con su centro de control mediante un cable umbilical, a través del cual se le suministra potencia y se establecen las comunicaciones bidireccionales de datos de control y 5 monitorización de la actividad.
Existen patentes de vehículos submarinos que estan relacionados con ROVs, pudiendo destacar la patente US2012210926 (A1) , que presenta un ROV típico basado en su alimentación por cordón umbilical y múltiples impulsores en los ejes coordenados. Tomando 10 este caso, hay una serie de patentes que presentan robots submarinos de semejantes morfologías, pero nunca como robots que se pueden transformar como ROVs o robots con brazos duales humanoides. En general y en consecuencia, ninguna patente refleja la invención de un robot ROV que se puede transformar en un robot con brazos duales humanoides.
De otra parte, está en pleno desarrollo comercial una nueva generacion de robots con brazos duales, que tiene morfologia humanoide y que se empiezan a aplicar en labores complejas como ensamblado, clasificación, embalaje o en labores domésticas. Uno de los avances más esperados para una nueva generación de robots es el aumento en su capacidad de hacer más tareas que hacen los seres humanos. De hecho, varios fabricantes están desarrollando robots 20 comerciales con brazos duales que se preparan para tener un rendimiento similar al de los trabajadores humanos, varias empresas lo están haciendo, por ejemplo, empresas como: ABB, COMAU, Nachi, Motoman, Epson, Kuka, Rethink Robotics, por ejemplo vease la patente D0655324 (USD655324 S1) de la empresa ABB, o desarrollos industriales como el de la firma MOTOMAN (
http://www.zycon.com/News-Press-Releases/Read/Motoman-Dual-Arm-SDA-
25Robots-Provide-Human-Like-Flexibility-R827.html
) .En la literatura se han propuesto robots submarinos con brazos dobles (
http://www.j-mst.org/On_line/admin/files/08-04097_887-894_.pdf
) , en la misma línea el robot de morfología humanoide del profesor Oussama Khatib de la Universidad de Stanford (http://www.redsearobotics.net/
) pero ninguno de estos robots se desarrollan en el sentido de 30 modularidad, morfología humanoide y tipo de trabajos submarinos como el que se propone en esta invención.Sin lugar a dudas los robots con brazos duales están aquí para quedarse, básicamente para sustituir a los operadores humanos en labores de manipulación, incluso en trabajos delicados 35 de manipulación. Las tareas de manipulación involucran un proceso complejo, caracterizado por las fuerzas de contacto no lineales con comportamientos dinámicos.
Por lo tanto un robot submarino, que sea modular y que tenga una pluralidad de brazos y de impulsores es uno de los retos y desarrollos más inminetes en la robótica submarina por su 40 potenciual en realizar a grandes profundidades o en entornos incompatibles con humanos como reactores nucleares, labores humanas complejas que implican el uso de dos brazos.
DESCRIPCIÓN DE LA INVENCIÓN
El robot submarino con brazos humanoides transformable en ROV para trabajos en fondos marinos y en construcciones marinas, es un robot con brazos de morfología humanoide que se corresponde con las proporciones cinemáticas de un humano para realizar trabajos y/o para desplazarse y trepar haciendo uso de sus extremidades.
El robot tiene al menos dos brazos de morfologia humanoide. Cada brazo tiene al menos 5 grados de libertad, aunque uno de los brazos puede tener menos grados de libertad, pudiendo ser tres grados de libertad suficientes para que funcione como brazo de apoyo. Los brazos son servo accionados electricamente o hidráulicamente en funcion de la profundidad de trabajo y cuatro impulsores marinos servo-accionados eléctricamente. Mediante este número de grados de libertad en conjunción con su diseño cinemático, el robot puede configurarse de dos maneras. El robot puede estar en la configuración de ROV para navegar, mediante impulsores marinos a hélice estratégicamente situados, o en la configuración humanoide si el robot despliega sus brazos para desplazarse mediante movimientos de trepado, funcionalidad que 5 corresponde a desplazarse por superficies escabrosas con la ayuda de los brazos (extremidades superiores) .
La razón para tener este tipo de capacidad de transformación en ROV o humanoide, obedece a que en los entornos submarinos para desplazarse de un lugar a otro en una distancia 10 importante, es preferible navegar mediante el uso de impulsores marinos. La navegación, por lo tanto, es inherente a cubrir distancias importantes en un entorno de trabajo. Cuando el trabajo submarino esta caracterizado por operaciones sobre entornos locales de fondos marinos o sobre estructuras o construcciones submarinas, entonces es preferible desplazarse apoyándose y sujetándose, si es el caso, sobre la superficie, lo cual implica que no se puede 15 navegar por el contacto sólido entre el robot y el medio.
El tronco del robot está formado por una serie de modulos estancos en los que se encuentra alojado un computador de control, los servoamplifiacores de potencia, la instrumentación y los sistemas de navegacion. El sistema de control...
Reivindicaciones:
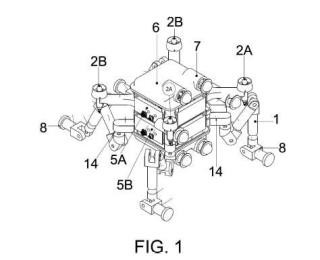
1ª. Robot submarino modular, caracterizado porque se constituye a partir de un tronco formado por una pluralidad de módulos (5) , como (5A) y (5B) que tiene en común unas ranuras 5 (12) que sirven para ensamblar y fijar mecánicamente los módulos (5) , incluyendo además una pluralidad de de brazos robóticos (1) ó (16) y (17) , y otros componentes, tales como impulsores (2A) y (2B) que van ensamblados sobre soportes (13) los cuales a su vez van encajados sobre las ranuras (12) de los módulos (5) , formando un conjuntoconstitutivo del propio robot submarino modular. 10
2ª. Robot submarino modular, según la reivindicación 1ª, caracterizado porque la pluralidad de módulos (5) y la pluralidad de sistemas periféricos, tales como brazos robóticos (1) ó (16) y (17) , y otros componentes como los impulsores (2A) y (2B) son susceptibles de conectarse eléctricamente entre si mediante una pluralidad de conectores estancos de potencia y señal 15 (15A) y (15B) .
3ª. Robot submarino modular, según la reivindicaciones 1ª y 2ª, caracterizado porque la pluralidad de módulos (5) , son estancos e independientes y son susceptibles de contener una pluralidad de componentes, tal como un computador de control a bordo e instrumentación (10) , 20 sistemas de potencia y servo control y baterías (11)
4ª. Robot submarino modular, según la reivindicaciones 1ª, 2ª y 3ª, caracterizado porque la pluralidad de impulsores (2A) , (2B) están preferentemente alineados de forma simétrica vertical o incluso un par de impulsores (2A) alineados de manera vertical y un par de 25 impulsores (2B) alineados de manera horizontal.
5ª. Robot submarino modular, según la reivindicaciones 1ª, 2ª, 3ª y 4ª, caracterizado porque la pluralidad de los brazos robóticos de morfología humanoide (1) sson susceptibles de ensamblarse sobre las ranuras (12) para formar un conjunto de cuatro o dos brazos con una 30 pluralidad de grados de libertad de, al menos, cinco por cada brazo (1) .
6ª. Robot submarino modular, según la reivindicaciones 1ª, 2ª, 3ª y 4ª, caracterizado porque la pluralidad de los brazos robóticos de morfología humanoide (1) son susceptibles de combinarse con brazos de reducidos grados de libertad (16) , (17) para que sirvan de brazos de 35 trabajo y de soporte, respectivamente, los cuales se pueden ensamblar sobre las ranuras (12) para formar un conjunto dual de brazos con una pluralidad de grados de libertad de, al menos, tres por cada brazo.
Patentes similares o relacionadas:
SISTEMA DE AJUSTE DE MOTORES PARA VEHÍCULOS SUBMARINOS DE OPERACIÓN REMOTA PARA APROVECHAMIENTO DE EMPUJE DE MOTORES, del 16 de Julio de 2020, de UNIVERSIDAD SIMÓN BOLIVAR: La presente invención pertenece al campo de buques u otras embarcaciones flotantes, sus equipos y medios de localización o recuperación de objetos […]
Método para instalar un cable submarino, del 17 de Junio de 2020, de FUNDACION TECNALIA RESEARCH & INNOVATION: Un método para instalar un cable submarino con un aparato sumergible , comprendiendo el método: suministrar alimentación eléctrica […]
Un dispositivo de limpieza de superficie, del 17 de Junio de 2020, de HullWiper Limited: Un dispositivo para limpiar superficies sumergidas en agua, que comprende un miembro de disco soportado de manera giratoria por […]
Comunicaciones entre robots móviles de medio acuático, del 6 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un sistema robótico de medio acuático, que comprende: - una estación de control ; - un robot submarino que tiene un cuerpo, una […]
Conjunto de batería para submarino, del 15 de Abril de 2020, de NAVAL GROUP: Conjunto de batería para submarino que incluye al menos un ensamblaje mecánico y eléctrico de ramas , incluyendo cada rama al menos un módulo […]
 Vehículo de inspección in-situ de transformador con un casco de jaula, del 25 de Marzo de 2020, de ABB Power Grids Switzerland AG: Un dispositivo de inspección para usar en un contenedor de fluido, que comprende:
al menos un dispositivo de empuje ;
al menos un dispositivo […]
Vehículo de inspección in-situ de transformador con un casco de jaula, del 25 de Marzo de 2020, de ABB Power Grids Switzerland AG: Un dispositivo de inspección para usar en un contenedor de fluido, que comprende:
al menos un dispositivo de empuje ;
al menos un dispositivo […]
Dispositivo de elevación para un submarino, del 8 de Enero de 2020, de ThyssenKrupp Marine Systems GmbH: Dispositivo de elevación para un submarino para transportar una carga útil a lo largo de una dirección de elevación, caracterizado porque […]
SISTEMA DE RECUPERACIÓN ROBÓTICA DE FONDO DE ESPACIO ACUÁTICO CON NANOPARTICULAS DE OXIGENO, del 12 de Diciembre de 2019, de MIRANDA AGÜERO, Manuel: La presente invención se relaciona con un conjunto de recuperación robótica de fondo de espacio acuático mediante nanopartículas de oxígeno, que comprende […]