PROCEDIMIENTO Y APARATO PARA EL CONTROL DE UN SISTEMA DINAMICO MAESTRO.
Procedimiento y aparato para el control de un sistema dinámico maestro.
Procedimiento de control de un sistema dinámico maestro que comprende modelar la conducta del sistema dinámico maestro mediante un sistema discípulo que contiene una línea de retraso; construir una señal correctiva C(t) y enviar la señal correctiva C(t) al sistema dinámico maestro
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200800727.
Solicitante: UNIVERSITAT DE LES ILLES BALEARS.
Nacionalidad solicitante: España.
Provincia: ILLES BALEARS.
Inventor/es: TORAL GARCES,RAUL, CALVO IBAÑEZ,OSCAR A, CISZAK,MARZENA, MIRASSO SANTOS,CLAUDIO R.
Fecha de Solicitud: 12 de Marzo de 2008.
Fecha de Publicación: .
Fecha de Concesión: 31 de Agosto de 2011.
Clasificación Internacional de Patentes:
- G05B17/02 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 17/00 Sistemas que implican el uso de modelos o de simuladores de dichos sistemas (G05B 13/00, G05B 15/00, G05B 19/00 tienen prioridad; computadores analógicos para procedimientos, sistemas o dispositivos específicos, p. ej. simuladores, G06G 7/48). › eléctricos.
- G05B19/00 G05B […] › Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00).
Clasificación PCT:
- G05B17/02 G05B 17/00 […] › eléctricos.
- G05B19/00 G05B […] › Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00).
Fragmento de la descripción:
Procedimiento y aparato para el control de un sistema dinámico maestro.
Objeto de la invención
El objeto principal de la presente invención es un procedimiento y un aparato para controlar un sistema dinámico maestro, en el que se modela la conducta del sistema dinámico maestro mediante un sistema discípulo que contiene una línea de retraso, y se envía una señal correctiva al sistema dinámico maestro.
Antecedentes de la invención
La presente invención se enmarca dentro del campo del control de sistemas dinámicos en los que se desea corregir la aparición de conductas impredecibles y no deseadas. La conducta impredecible de dichos sistemas dinámicos puede ser debida bien a que el sistema dinámico es intrínsecamente caótico (y sea, por tanto muy sensible a las condiciones iniciales, de forma que un cambio ínfimo en las mismas provoca cambios drásticos en la conducta final) o bien a que está forzado mediante una perturbación externa desconocida. Ejemplos de sistemas que son susceptible de comportarse de modo impredecible incluyen, pero no se limitan a, neuronas, tejidos cardíacos, la corteza cerebral, mesas antivibración, circuitos electrónicos, la red eléctrica, etc.
La predicción del comportamiento de sistemas dinámicos, caóticos o no, es un campo que se ha estudiado extensamente con relación a una gran variedad de sistemas de interés físico y biológico. Sin embargo, aunque la observación de la sincronización de osciladores se remonta a experimentos ya clásicos por Huygens varios siglos atrás, es recientemente cuando se han producidos grandes avances, especialmente durante la última década, en el estudio de la sincronización de sistemas dinámicos caóticos. Decimos que "sincronizar" dos sistemas significa conseguir que funcionen de manera unísona. El caso extremo se produce cuando los dos sistemas evolucionan de manera idéntica, aunque otro ejemplo intermedio sería que ambos tuviesen sus máximos y mínimos al mismo tiempo. Un tipo de sincronización relevante para la presente invención se produce cuando uno de los sistemas anticipa el comportamiento del otro, y a él nos referimos en lo que sigue.
Recientemente, el Dr. Henning Voss (H.U. Voss, Phys. Rev. E 61, 5115 (2000); Phys. Rev. E 64, 039904 (E) (2001); Phys. Rev. Lett. 87, 014102 (2001)) ha descubierto un nuevo esquema de sincronización llamado "sincronización anticipada", demostrando que utilizando las líneas de retardo adecuado es posible sincronizar dos sistemas acoplados unidireccionalmente de modo que uno de ellos (el denominado "sistema discípulo") anticipa (en otras palabras: predice) el comportamiento del otro (el "sistema maestro"). El esquema considerado fue el siguiente:
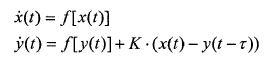
donde,
Se demuestra que este sistema de ecuaciones admite una solución estructuralmente estable de la forma:
en la que el sistema discípulo adelanta en un tiempo τ la conducta del maestro. Esto es sorprendente si consideramos el caso en que la dinámica del sistema maestro x sea aperiódica o incluso caótica, y por lo tanto "intrínsecamente impredecible".
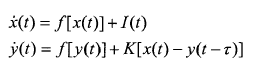
Posteriormente, los autores del presente documento profundizaron en el estudio numérico y experimental del régimen de sincronización anticipada en sistemas excitables (Anticipated synchronization in neuron models, ESANN'2003 proceedings, European Symposium on Artificial Neural Networks, Bruges (Beigium), 23-25 Abril 2003, ISBN 2-930307-03-X, págs. 373-378). Los sistemas excitables son aquellos que reaccionan con una gran respuesta (llamada "pulso") cuando la fuerza externa sobrepasa un valor umbral pequeño. La impredictabilidad intrínseca del comportamiento del sistema dinámico x, en este caso, no es debida necesariamente a una dinámica caótica sino a la existencia de fuerzas externas aperiódicas, que incluso pueden ser aleatorias. Por tanto, el sistema estudiado en este caso es:

donde I(t) representa una perturbación externa no periódica.
Es importante remarcar que ahora y(t)=x(t+τ) ya no es una solución exacta a las ecuaciones. Se descubrió que, a pesar de todo y bajo condiciones de acoplamiento adecuadas, puede producirse una correlación entre y(t) y x(t + τ) que, en la práctica, permite predecir el comportamiento futuro de x(t) con gran precisión.
Como ejemplos del anterior esquema, se consideró específicamente que los sistemas x(t) e y(t) representaran modelos de neuronas sensoriales. Las neuronas sensoriales transforman señales de estímulo externas, como presión, temperatura, pulsos eléctricos, etc., en pulsos que activan funciones corporales. Su comportamiento es típico de sistemas excitables: si el estímulo externo está por encima de un cierto valor umbral, la neurona emite un pulso. Después del pulso, se produce un proceso de recuperación, llamado período refractario, durante el cual no se puede producir un segundo pulso. En general, las neuronas sensoriales funcionan en un entorno ruidoso, y como consecuencia, los intervalos de tiempo entre pulsos contienen una componente aleatoria significativa, e incluso se pueden producir pulsos en ausencia de estímulos.
Descripción de la invención
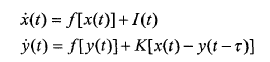
Los autores de la presente invención han descubierto que un sistema discípulo es capaz de anticipar la conducta de un sistema dinámico maestro incluso si en la ecuación que modela el comportamiento del discípulo no se incluye la señal externa y si se consideran funciones de acoplamiento no lineales, más generales que los acoplamientos lineales considerados en los ejemplos anteriores. Las ecuaciones que modelan al maestro y al discípulo son, por lo tanto:
donde, como antes:
Los inventores han demostrado que, incluso en presencia de la señal externa I(t) el sistema admite la solución aproximada y(t)=x(t + τ), en la que el discípulo adelanta un tiempo τ la conducta del maestro. La ventaja de este esquema respecto a los anteriores radica en que el sistema discípulo no está expuesto a la señal externa. Esto es especialmente importante en aquellos casos en los que, por el motivo que sea, no se tenga acceso directo a dicha señal.
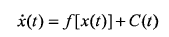
A partir de este esquema predictivo, se ha desarrollado un esquema correctivo que consiste en enviar al sistema maestro una señal correctiva cada vez que la variable dinámica del sistema discípulo cruza un cierto valor umbral. En concreto, cuando y(t) cruza el valor umbral xR,...
Reivindicaciones:
1. Procedimiento de control de un sistema dinámico maestro, caracterizado porque comprende los siguientes pasos:
(a) modelar la conducta del sistema dinámico maestro mediante un sistema discípulo, de acuerdo con las ecuaciones:
donde:
(b) construir una señal correctiva C(t);
(c) enviar la señal correctiva C(t) al sistema dinámico maestro, de manera que su dinámica se modifique temporalmente a:
2. Procedimiento de control de un sistema dinámico maestro de acuerdo con la reivindicación 1, caracterizado porque el sistema dinámico maestro es un sistema dinámico caótico.
3. Procedimiento de control de un sistema dinámico maestro de acuerdo con la reivindicación 1, caracterizado porque el sistema dinámico maestro es tejido biológico.
4. Procedimiento de control de un sistema dinámico maestro de acuerdo con la reivindicación 3, caracterizado porque el tejido biológico es uno de entre los siguientes: una neurona y tejido cardíaco.
5. Procedimiento de control de un sistema dinámico caótico maestro de acuerdo con la reivindicación 1, caracterizado porque el sistema dinámico es un uno de entre los siguientes: circuito electrónico, una mesa antivibración y la red eléctrica.
6. Procedimiento de control de un sistema dinámico maestro de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizado porque la señal C(t) está formada por pulsos.
7. Procedimiento de control de un sistema dinámico maestro de acuerdo con la reivindicación 6, caracterizado porque los pulsos son de amplitud constante.
8. Procedimiento de control de un sistema dinámico caótico maestro de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizado porque la operación de modelar la conducta del sistema dinámico caótico maestro se realiza mediante uno de los siguientes dispositivos: un PC, un circuito electrónico, un DSP, una FPGA y un microcontrolador.
9. Programa de ordenador que comprende instrucciones de programa que provocan que un ordenador lleve a cabo las operaciones de los procedimientos de acuerdo con cualquiera de las reivindicaciones anteriores.
10. Programa de ordenador de acuerdo con la reivindicación 9, caracterizado porque está almacenado en unos medios de almacenamiento.
11. Programa de ordenador de acuerdo con la reivindicación 9, caracterizado porque se transmite a través de una señal portadora.
12. Aparato (1) de control de un sistema dinámico maestro (2), caracterizado porque comprende los siguientes elementos:
un medio de entrada (4), que recibe una x(t) señal que caracteriza el comportamiento del sistema dinámico maestro (2);
un medio de cálculo (5), que recibe la señal x(t) del medio de entrada (4) y simula el comportamiento del dispositivo dinámico maestro (2) de acuerdo con la ecuación:

y construye una señal correctiva C(t);
un medio de salida (6), que envía la señal correctiva C(t) al sistema dinámico maestro (2).
13. Aparato (1) de control de un sistema dinámico maestro (2) de acuerdo con la reivindicación 12, caracterizado porque el medio de cálculo (5) es uno de los siguientes dispositivos: un PC, un microcontrolador, un DSP, una FPGA y un circuito electrónico.
14. Aparato (1) de control de un sistema dinámico maestro (2) de acuerdo con una cualquiera de las reivindicaciones 12 y 13, caracterizado porque el medio de entrada (4) comprende un par de electrodos.
15. Aparato (1) de control de un sistema dinámico maestro (2) de acuerdo con una cualquiera de las reivindicaciones 12, 13 y 14, caracterizado porque el medio de salida (6) comprende un par de electrodos.
Patentes similares o relacionadas:
Sistemas y métodos para la predicción rápida del agrietamiento inducido por hidrógeno (HIC) en tuberías, recipientes de presión y sistemas de tuberías, y para tomar medidas en relación con el mismo, del 13 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un metodo para llevar a cabo evaluaciones de idoneidad para el servicio para una region de un activo que tiene una tasa de crecimiento de dano inducido por hidrogeno, el […]
Procedimiento combinado para detectar anomalías en un sistema de distribución de agua, del 8 de Enero de 2020, de SUEZ Groupe: Un procedimiento para detectar anomalías en un sistema de distribución de agua compuesto por una red de nodos, comprendiendo dicho […]
Método y sistema para proporcionar resultados de analítica de datos, del 8 de Enero de 2020, de SIEMENS AKTIENGESELLSCHAFT: Método para proporcionar resultados de analítica de datos para un procedimiento realizado en una planta industrial, comprendiendo dicho método: (a) proporcionar […]
Desarrollo de un modelo superior, del 25 de Diciembre de 2019, de KAESER KOMPRESSOREN SE: Procedimiento para el control y/o monitorización de una instalación de compresor que comprende uno o varios compresores y uno o varios dispositivos […]
Desarrollo de un modelo superior para el control y/o monitorización de una instalación de compresor, del 25 de Diciembre de 2019, de KAESER KOMPRESSOREN SE: Procedimiento para el control y/o monitorización de una instalación de compresor que comprende uno o varios compresores y uno o varios dispositivos periféricos […]
Entrada de diagrama de tuberías e instrumentación para un proceso de control y/o supervisión de un sistema de compresor, del 6 de Noviembre de 2019, de KAESER KOMPRESSOREN SE: Procedimiento para el control y/o supervisión de una instalación de compresores que comprende uno o varios compresores y uno o varios […]
Procedimiento para la resolución de una tarea de control en una instalación de proceso, del 16 de Octubre de 2019, de Z & J Technologies GmbH: Procedimiento para la resolución de una tarea de control en una instalación de proceso, en particular para el paso de la instalación de proceso de un estado […]
Sistema de monitorización, del 12 de Junio de 2019, de BAE SYSTEMS PLC: Un método implementado por ordenador para diseñar un sistema de gestión de la salud para la monitorización del estado de una plataforma, […]