Procedimiento y sistema de control para controlar un motor eléctrico sin escobilla.
Procedimiento para el control de un motor eléctrico (M) sin escobilla conmutado electrónicamente,
rectificándose una tensión alterna de red (UN) trifásica a una tensión continua de circuito intermedio (UZK) y suministrándose esta tensión continua (UZK) a través de un circuito intermedio delgado (6) a un inversor (2) que a través de un control de motor (10) para la temporización de PWM con el fin de la conmutación del motor eléctrico (M) y el ajuste del número de revoluciones del motor se puede controlar con un ciclo de trabajo (A) variable, estando configurado el circuito intermedio delgado sin condensador de aplanamiento o al menos sin condensador electrolítico, de tal manera que la tensión continua de circuito intermedio (UZK) está afectada por una magnitud perturbadora periódica, influyéndose para la compensación de la magnitud perturbadora en el ciclo de trabajo (A) con un factor de compensación (k) de tal manera que en el circuito intermedio (6) el producto de tensión continua de circuito intermedio (UZK) y una corriente de circuito intermedio (IZK) resultante se mantiene constante, caracterizado por que la tensión continua de circuito intermedio (UZK) se supervisa en relación con la magnitud de una parte alterna (UZKca), cambiándose en el caso de alcanzar o superar un primer valor límite (UZKca-máx1) predefinido de la parte alterna (UZKca) de una tensión continua de circuito intermedio medida actualmente (UZK.act.med) el factor de compensación (k) mediante un regulador (20) para la reducción de la compensación de magnitud perturbadora hasta que la parte alterna actual (UZKca) disminuya de nuevo a o por debajo del valor límite (UZKca.máx1), calculándose el factor de compensación (k) dependiendo de la tensión continua de circuito intermedio medida actualmente (UZK.act.med), de un valor medio de las tensiones continuas de circuito intermedio medidas actualmente (UZK.medi.med) y un factor de escala (Sk).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11152387.
Solicitante: EBM-PAPST MULFINGEN GMBH & CO.KG.
Nacionalidad solicitante: Alemania.
Dirección: BACHMUHLE 2 74673 MULFINGEN ALEMANIA.
Inventor/es: Wystup,Ralph, König,Daniel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H02M1/14 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02M APARATOS PARA LA TRANSFORMACION DE CORRIENTE ALTERNA EN CORRIENTE ALTERNA, DE CORRIENTE ALTERNA EN CORRIENTE CONTINUA O DE CORRIENTE CONTINUA EN CORRIENTE CONTINUA Y UTILIZADOS CON LAS REDES DE DISTRIBUCION DE ENERGIA O SISTEMAS DE ALIMENTACION SIMILARES; TRANSFORMACION DE UNA POTENCIA DE ENTRADA EN CORRIENTE CONTINUA O ALTERNA EN UNA POTENCIA DE SALIDA DE CHOQUE; SU CONTROL O REGULACION (transformadores H01F; convertidores dinamoeléctricos H02K 47/00; control de los transformadores, reactancias o bobinas de choque, control o regulación de motores, generadores eléctricos o convertidores dinamoeléctricos H02P). › H02M 1/00 Detalles de aparatos para transformación. › Disposiciones de reducción de ondulaciones de una entrada o de una salida en corriente continua.
- H02P27/08 H02 […] › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 27/00 Disposiciones o métodos para el control de motores de corriente alterna caracterizados por la clase de voltaje de alimentación (de dos o más motores H02P 5/00; de motores síncronos con conmutadores electrónicos H02P 6/00; de motores de corriente continua H02P 7/00; de motores paso a paso H02P 8/00). › con modulación del ancho de pulso.
- H02P6/16 H02P […] › H02P 6/00 Disposiciones para el control de motores síncronos u otros motores dinamoeléctricos mediante conmutación electrónica en función de la posición del rotor; Conmutadores electrónicos a este fin (control vectorial H02P 21/00). › Circuitos para detección de la posición.
PDF original: ES-2472945_T3.pdf
Fragmento de la descripción:
Procedimiento y sistema de control para controlar un motor eléctrico sin escobilla La presente invención se refiere en primer lugar de acuerdo con el preámbulo de la reivindicación 1 a un procedimiento para el control de un motor eléctrico sin escobilla conmutado electrónicamente, rectificándose una tensión alterna de red trifásica a una tensión continua de circuito intermedio y suministrándose esta tensión continua a través de un circuito intermedio delgado a un inversor que a través de un control de motor para la conmutación del motor eléctrico y para el ajuste del número de revoluciones del motor se puede controlar con un ciclo de trabajo variable, de tal manera que gracias a una determinada temporización de tensión variable a través del ciclo de trabajo se forman corrientes de motor casi sinusoidales, estando configurado el circuito intermedio delgado sin condensador de aplanamiento o al menos sin condensador electrolítico con al menos un condensador de hojas y, por tanto, con una impedancia de circuito intermedio correspondientemente reducida, en particular una capacitancia reducida de circuito intermedio, de tal manera que la tensión continua de circuito intermedio está afectada por una magnitud
perturbadora periódica, influyéndose para la compensación de la magnitud perturbadora en el ciclo de trabajo con un factor de compensación, de tal manera que en el circuito intermedio el producto de tensión continua de circuito intermedio y una corriente de circuito intermedio resultante se mantiene constante a lo largo de la evolución en el tiempo.
Además, la invención se refiere también a un sistema de control correspondiente, que trabaja según el procedimiento de acuerdo con la invención, de acuerdo con el preámbulo de la reivindicación 6.
En caso de motores eléctricos sin escobilla conmutados electrónicamente, los denominados motores EC, es sabido cómo generar a partir de una tensión continua de circuito intermedio a través de un inversor controlado por PWM 25 (PWM = pulse width modulation = modulación de duración de impulsos) tensiones entre fases para arrollamientos de fases del motor, pudiéndose ajustar a través de una variación de las proporciones de ciclo, es decir, del denominado ciclo de trabajo del control de PWM también el número de revoluciones del motor. Habitualmente, la tensión continua de circuito intermedio se crea mediante rectificación de una tensión alterna de red monofásica o, en particular, trifásica, generándose a través de un rectificador en puente no controlado en primer lugar una tensión continua en impulsos muy ondulada. En el caso de una tensión de red trifásica con la frecuencia habitual de 50 Hz, la tensión rectificada tiene impulsos con una frecuencia de impulsos de 300 Hz. Por tanto, en realidad se requiere un aplanamiento a través de al menos un condensador de aplanamiento y, dado el caso, una inductancia de filtro adicional. Debido a la capacitancia relativamente grande, necesaria en realidad para esto, del condensador de aplanamiento, normalmente se emplean condensadores electrolíticos (elcos) , pero los mismos en el empleo práctico tienen algunas desventajas y, de hecho, en particular un gran volumen constructivo y una reducida vida útil.
Por tanto, actualmente existe la tendencia de prescindir por completo de condensadores de aplanamiento o al menos de condensadores electrolíticos, empleándose en el segundo caso condensadores de hojas de mayor vida útil con menor capacitancia. En este caso se habla de un "circuito intermedio delgado". Pero a este respecto aparece la desventaja de que la ondulación residual se transmite como magnitud perturbadora al par del motor. Un par por impulsos o una ondulación de par, sin embargo, conduce a una intensa formación de ruidos que puede ser muy molesta en particular en caso de accionamientos de ventilador.
Por tanto, se sabe cómo prever una compensación de magnitud perturbadora, invirtiéndose la magnitud
perturbadora e influyéndose en el ciclo de trabajo con un factor de compensación, de tal manera que en el circuito intermedio el producto de tensión continua de circuito intermedio y una corriente de circuito intermedio resultante a través del inversor se mantiene constante a lo largo de la evolución en el tiempo. Esta compensación de la tensión continua de circuito intermedio ondulada causa, por tanto, un consumo constante de potencia del motor eléctrico. La función inversa de la tensión continua de circuito intermedio se superpone al ciclo de trabajo del motor. Para esto, con una tensión continua de circuito intermedio respectivamente decreciente/creciente, el ciclo de trabajo del motor se amplía/reduce de tal manera que el producto de corriente de circuito intermedio y tensión continua de circuito intermedio permanece constante. Esto significa también que con una tensión continua de circuito intermedio respectivamente decreciente, la corriente de circuito intermedio tiene que aumentar.
En el documento EP 2 164 164 A1 en un sistema de control correspondiente para el control de un motor eléctrico sin escobilla está previsto un tipo particular de compensación de magnitud perturbadora y, en concreto, se trata de una compensación de magnitud perturbadora optimizada dinámicamente. A este respecto, durante el funcionamiento mediante supervisión del par actual se registra el efecto de la respectiva compensación de magnitud perturbadora sobre el par actual y se optimiza periódicamente mediante variación de la magnitud de compensación o del factor de compensación para minimizar la ondulación del par y, por ello, también la generación de ruidos.
Durante el empleo práctico, una compensación de magnitud perturbadora junto con un circuito intermedio delgado puede conducir a la desventaja de que aparezcan sobretensiones inadmisibles en el circuito intermedio. Ya que por norma general los inversores están equipados con una desconexión de sobretensión para proteger los componentes 65 electrónicos frente a tensiones inadmisiblemente altas, esto puede conducir a desconexiones indeseadas del
funcionamiento del motor. Esto puede conducir en caso de accionamientos relevantes para la seguridad, tales como accionamientos de ventilador, a otros daños secundarios por sobrecalentamiento de un equipo a refrigerar.
La presente invención se basa en el objetivo de indicar un procedimiento del tipo que se ha descrito al principio y de crear un sistema de control correspondiente para ampliar el intervalo de funcionamiento del motor eléctrico, de tal manera que se pueda mantener el funcionamiento también a lo largo de intervalos de trabajo por lo demás vulnerables a perturbaciones. De acuerdo con la invención, esto se consigue por un lado mediante un procedimiento con las características de la reivindicación 1 y, por otro lado, mediante un sistema de control de acuerdo con la reivindicación 6. En las reivindicaciones dependientes están contenidas configuraciones ventajosas.
La invención se basa en los siguientes conocimientos. Debido a la compensación de magnitud perturbadora que se ha explicado anteriormente, con una tensión continua de circuito intermedio respectivamente decreciente, la corriente del circuito intermedio respectivamente tiene que aumentar. Por ello se genera una corriente por impulsos, lo que causa, en particular con un funcionamiento en una red de alta impedancia, en particular de alta inductancia,
una excitación de la tensión de red y, por tanto, también de la tensión continua de circuito intermedio rectificada en el circuito intermedio. Con una tensión pequeña fluye una gran corriente y la tensión decreciente por ello a través de la inductancia de red reduce, por tanto, la tensión existente en el consumidor. Si la tensión de red aumenta, se reduce la corriente de red. La inductancia de red actúa ahora en el fondo como una fuente adicional de tensión, ya que la energía acumulada en la impedancia de red fluye a través de la corriente de red ahora menor al circuito intermedio. A este respecto se suma la tensión en la inductancia de red a la tensión de red; se produce un aumento excesivo de la tensión. A partir de esto resulta un aumento de la parte de tensión alterna en la tensión continua del circuito intermedio, aumentando la amplitud de la tensión con impedancia de red y carga de motor crecientes. Como consecuencia pueden aparecer picos de tensión tan altos que se desconecta el funcionamiento del motor por una protección contra sobretensión.
Para evitar esto al menos a lo largo de un intervalo de funcionamiento ampliado, de acuerdo con la invención en un primer tipo de realización (reivindicaciones 1 y 6) está previsto que se supervise la tensión continua de circuito intermedio en relación con la magnitud... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para el control de un motor eléctrico (M) sin escobilla conmutado electrónicamente, rectificándose una tensión alterna de red (UN) trifásica a una tensión continua de circuito intermedio (UZK) y suministrándose esta 5 tensión continua (UZK) a través de un circuito intermedio delgado (6) a un inversor (2) que a través de un control de motor (10) para la temporización de PWM con el fin de la conmutación del motor eléctrico (M) y el ajuste del número de revoluciones del motor se puede controlar con un ciclo de trabajo (A) variable, estando configurado el circuito intermedio delgado sin condensador de aplanamiento o al menos sin condensador electrolítico, de tal manera que la tensión continua de circuito intermedio (UZK) está afectada por una magnitud perturbadora periódica, influyéndose para la compensación de la magnitud perturbadora en el ciclo de trabajo (A) con un factor de compensación (k) de tal manera que en el circuito intermedio (6) el producto de tensión continua de circuito intermedio (UZK) y una corriente de circuito intermedio (IZK) resultante se mantiene constante, caracterizado por que la tensión continua de circuito intermedio (UZK) se supervisa en relación con la magnitud de una parte alterna (UZKca) , cambiándose en el caso de alcanzar o superar un primer valor límite (UZKca-máx1) predefinido de la parte alterna (UZKca) de una tensión continua de circuito intermedio medida actualmente (UZK.act.med) el factor de compensación (k) mediante un regulador
(20) para la reducción de la compensación de magnitud perturbadora hasta que la parte alterna actual (UZKca) disminuya de nuevo a o por debajo del valor límite (UZKca.máx1) , calculándose el factor de compensación (k) dependiendo de la tensión continua de circuito intermedio medida actualmente (UZK.act.med) , de un valor medio de las tensiones continuas de circuito intermedio medidas actualmente (UZK.medi.med) y un factor de escala (Sk) .
2. Procedimiento de acuerdo con el preámbulo de la reivindicación 1, caracterizado por que la tensión alterna de red (UN) se rectifica hasta dar una tensión continua de medición (UZK') adicional, correspondiente o proporcional a la tensión continua de circuito intermedio (UZK) , supervisándose esta tensión continua de medición (UZK') en relación con la magnitud de una parte alterna (UZKca) , cambiándose en el caso de alcanzar o superar un primer valor límite (UZKca.máx1) predefinido de la parte alterna (UZKca) el factor de compensación (k) para la reducción de la compensación de magnitud perturbadora hasta que la parte alterna actual (UZKca) descienda de nuevo a o por debajo del valor límite (UZKca.máx1) .
3. Procedimiento de acuerdo con la reivindicación 1 o 2, caracterizado por que en el caso de que la parte alterna actual (UZKca) no descienda a o por debajo del primer valor límite (UZKca.máx1) , sino que alcanza o supera un segundo valor límite (UZKca.máx2) predefinido mayor de la parte alterna (UZKca) de la tensión continua de circuito intermedio (UZK) o de la tensión continua de medición (UZK') , se cambia el ciclo de trabajo (A) para la reducción de la potencia del motor.
4. Procedimiento de acuerdo con una de las reivindicaciones 1 a 3, caracterizado por que con una aparición de picos de tensión definidos como inadmisiblemente altos de la tensión continua de circuito intermedio (UZK) o de la tensión continua de medición (UZK') se desconecta el funcionamiento del motor eléctrico (M) .
5. Procedimiento de acuerdo con una de las reivindicaciones 1 a 4, caracterizado por que la compensación de magnitud perturbadora se optimiza dinámicamente para la minimización de la ondulación del par del motor eléctrico (M) mediante una regulación.
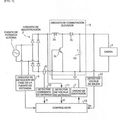
6. Sistema de control para un motor eléctrico (M) sin escobilla conmutado electrónicamente con aplicación del procedimiento de acuerdo con una de las reivindicaciones precedentes, con un rectificador de red (4) que rectifica 45 una tensión alterna de red (UN) trifásica en una tensión continua de circuito intermedio (UZK) y con un inversor (2) pospuesto a través de un circuito intermedio delgado (6) configurado sin condensador de aplanamiento o al menos sin condensador electrolítico que para la conmutación del motor eléctrico (M) y para el ajuste del número de revoluciones se puede controlar a través de un control de motor (10) para la temporización de tensión de PWM con un ciclo de trabajo (A) variable así como con un equipo para la compensación de magnitud perturbadora en relación con la tensión continua de circuito intermedio (UZK) afectada por una magnitud perturbadora periódica, pudiéndose influir en el ciclo de trabajo (A) con un factor de compensación (k) de tal manera que en el circuito intermedio (6) el producto de la tensión continua de circuito intermedio (UZK) y una corriente de circuito intermedio (IZK) resultante se mantiene constante, caracterizado por un primer circuito de regulación con un regulador (20) que compara la magnitud de una parte alterna (UZKca) de la tensión continua de circuito intermedio (UZK) con un primer valor límite 55 (UZKca.máx1) predefinido, reduciéndose al alcanzar o superar el primer valor límite (UZKca.máx1) de la parte alterna (UZKca) de una tensión continua de circuito intermedio medida actualmente (UZK.act.med) por cambio del factor de compensación (k) mediante el regulador (20) la compensación de magnitud perturbadora, hasta que la parte alterna actual (UZKca) disminuya de nuevo a o por debajo del primer valor límite, calculándose el factor de compensación (k) dependiendo de la tensión continua de circuito intermedio medida actualmente (UZK.act.med) , de un valor medio de las tensiones continuas de circuito intermedio medidas actualmente (UZK.medi.med) y un factor de escala (Sk) .
7. Sistema de control de acuerdo con el preámbulo de la reivindicación 6, caracterizado por un rectificador de red (4a) adicional que rectifica la tensión alterna de red (UN) en una tensión continua de medición (UZK') independiente y por un circuito de regulación con un regulador (20) que compara la magnitud de una parte alterna (UZKca) de la 65 tensión continua de medición (UZK') con un primer valor límite (UZKca.máx1) predefinido, reduciéndose al alcanzar o superar el primer valor límite por cambio del factor de compensación (k) la compensación de magnitud perturbadora hasta que la parte alterna actual (UZKca) disminuya de nuevo a o por debajo del primer valor límite.
8. Sistema de control de acuerdo con la reivindicación 6 o 7, caracterizado por un segundo circuito de regulación con un regulador (28) que compara la magnitud de la parte alterna (UZKca) de la tensión continua de circuito intermedio (UZK) o de la tensión continua de medición (UZK') con un segundo valor límite (UZKca.máx2) predefinido mayor, realizándose al alcanzar o superar el segundo valor límite por cambio del ciclo de trabajo (A) una reducción de la potencia del motor.
9. Sistema de control de acuerdo con una de las reivindicaciones 6 a 8, caracterizado por que el/cada regulador (20, 28) está configurado como regulador PI.
10. Sistema de control de acuerdo con una de las reivindicaciones 6 a 9, caracterizado por una regulación para la minimización de la ondulación del par del motor eléctrico (M) mediante una optimización dinámica de la 15 compensación de magnitud perturbadora.
Patentes similares o relacionadas:
Circuito de protección para un generador eólico, del 15 de Julio de 2020, de INGETEAM POWER TECHNOLOGY, S.A: La presente invención se refiere a un circuito de protección de un aerogenerador que incluye un filtro entre el bus DC del convertidor y tierra, […]
Circuito de alimentación de corriente polifásica, aparato de excitación, compresor y climatizador, del 1 de Enero de 2020, de DAIKIN INDUSTRIES, LTD.: Un circuito de suministro de corriente polifásica que comprende: un supresor de rayos o sobretensiones conectado a una fuente de alimentación […]
Circuito de control de fuente de alimentación de CC-CC y dispositivo electrónico, del 8 de Mayo de 2019, de Streamax Technology Co., Ltd: Un circuito de control de fuente de alimentación de CC-CC, que comprende: un diodo estabilizador de voltaje , un primer resistor , un segundo […]
Convertidor de CC-CC, del 25 de Octubre de 2017, de MITSUBISHI ELECTRIC CORPORATION: Un convertidor de CC-CC que tiene un circuito de filtro de entrada que incluye una reactancia de entrada , conectada a una fuente […]
Un sistema de conversión de energía trifásica de media tensión para acoplar una fuente de energía a una red de suministro eléctrico, del 23 de Octubre de 2017, de GAMESA INNOVATION & TECHNOLOGY, S.L: Un sistema de conversión de energía trifásica de media tensión para acoplar una fuente de energía a una red de suministro eléctrico. Comprende un […]
Método para controlar el desequilibrio de la tensión en el lado de continua de un aparato convertidor de energía, y aparato convertidor de energía, del 5 de Julio de 2017, de INGETEAM POWER TECHNOLOGY, S.A: Método para controlar el desequilibrio de la tensión en el lado de continua de un aparato convertidor de energía que comprende al menos un convertidor de […]
Procedimiento de diseño de filtro de ajuste múltiple para un sistema de HVDC, del 11 de Mayo de 2016, de LSIS Co., Ltd: Un procedimiento de diseño de un filtro de ajuste múltiple (MTF) de un sistema de corriente continua de alto voltaje (HVDC), comprendiendo el procedimiento: […]
 APARATO DE FUENTE DE POTENCIA, del 22 de Febrero de 2011, de FUJITSU GENERAL LIMITED: Aparato de fuente de potencia.Un circuito de conmutación elevador que convierte potencia alterna en voltaje continuo y suministra el voltaje continuo a una carga. El circuito […]
APARATO DE FUENTE DE POTENCIA, del 22 de Febrero de 2011, de FUJITSU GENERAL LIMITED: Aparato de fuente de potencia.Un circuito de conmutación elevador que convierte potencia alterna en voltaje continuo y suministra el voltaje continuo a una carga. El circuito […]