Procedimiento automático para determinar la compacidad de un racimo de uva en modo continuo, sobre una cinta transportadora sita en bodega.
Procedimiento automático para determinar la compacidad de un racimo de uva en modo continuo,
sobre una cinta transportadora sita en bodega (1), que comprende las etapas siguientes:
a) Capturar una imagen en color (imagen RGB original) (100A) de un racimo (3), con una cámara (41), en una campana de adquisición (4), ubicada dicha campana sobre una cinta transportadora (22) sita en bodega;
b) Segmentar la imagen RGB original (100A) para obtener una imagen de clases con racimo segmentado (100B) con los píxeles que conforman el racimo (3), los del raquis y con los que corresponden al fondo (45);
c) Clasificar los píxeles correspondientes a huecos;
d) Extraer las características morfológicas principales;
e) Extraer las características por clasificación de color;
e) Obtener el valor cuantitativo de compacidad.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201400692.
Solicitante: UNIVERSITAT POLITECNICA DE VALENCIA.
Nacionalidad solicitante: España.
Inventor/es: CUBERO GARCIA,SERGIO, MILLÁN PRIOR,Borja, DIAGO SANTAMARÍA,María Paz, TARDÁGUILA LASO,Manuel Javier, ALEIXOS BORRÁS,María Nuria, PRATS MONTALBÁN,Jose Manuel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06K9/46 FISICA. › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › G06K 9/00 Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00). › Extracción de elementos o de características de la imagen.
- G06T15/10 G06 […] › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › G06T 15/00 Interpretación de imagines 3D [Tridimensionales]. › Efectos geométricos.
- G06T7/00 G06T […] › Análisis de imagen.
Fragmento de la descripción:
Procedimiento automatico para determinar la compacidad de un racimo de uva en modo continuo, sobre una cinta transportadora sita en bodega.
s Objeto de la invención La presente invención se refiere a un procedimiento que permite determinar de fonna automática, sin manipulación del racimo, la compacidad de un racimo de uva mediante 10 visión artificial de forma objeti va y cuantitativa.
La presente invención resulta de gran interés para el sector de la viticultura en general, y especialmente para la estimación de producción de cantidad y calidad de uva.
Generalidades y estado de la técnica anterior más próximo La compacidad del racimo de uva es un parámetro de gran importancia, que influye en la calidad de la uva y del vino. Se puede definir como la densidad en la distribución de las bayas dentro del racimo, su movilidad y defonnación, así como la visibilidad del 2 O pedicelo (1) . En los racimos compactos las bayas se presentan de fonna que se tocan unas a otras en muchos puntos del racimo, quedando algunas bayas ocultas en capas interiores del racimo, con aireación limitada y afectando a la maduración por la ausencia de exposición solar. Por lo anteriormente descrito, los racimos compactos son más susceptibles a las plagas, como la polilla del racimo (21 y enfermedades fúngicas, 25 como Boflylis cil1erea (31 y oídio 141. y además de la pérdida de calidad y producción de la uva causada por la incidencia de patógenos, la heterogeneidad en la maduración de las bayas en los racimos compactos produce un detrimento en la calid ad del vino, por lo que los enólogos consideran que los racimos más sueltos son de mayor calidad
Hasta ahora el único método utilizado para detenninar la compacidad del rac imo es la escala de inspección visual propuesta por la Organización Internacional de la Vid yel Vino 111. Sin embargo, la subjetividad inherente a estos métodos invalida su uso a escala industrial. Por tanto se hace necesario un nuevo método capaz de estimar la compacidad de un racimo de fonna cuantitativa, objetiva, precisa y robusta. Recientemente también se ha fracasado en la evaluación de la compacidad a partir de medidas morfométricas del racimo medidas manualmente en laboratorio (61.
La visión por ordenador se utiliza ampliamente en la inspección automatizada en 4 O agricultura. Esta tecnología permite la creación de sistemas capaces de estimar o predecir características de los objetos inspeccionados sin la necesidad de contacto, de una manera rápida, precisa y repetible. La mayoría de las aplicaciones se relacionan Con la medición de propiedades externas como el cotor, tamaño o detección de defectos 17) . Algunas de esas propiedades se relacionan con la fonna de los objetos.
Las características morfológicas más comunes utilizadas para caracterizar la fonna de un objeto son: el área, perímetro, longitud de los ejes mayor y menor, y la relación de aspecto (8) . Sin embargo, existen pocos trabajos sobre el análisis de los racimos utilizando análisis de imagen, la mayoría centrados en el análisis morfológico. Wycislo el al. 19) utilizan diferentes ralios para estimar la forma de los racimos de uva de mesa, S como el ratio entre las longitudes de los ejes mayor/menor, el factor de forma y el valor de la compacidad de la forma. Chen el al. 110) han diseñado un sistema automatizado de inspección para valorar racimos de uva en función de su color, fonna y tamaño. Las características de forma utilizadas se calculaban a partir del área proyectada y la curva de acumulación de píxeles. Miao el al. ) 11) . con la intención de 1 0 obtener medidas geométricas de frutas de fonna dinámica, se basan en la aplicación de un algoritmo .make tras la segmentación de las imágenes, con la intención de discriminar cada baya y obtener características morfológicas de las bayas individuales del racimo.
5 Referencias bibliográficas (1) OIV, 2nd edition of the OIV descriptor list for grape varieties and Vitis species. Organisation intemationale de la vigne el du vin, Paris, (2007) .
12) Fennaud M, Cultivar susceptibility of grape berr y cJusters to larvae of Lobesia bOlrana (Lepidoptera: Tortricidae) . J Econ Entomol91 :974-980 (1998) .
13) Tardaguila J, Blanco .1, Poni S and Diago M, Mechanical yield regulation in winegrapes: comparison of early defoliation and crop thitming. Aust J Grape Wine Res 25 18:344-352 (2012) .
14) Austin CN and Wilcox WF, EtTects of sunlight exposure on grapevine powder y mildew developmenl. Phytopathology 102:857-866 (2012) .
15) Vail M and Marois J, Grape cluster architecture and the susceptibility ofberries to Botr y tis cinerea. Phytopathology 81: 188-191 (1991) .
16) Tello J and Ibanez J, Evaluation of indexes for the quantitative and objective estimation ofgrapevine bunch compactness. Vitis 53:9-16 (2014) . 35
17) Cubero S, Aleixos N, Moltó E, Gómez-Sanchis J and Blasco J, Advances in machine vision applications for automatic inspection and quality evaluation of fruits and vegetables. Food Bioprocess Tech 4:487-504 (2011) .
O (8) Costa C, Antonucci F, Pallottino F, Aguzzi J, Sun D and Menesatti P, Shape analysis of agricultural products: a review of recent research advances and potential application to computer visiono Food and Bioprocess Technology 4:673-692 (2011) .
19) Wycislo AP, Clark JR and Karcher DE, Fruit shape analysis of vitis using digital 45 photography. HortScience 43:677-680 (2008) .
{lO) Chen Y, Liao T, Lin e, Wan H and Li W, Grape Inspcction and Grading Syst cm Based 0 0 Computer Vision [J]. Transactions of the Chincsc Socicty for Agricultural Machiner y 41:169-172 (2010) .
(111 Miao Y, Xu M and Zhai P, GVF Snake Model Bascd on the Constraint ofPnor Shapc for Ovcrlapping Grape ¡mage Scgmcntation AIgorithm*, J lnfonnation Comput Sci 9:5865-5872 (2012) .
Breve descripción de las figuras 10
Glosario de referellcias
Procedimi ento automático para determ inar la compaci dad de un racimo
de uva en modo continuo, sobre una cinta transportadora sita en bodega;
15 ill Máqu ina transportadora ;
(2 1 ) Bandeja vibratoria;
(22) Cinta transportadora;
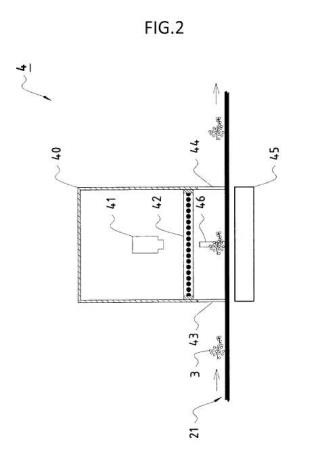
Q) Racimo;
® Campana de adquisición;
2 O (40) Carcasa;
(41) Cámara;
(42) Lámparas compuestas por LEO;
(43) Entrada;
(44) Salida;
25 (45) Fondo adaptati vo mediante pantalla TFT LeO o LED;
(46) Sensor óptico de barrera;
(100) Imagen;
(JOOA) Imagen RGB original ;
(JOOB) Imagen segmentada;
30 ( IQOC) Imagen segmentada con búsqueda de caja (bO/lIldil1g box) que contiene
el racimo;
(lOOD) Imagen segmentada con identificación del fondo;
( IOOE) Imagen segmentada con identificación de los huecos;
( IOOF) Imagen segmentada con eje princi pal de inercia y anchuras al 25%, 50%
3 5 Y75% del eje principal de in ercia.
Figura I (Fig.I) . muestra una vista de un plano exterior longitud inal de una máquina transportadora (2) de racimos (3) , cualquiera del estado de la técnica anterior, en el que se ha dispuesto una campana de adquisición (4) .
Figura 2 (Fig.2) . muestra una vista de un plano de corte longitudinal de una campana de adquisición (4) .
Figura 3 (Fig.3) . -muestra una vista de un plano de corte transversal de una campana 45 de adquisición (4) .
Figura 4 (Fig.4) . muestra un conjunto de imágenes del proceso reivindicado, donde:
Fig.4A. Imagen RGB original (1 OOA) ;
5 Fíg.4B. Imagen segmentada (1008) ;
FigAC. Imagen segmentada con bú squeda de caja (bollllding box) que
contiene el racimo (IOOC) ;
Fig.4D. Imagen segmentada con identificación del fondo (1000) ;
FigAE. Imagen segmentada con identificación de los huecos (1 QOE) ;
10 Fig.4F. Imagen segmentada con eje principal de inercia y anchuras al
25%, 50% Y 75% del eje principal de inercia (1 OOF) .
Descripción detallada de la invención y exposición de un modo de realización preferente de la invención Se describe detalladamente una realización preferente de la invención, de entre las distintas alternativas posibles, mediante enumeración de sus elapas, en base a referencias a las figuras.
O El procedimiento comprende seis etapas:
Etapa "a". Capturar una imagen en color<imagen RGB original) (1 OOA) de un racimo (3) , con una cámara (41) , en una campana de adquisición (4) , ubicada dicha campana sobre una cinta transportadora (22) sita en bodega. 25
En la Fig.4A se observa una imagen RGB original (lOOA) de un racimo (3) adquirida según se describe a continuación.
Se captura una única imagen RGB original (100A) por racimo (3) sobre un fondo 3 O adaptativo mediante pantalla TFT LCO o LEO (45) que...
Reivindicaciones:
1. Procedimiento automático para detenninar la compacidad de un racimo de uva en modo continuo, sobre una cinta transportadora sita en bodega (1) , 5 caracterizado porque comprende las etapas siguientes:
a) Capturar una imagen en color (imagen ROS original) (lODA) de un racimo (3) , con una cámara (41) , en una campana de rtdquisición (4) , ubicada dicha campana sobre una cinta transportadora (22) sita en bodega:
b) Segmentar la imagen RGB original (IOOA) para obtener una imagen de clases con racimo segmentado (1 OOB) con los píxeles que conforman el racimo (3) . Jos del raquis y con los que corresponden al fondo (45) ;
e) Clasificar los píxeJes correspondientes a huecos;
d) Extraer las características morfológicas principales;
e) Extraer las características por clasificación de color;
f) Obtener el valor cuantitativo de compacidad.
2. Procedimiento según la reivindic.1ción 1, caracterizado porque debajo de la cinta transportadora (22) , translúcida, se sitúa un fondo adaptativo mediante pantalla TFf LeD oLED (45) controlada por el ordenador principal del sistema, capaz de adaptarse al color que más diferencias presenta respecto de los racimos (3) bajo análisis, y porque este color se establece cargando una configuración almacenada en el ordenador en función de la variedad sobre la que se va a trabajar con el objetivo de proporcionar en todo momento el mayor contraste entre el racimo yel fondo de las imágenes (100) .
3. Procedimiento según cualquiera de las reivindicaciones 1 o 2, caracterizado porque la captura de la imagen ROS original (IOOA) del racimo (3) se realiza en una campana de adquisición (4) , opaca con iluminación controlada, sobre una cinta transp0l1adora (22) , translúcida, sita en bodega.
4. Procedimiento según cualquiera de las reivindicaciones I a 3, caracterizado porque el color fondo adaptativo mediante pantalla TFT LeO o LEO (45) para 4 O la captura de una imagen ROS original ( IOOA) , se adapta para cada racimo (3) de fanna individualizada, cambiando el color del mismo antes de la captura de la imagen ROS original (IOOA) , y pudiendo cambiarse de fanna automática para el siguiente racimo (3) proveniente de la cinta transportadora (22) , y así sucesivamente.
5. Procedimiento según cualqu iera de las reivindicaciones anteriores,
caracterizado porque la estimación de la compacidad se real iza por medio de
un modelo de regresión de mín imos cuad rados parciales, Partial Leas! Squares,
PLS, maximizando la covarianza entre espacios latentes de X e Y donde la
5 estructura X está fonnada por los datos obtenidos en las etapas (d) y (e) ,
mientras que Y es el valor med io de compacidad de cada racimo, estimado por
diferentes inspectores y porque una vez construido el modelo PLS a partir del
sel de calibración, se obtiene un vector de coeficientes del mode lo PLS, BpLS, de
manera que, a partir de un lluevo vector de características obtenidas en las
10 elapas (d) y (e) , se obtiene el valor predicho de compacidad a partir de la
ex presión: Y r , ....J =XB /15 =TQT =XW (p TW) -l Q T.
Patentes similares o relacionadas:
Método, sistema y producto del programa informático para determinar la presencia de microorganismos e identificar dichos microorganismos, del 29 de Julio de 2020, de BIOMERIEUX: Un método para determinar la presencia de al menos un microorganismo determinado en una placa de Petri que comprende una o más colonias de microorganismos y un medio de […]
Detección de daño de pantalla para dispositivos, del 8 de Julio de 2020, de Hyla, Inc: Un procedimiento para identificar una condición de una o más pantallas de un dispositivo electrónico, comprendiendo el procedimiento: recibir una solicitud […]
PROCEDIMIENTO DE IDENTIFICACIÓN DE IMÁGENES ÓSEAS, del 29 de Junio de 2020, de UNIVERSIDAD DE GRANADA: Procedimiento de identificación de imágenes óseas. La presente invención tiene por objeto un procedimiento para asistir en la toma de decisiones a un experto forense […]
Procedimientos, sistemas y dispositivos para analizar datos de imágenes pulmonares, del 27 de Mayo de 2020, de Pulmonx Corporation: Procedimiento para analizar datos de tomografía computarizada de un pulmón, comprendiendo el procedimiento: recibir mediante un dispositivo […]
Distribución controlada de muestras sobre sustratos, del 27 de Mayo de 2020, de Roche Diagnostics Hematology, Inc: Un procedimiento para distribuir una muestra de líquido sobre un sustrato , comprendiendo el procedimiento: obtener una […]
Sistema y procedimiento de control de calidad de platos preparados, del 14 de Mayo de 2020, de BEABLOO, S.L: Sistema y procedimiento de control de calidad de platos preparados. El sistema comprende medios de detección para detectar los ingredientes […]
Registro de imagen de catéter del seno coronario, del 13 de Mayo de 2020, de Biosense Webster (Israel), Ltd: Un aparato que comprende: un catéter cardíaco adaptado para su introducción en un seno coronario de un corazón de un sujeto vivo; una pantalla ; un dispositivo […]
Sistema y aplicación para visualizar la realidad exterior mientras se utilizan teléfonos y dispositivos móviles, del 11 de Mayo de 2020, de YAGÜE HERNANZ, Ricardo: 1. Sistema y aplicación para ver en los teléfonos y terminales móviles la realidad exterior a la vez que se usan y se visualizan sus […]