PROCEDIMIENTO Y DISPOSITIVO PARA ESTABILIZAR UN VEHICULO.
Procedimiento para la estabilización de un vehículo de carretera (1),
en particular de un vehículo de pasajeros, con un remolque (2), el cual es arrastrado por el vehículo de carretera (1), con lo cual, el vehículo de carretera (1) es controlado con respecto a balanceos y, al detectar un balanceo, es aplicado automáticamente un momento de guiñada fundamentalmente periódico, de modo que éste se encuentra fundamentalmente en oposición (14) al balanceo, caracterizado porque, al ser aplicado el momento de guiñada en ambos lados del vehículo de carretera (1), son aplicadas diferentes fuerzas de frenado
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DE00/02091.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20,70442 STUTTGART.
Inventor/es: RUPP, PETER, ZOEBELE,ANDREAS.
Fecha de Publicación: .
Fecha Concesión Europea: 24 de Febrero de 2010.
Clasificación Internacional de Patentes:
- B60T7/20 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 7/00 Organos de iniciación de la acción de los frenos. › especialmente para remolques, p. ej. en el caso de un desenganche (frenos de sobrevelocidad desencadenados por inercia B60T 13/08).
- B60T8/1755 B60T […] › B60T 8/00 Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10). › Regulación de los frenos especialmente adaptada para el control de la estabilidad del vehículo, p.ej. teniendo en cuenta el ángulo de oscilación o la aceleración transversal al tomar una curva (sistemas de control de la estabilidad dinámica de los vehículos por otra forma que controlando una subunidad particular B60W 30/02).
- B60T8/17P9
- B60T8/24 B60T 8/00 […] › que responden a la inclinación del vehículo o su cambio de dirección, p. ej. en un viraje.
- B60T8/32D8
- B62D37/00 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › Estabilización de cajas de vehículos sin actuar sobre los dispositivos de suspensión.
- B62D53/08E
- B62D6/04 B62D […] › B62D 6/00 Dispositivos para el control automático de la dirección en función de las condiciones de conducción, que son detectadas y para las cuales es aplicada una reacción (medios para producir un cambio en la dirección del vehículo B62D 1/00; válvulas de control de la dirección B62D 5/06; combinados con medios para inclinar el vehículo o las ruedas en los giros B62D 9/00). › reaccionando únicamente a las fuerzas que perturban la dirección deseada del vehículo, p. ej. fuerzas que actúan transversalmente a la dirección de desplazamiento del vehículo.
- B62D7/15G
Clasificación PCT:
- B60D1/30 B60 […] › B60D CONEXIONES PARA VEHICULOS (elementos de los sistemas de frenos B60T 17/04). › B60D 1/00 Conexión de tracción; Enganches; Organos de tracción; Dispositivos de remolque (dispositivos particulares para el enganche de tractores a las máquinas o a los instrumentos agrícolas A01B 59/00; acoplamientos de la quinta rueda B62D). › para el control antibalanceo.
- B60T8/00 B60T […] › Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10).
- B62D37/00 B62D […] › Estabilización de cajas de vehículos sin actuar sobre los dispositivos de suspensión.
- B62D6/04 B62D 6/00 […] › reaccionando únicamente a las fuerzas que perturban la dirección deseada del vehículo, p. ej. fuerzas que actúan transversalmente a la dirección de desplazamiento del vehículo.
- B62D7/15 B62D […] › B62D 7/00 Timonería de dirección; Manguetas o su montaje (B62D 13/00 tiene prioridad; dirección asistida o de relé de potencia B62D 5/00). › caracterizada por medios que modifican la relación entre los ángulos de dirección de las ruedas directrices (variando el radio automáticamente en función de las condiciones de conducción B62D 6/00).
Clasificación antigua:
- B60D1/30 B60D 1/00 […] › para el control antibalanceo.
- B60T8/00 B60T […] › Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10).
- B62D37/00 B62D […] › Estabilización de cajas de vehículos sin actuar sobre los dispositivos de suspensión.
- B62D6/04 B62D 6/00 […] › reaccionando únicamente a las fuerzas que perturban la dirección deseada del vehículo, p. ej. fuerzas que actúan transversalmente a la dirección de desplazamiento del vehículo.
- B62D7/15 B62D 7/00 […] › caracterizada por medios que modifican la relación entre los ángulos de dirección de las ruedas directrices (variando el radio automáticamente en función de las condiciones de conducción B62D 6/00).
Fragmento de la descripción:
Procedimiento y dispositivo para estabilizar un vehículo.
La presente invención hace referencia a un procedimiento y a un dispositivo para la estabilización de un vehículo de carretera, en especial de un vehículo de pasajeros, con un remolque, el cual es arrastrado por el vehículo de carretera. En el caso de vehículos de carretera con remolques, en determinadas condiciones, por ejemplo a través de una velocidad excesiva, malas condiciones de las carreteras, viento de costado o condiciones similares, puede llegar a producirse un balanceo del conjunto vehículo-remolque compuesto por un vehículo de carretera y un remolque. Por ejemplo, el artículo "FDR- El control de estabilidad de Bosch", de A. van Zanten, R. Erhardt y G. Pfaff, ATZ Revista técnica sobre automóviles 96 (1994) 11 páginas 674 a 689 y la SAE -Paper 973184 "Vehicle Dynamics Controler for Commercial Vehicles" de F. Hecker, S. Hummel, O. Jundt, K.-D. Leimbach, I. Faye, H. Schramm, revelan soluciones muy eficaces para el control de estabilidad del movimiento de automóviles de vehículos y semirremolques. No obstante, en el caso del arrastre de remolques, en especial de remolques que no presentan ningún actuador, así como sensor propio para el control de la estabilidad del movimiento del automóvil, surgen dificultades particulares. Esto es válido, particularmente, al establecer una comparación con remolques pesados para el vehículo que lo arrastra. De este modo, se presentan problemas de estabilidad especiales, por ejemplo, en el caso de vehículos de pasajeros, los cuales remolcan una casa rodante.
Si llega a producirse un movimiento de balanceo, así como movimientos pendulares del conjunto vehículo-remolque compuesto por un vehículo de carretera y un remolque, el remolque oscila alrededor de su eje vertical, estimulando así, también en el vehículo remolcador, un movimiento de vaivén, mediante el acoplamiento con el remolque. Si la velocidad del vehículo remolcador se ubica por debajo de la así llamada velocidad crítica, los movimientos oscilatorios son amortiguados. Si la velocidad del vehículo remolcador es igual a una velocidad crítica, los movimientos oscilatorios no son amortiguados, y si la velocidad del vehículo remolcador se ubica por encima de la velocidad crítica, los movimientos oscilatorios producen sonido. El valor de la velocidad crítica depende, entre otros factores, de datos de la geometría como por ejemplo la distancia entre los ejes y la longitud del enganche, de la masa y del momento de inercia de la guiñada del vehículo y del remolque, y de la rigidez oblicua de los ejes. Este valor varía, en el caso de conjuntos vehículo-remolque dentro del área de los vehículos de pasajeros, por lo general en un rango de 90 a 130 km/h. La frecuencia del movimiento oscilatorio, así como del movimiento pendular asciende aproximadamente de 0,5 a 1,5 Hz.
Por la solicitud DE 41 27 750 C1 es conocido un dispositivo para el aumento de la estabilidad pendular de conjuntos vehículo-remolque. El vehículo delantero, así como el vehículo remolcador, posee una dirección adicional automática, la cual reacciona ante el ángulo de inclinación entre los vehículos, así como ante la velocidad de las variaciones del ángulo de inclinación, ejecutando automáticamente maniobras, cuando el vehículo trasero realiza movimientos pendulares no deseados.
Es objeto de la presente invención exponer un procedimiento, así como un dispositivo, mediante el cual sea mejorada la estabilidad de dirección en los vehículos de carretera, los cuales arrastran un remolque. Es particularmente deseable, que la solución acorde a la invención no requiera el empleo de gran cantidad de sensores.
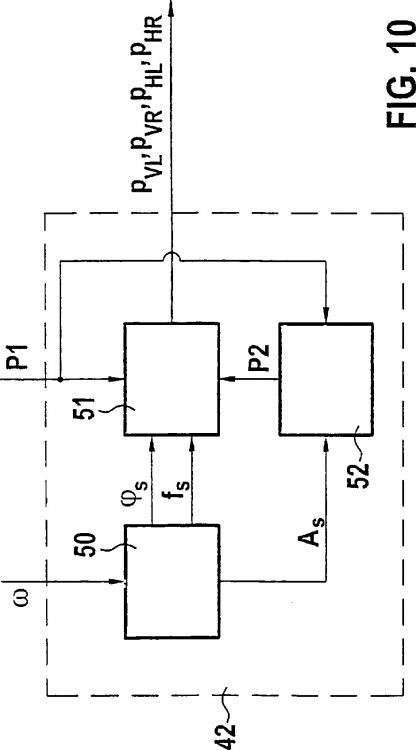
Este objeto se alcanzará a través de un procedimiento conforme a la reivindicación 1 y de un dispositivo conforme a la reivindicación 12. Para estabilizar un vehículo de carretera, en especial un vehículo de pasajeros, con un remolque, el cual es arrastrado por el vehículo de carretera, el vehículo remolcador es controlado con respecto a movimientos de balanceo y, al detectar un movimiento de balanceo, al vehículo de carretera le es aplicado automáticamente un momento de guiñada fundamentalmente periódico, en especial con una duración de dos períodos, de modo que éste se encuentra fundamentalmente en oposición al balanceo. De este modo es posible reducir un balanceo del conjunto vehículo-remolque, compuesto por un vehículo de carretera y un remolque, así como también estabilizar el conjunto vehículo-remolque. Como balanceos, se comprende aquí, que el vehículo de carretera, el cual arrastra el remolque, es conducido a una aceleración lateral fundamentalmente periódica, así como a una aceleración de guiñada fundamentalmente periódica. No se trata en este caso de una oscilación estrictamente periódica (el conjunto vehicular no representa un péndulo ideal), más bien pueden presentarse oscilaciones temporales durante el período de movimiento pendular del remolque, así como de los tráileres. Éstas se encuentran, por ejemplo, en la señal esencialmente periódica, así como reiterada, provocada por un sensor. Esto significa, que esta señal presenta un período que varía dentro de límites reducidos, la cual puede observarse idealmente, sin embargo, como una señal constante en el tiempo. De manera correspondiente, el momento de guiñada aplicado fundamentalmente periódico, tampoco es estrictamente periódico. De acuerdo a las oscilaciones en los períodos del movimiento pendular del conjunto vehículo - remolque, varía también la duración del período en el momento de guiñada aplicado.
Para la detección de un movimiento de balanceo, puede, por ejemplo, preverse la medición de la aceleración lateral del vehículo de carretera con un sensor de aceleración lateral. Para la detección del movimiento de balanceo son evaluadas la frecuencia y la amplitud de la señal detectada por el sensor de aceleración lateral. La frecuencia resulta, por ejemplo, de la distancia temporal de los puntos cero consecutivos. Existe un balanceo, por ejemplo, cuando la frecuencia detectada se ubica dentro de una banda de frecuencia predeterminada y cuando la amplitud es mayor que un valor umbral. Con respecto a esto, constituye una ventaja adicional, el observar la velocidad con respecto a la aceleración lateral y/o el ángulo de dirección del vehículo, para diferenciar un balanceo de un movimiento de dirección del vehículo. En la figura 9 se representa un ejemplo para una detección de balanceos.
Es particularmente ventajoso, junto con la presente invención, el llevar a cabo una detección de balanceos, en la cual al menos se determine una magnitud dinámica lateral, como la aceleración lateral, la velocidad de guiñada o la aceleración de guiñada, así como la velocidad del vehículo, con lo cual, el movimiento de balanceo es establecido en función de al menos una magnitud dinámica lateral y de la velocidad. De manera ventajosa, esto tiene lugar a través de un análisis con respecto a la comparación entre las magnitudes relativas a las magnitudes dinámicas laterales y la velocidad, y los valores umbral adjudicados a las mismas. Es particularmente ventajoso, el medir tanto la aceleración lateral como la velocidad de guiñada. Para la determinación de un movimiento de balanceo, presenta también una ventaja, el medir el ángulo de dirección y el considerar movimientos de dirección rápidos para poder establecer movimientos de balanceo. En forma ventajosa, se prevé para ello el empleo de un filtro de paso alto, mediante el cual es filtrada una señal correspondiente al ángulo de dirección. Si esta señal de dirección filtrada es mayor a un valor umbral determinado, se considera en forma ventajosa, que no existe ningún movimiento de balanceo.
En forma acorde a la invención, la aplicación del momento de guiñada tiene lugar a través de la aplicación de diferentes fuerzas de frenado en ambos lados del vehículo de carretera. De esta manera, el momento de guiñada periódico es aplicado en forma particularmente ventajosa sin la necesidad de movimientos de dirección. Además, es posible conforme a esta invención, el implementar favorablemente la presente invención en vehículos equipados con ABS (sistema de antibloqueo), aún cuando no presente ningún control de estabilidad (FDR, ESP).
En otra conformación ventajosa de la presente invención, la aplicación del momento de guiñada fundamentalmente periódico se efectúa mediante un frenado unilateral del vehículo. De este modo, se logra una estabilidad particularmente buena del conjunto vehículo-remolque, compuesto por un vehículo de carretera y un remolque.
En otra conformación ventajosa...
Reivindicaciones:
1. Procedimiento para la estabilización de un vehículo de carretera (1), en particular de un vehículo de pasajeros, con un remolque (2), el cual es arrastrado por el vehículo de carretera (1), con lo cual, el vehículo de carretera (1) es controlado con respecto a balanceos y, al detectar un balanceo, es aplicado automáticamente un momento de guiñada fundamentalmente periódico, de modo que éste se encuentra fundamentalmente en oposición (14) al balanceo, caracterizado porque, al ser aplicado el momento de guiñada en ambos lados del vehículo de carretera (1), son aplicadas diferentes fuerzas de frenado.
2. Procedimiento conforme a la reivindicación 1, caracterizado porque, la aplicación del momento de guiñada fundamentalmente periódico tiene lugar a través de un frenado unilateral automático del vehículo.
3. Procedimiento conforme a la reivindicación 1 ó 2, caracterizado porque, la aplicación del momento de guiñada fundamentalmente periódico sólo tiene lugar cuando se encuentra presente una aceleración lateral (ay) y/o una velocidad de guiñada (?), la cual no tiene su origen en movimientos de conducción realizados por el conductor.
4. Procedimiento conforme a la reivindicación 1, 2 ó 3, con lo cual el remolque (2) presenta un freno de inercia, caracterizado porque, el vehículo de carretera (1) es frenado adicionalmente de ese modo en forma breve y automática, de manera que el freno de inercia del remolque (2) es accionado.
5. Procedimiento conforme a la reivindicación 1, 2, 3 ó 4, con lo cual el remolque (2) presenta un freno de inercia, caracterizado porque, el vehículo de carretera (1), después de la aplicación del momento de guiñada, es frenado de modo tal en forma breve y automática, que el freno de inercia del remolque (2) es accionado.
6. Procedimiento conforme a la reivindicación 4 ó 5, caracterizado porque, el frenado breve y automático para el accionamiento del freno de inercia del remolque (2) tiene lugar a través de la reducción del momento de accionamiento de un motor, el cual acciona al vehículo de carretera (1).
7. Procedimiento conforme a la reivindicación 6, caracterizado porque, el frenado breve y automático del vehículo de carretera (1) tiene lugar en un punto cero del movimiento de balanceo.
8. Procedimiento conforme a la reivindicación 6 ó 7, caracterizado porque, el frenado breve y automático del vehículo de carretera (1) sólo tiene lugar, cuando la aplicación del momento de guiñada ha conducido a una disminución del movimiento de balanceo.
9. Procedimiento conforme a una de las reivindicaciones precedentes, caracterizado porque, la velocidad del vehículo de carretera (1) es reducida de modo tal, que es menor a una velocidad crítica.
10. Procedimiento conforme a una de las reivindicaciones precedentes, caracterizado porque, el vehículo de carretera (1) es acelerado brevemente en forma automática.
11. Dispositivo de estabilización para estabilizar un vehículo de carretera (1), en especial un vehículo de pasajeros, con un remolque (2) de acuerdo a un procedimiento conforme a una de las reivindicaciones precedentes, con lo cual el dispositivo de estabilización (20) presenta un medio para la detección de movimientos de balanceo del vehículo de carretera (1), así como para la aplicación de un momento de guiñada fundamentalmente periódico en el vehículo de carretera (1) al detectar un movimiento de balanceo, con lo cual, el momento de guiñada se encuentra fundamentalmente en oposición (14) al movimiento de balanceo, caracterizado porque, al ser aplicado el momento de guiñada en ambos lados del vehículo de carretera (1), son aplicadas diferentes fuerzas de frenado.
Patentes similares o relacionadas:
Vehículo de dos ruedas auto estabilizantes, en particular, un vehículo anfibio, del 21 de Agosto de 2019, de Def-Tech SAS. Di Ettore De Francesco&C: Vehículo que comprende, exactamente, dos ruedas paralelas, ambas ruedas de accionamiento, que constituyen cuerpos internamente huecos, teniendo cada uno dos […]
 CONTROLADOR DE MOTOR DE VEHICULO QUE TIENE UN SENSOR DE INCLINACION, del 1 de Agosto de 2008, de HONDA MOTOR CO., LTD.: Controlador de motor de vehículo que tiene un sensor de inclinación.#Problema: Proporcionar un controlador de motor de vehículo, que tiene un sensor de inclinación, que […]
CONTROLADOR DE MOTOR DE VEHICULO QUE TIENE UN SENSOR DE INCLINACION, del 1 de Agosto de 2008, de HONDA MOTOR CO., LTD.: Controlador de motor de vehículo que tiene un sensor de inclinación.#Problema: Proporcionar un controlador de motor de vehículo, que tiene un sensor de inclinación, que […]
VEHICULOS DE MOVILIDAD PERSONAL Y PROCEDIMIENTOS., del 1 de Noviembre de 2006, de DEKA PRODUCTS LIMITED PARTNERSHIP: Un dispositivo para transportar un usuario, comprendiendo el dispositivo: a) una plataforma que soporta una carga que incluye al usuario, […]
ALERON TRASERO PARA VEHICULOS AUTOMOVILES., del , de IRMSCHER IBERIA, S.A.: 1. Alerón trasero para vehículos automóviles, que estando previsto para su montaje y fijación sobre la tapa correspondiente al maletero de un […]
VEHICULO DE DOS RUEDAS PARALELAS., del 1 de Mayo de 1999, de DEFEZ SCHMIDT, JOSE LUIS: VEHICULO DE DOS RUEDAS PARALELAS SITUADAS EN LOS LADOS IZQUIERDO Y DERECHO DE UN CHASIS, QUE FUNCIONA MEDIANTE EQUILIBRADORES DE LAS PARTES DELANTERA Y TRASERA […]
SISTEMA DE SUSPENSION CENTRIPETA PARA VEHICULOS CON DESPLAZAMIENTO DE PESO A LAS RUEDAS INTERIORES., del 1 de Febrero de 1999, de MAGEREN, JEAN-PIERRE MAGEREN, CLAUDE: SISTEMA DE SUSPENSION PARA VEHICULO QUE COMPRENDE UN COJINETE DE SUSPENSION Y UNA CAJA QUE EN SU PUNTO DE APOYO LATERALMENTE MOVIL RESPECTO DEL COJINETE Y QUE DESPLAZA SU PUNTO […]
 AUTOMOVIL ULTRA-ESTRECHO ESTABILIZADO CON LASTRE, del 16 de Mayo de 2008, de WOODBURY, RICHARD W.
WOODBURY, BRYAN A.: Un automóvil que comprende: una carrocería con una cabina cerrada para asientos en tándem con una longitud y una anchura que definen cuatro […]
AUTOMOVIL ULTRA-ESTRECHO ESTABILIZADO CON LASTRE, del 16 de Mayo de 2008, de WOODBURY, RICHARD W.
WOODBURY, BRYAN A.: Un automóvil que comprende: una carrocería con una cabina cerrada para asientos en tándem con una longitud y una anchura que definen cuatro […]
 DISPOSITIVO DE SEPARACION DE LAS DOS RUEDAS DE UN MISMO EJE, del 16 de Marzo de 2008, de HARDI-EVRARD: Dispositivo de separación de las dos ruedas de un mismo eje de un vehículo, en especial destinado a los trabajos agrícolas, que comprende una cuna central solidaria, con […]
DISPOSITIVO DE SEPARACION DE LAS DOS RUEDAS DE UN MISMO EJE, del 16 de Marzo de 2008, de HARDI-EVRARD: Dispositivo de separación de las dos ruedas de un mismo eje de un vehículo, en especial destinado a los trabajos agrícolas, que comprende una cuna central solidaria, con […]